一种机器人腔体组件专用加工装卡工装的制作方法
1.本实用新型涉及装卡工装的技术领域,尤其涉及一种机器人腔体组件专用加工装卡工装。
背景技术:
2.机器人腔体组件是机器人的重要组成部件,加工工序较多,必须经过多次的装卡才能加工好,这样的装卡作业工序,很容易造成加工精度不高的后果,而且多次装卡加工的效率也比较低。
技术实现要素:
3.本实用新型旨在解决现有技术的不足,而提供一种机器人腔体组件专用加工装卡工装。
4.本实用新型为实现上述目的,采用以下技术方案:
5.一种机器人腔体组件专用加工装卡工装,包括底板,所述底板上安装有旋转座,所述旋转座一侧设有旋转板,所述旋转板面向旋转座的一侧设有转轴且转轴安装在旋转座上之后连有旋转电机,所述旋转板背向旋转座的一侧安装有装卡板,所述装卡板上设有若干个装卡组件,每个装卡组件均包括卡板、固定螺杆、立柱和螺纹调节杆,所述立柱固定在装卡板上,所述立柱端面上设有调节螺纹孔,所述螺纹调节杆旋转安装在立柱的调节螺纹孔内,所述螺纹调节杆的外端面设有顶板,所述卡板上设有条形孔,所述固定螺杆一端旋紧在装卡板上且另外一端穿出卡板的条形孔外且通过螺母固定,所述卡板抵触在顶板外端面上,待加工的机器人腔体组件通过多个装卡组件的卡板实现紧固。
6.所述旋转板面向装卡板的一面中部设有定位孔且在定位孔外圆周设有若干t形通槽,每个t形通槽内设有一个安装块,所述安装块上设有安装孔。
7.所述装卡板面向旋转板的一面中部设有定位柱,所述定位柱插接在旋转板的定位孔内,所述装卡板对应t形通槽设有若干连接孔,每个连接孔内设有一个连接螺栓,所述连接螺栓旋紧在安装块的安装孔内。
8.所述旋转座底部设有连接板,所述连接板上贯穿有若干通孔,每个通孔内安装有一个固定螺栓。
9.所述底板上平行设有若干t形滑槽,对应固定螺栓的t形滑槽内安装有滑块,所述滑块上设有螺纹孔,所述固定螺栓旋紧在滑块的螺纹孔内。
10.所述滑块为t形结构。
11.所述底板底部设有若干安装棱。
12.本实用新型的有益效果是:本实用新型提高了生产效率、减少机床数量和生产面积,减少了工序的装夹次数,机器人腔体组件在一次装夹中可加工多个表面,有利于保证这些表面之间的相互位置精度,也可减少装夹所造成的误差。
附图说明
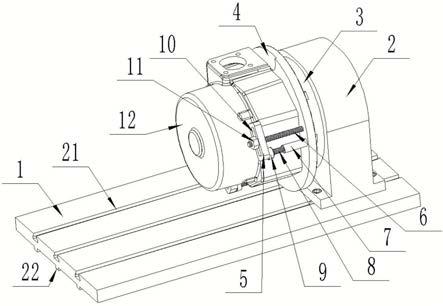
13.图1为本实用新型的结构示意图;
14.图2为本实用新型装卡有待加工的机器人腔体组件时的结构示意图;
15.图3为旋转板的详细示意图;
16.图4为装卡板的详细示意图;
17.图中:1
‑
底板;2
‑
旋转座;3
‑
旋转板;4
‑
装卡板;5
‑
卡板;6
‑
固定螺杆;7
‑
立柱;8
‑
螺纹调节杆;9
‑
顶板;10
‑
条形孔;11
‑
螺母;12
‑
机器人腔体组件;13
‑
定位孔;14
‑
t形通槽;15
‑
安装块;16
‑
定位柱;17
‑
连接螺栓;18
‑
连接板;19
‑
固定螺栓;20
‑
t形滑槽;21
‑
滑块;22
‑
安装棱;
18.以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
19.下面结合附图和实施例对本实用新型作进一步说明:
20.如图1至图4所示,一种机器人腔体组件专用加工装卡工装,包括底板1,所述底板1上安装有旋转座2,所述旋转座2一侧设有旋转板3,所述旋转板3面向旋转座2的一侧设有转轴且转轴安装在旋转座2上之后连有旋转电机,所述旋转板3背向旋转座2的一侧安装有装卡板4,所述装卡板4上设有若干个装卡组件,每个装卡组件均包括卡板5、固定螺杆6、立柱7和螺纹调节杆8,所述立柱7固定在装卡板4上,所述立柱7端面上设有调节螺纹孔,所述螺纹调节杆8旋转安装在立柱7的调节螺纹孔内,所述螺纹调节杆8的外端面设有顶板9,所述卡板5上设有条形孔10,所述固定螺杆6一端旋紧在装卡板4上且另外一端穿出卡板5的条形孔10外且通过螺母11固定,所述卡板5抵触在顶板9外端面上,待加工的机器人腔体组件12通过多个装卡组件的卡板5实现紧固。
21.所述旋转板3面向装卡板4的一面中部设有定位孔13且在定位孔13外圆周设有若干t形通槽14,每个t形通槽14内设有一个安装块15,所述安装块15上设有安装孔。
22.所述装卡板4面向旋转板3的一面中部设有定位柱16,所述定位柱16插接在旋转板3的定位孔13内,所述装卡板4对应t形通槽14设有若干连接孔,每个连接孔内设有一个连接螺栓17,所述连接螺栓17旋紧在安装块15的安装孔内。
23.所述旋转座2底部设有连接板18,所述连接板18上贯穿有若干通孔,每个通孔内安装有一个固定螺栓19。
24.所述底板1上平行设有若干t形滑槽20,对应固定螺栓19的t形滑槽20内安装有滑块21,所述滑块21上设有螺纹孔,所述固定螺栓19旋紧在滑块21的螺纹孔内。
25.所述滑块21为t形结构。
26.所述底板1底部设有若干安装棱22。
27.本实用新型工作时,将机器人腔体组件12放在装卡板4一侧,通过卡板5进行固定,卡板5的位置可以通过螺纹调节杆8进行调节,适用于更多的产品,装卡完毕后,通过旋转板3的转动带动机器人腔体组件12到位进行各个位置的加工。装卡板4可以根据需要跟换与产品配套的大小,安装方便。装置总体的位置可以在底板1上调节。
28.本实用新型提高了生产效率、减少机床数量和生产面积,减少了工序的装夹次数,机器人腔体组件12在一次装夹中可加工多个表面,有利于保证这些表面之间的相互位置精
度,也可减少装夹所造成的误差。
29.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
技术特征:
1.一种机器人腔体组件专用加工装卡工装,其特征在于,包括底板(1),所述底板(1)上安装有旋转座(2),所述旋转座(2)一侧设有旋转板(3),所述旋转板(3)面向旋转座(2)的一侧设有转轴且转轴安装在旋转座(2)上之后连有旋转电机,所述旋转板(3)背向旋转座(2)的一侧安装有装卡板(4),所述装卡板(4)上设有若干个装卡组件,每个装卡组件均包括卡板(5)、固定螺杆(6)、立柱(7)和螺纹调节杆(8),所述立柱(7)固定在装卡板(4)上,所述立柱(7)端面上设有调节螺纹孔,所述螺纹调节杆(8)旋转安装在立柱(7)的调节螺纹孔内,所述螺纹调节杆(8)的外端面设有顶板(9),所述卡板(5)上设有条形孔(10),所述固定螺杆(6)一端旋紧在装卡板(4)上且另外一端穿出卡板(5)的条形孔(10)外且通过螺母(11)固定,所述卡板(5)抵触在顶板(9)外端面上,待加工的机器人腔体组件(12)通过多个装卡组件的卡板(5)实现紧固。2.根据权利要求1所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述旋转板(3)面向装卡板(4)的一面中部设有定位孔(13)且在定位孔(13)外圆周设有若干t形通槽(14),每个t形通槽(14)内设有一个安装块(15),所述安装块(15)上设有安装孔。3.根据权利要求2所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述装卡板(4)面向旋转板(3)的一面中部设有定位柱(16),所述定位柱(16)插接在旋转板(3)的定位孔(13)内,所述装卡板(4)对应t形通槽(14)设有若干连接孔,每个连接孔内设有一个连接螺栓(17),所述连接螺栓(17)旋紧在安装块(15)的安装孔内。4.根据权利要求3所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述旋转座(2)底部设有连接板(18),所述连接板(18)上贯穿有若干通孔,每个通孔内安装有一个固定螺栓(19)。5.根据权利要求4所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述底板(1)上平行设有若干t形滑槽(20),对应固定螺栓(19)的t形滑槽(20)内安装有滑块(21),所述滑块(21)上设有螺纹孔,所述固定螺栓(19)旋紧在滑块(21)的螺纹孔内。6.根据权利要求5所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述滑块(21)为t形结构。7.根据权利要求6所述的一种机器人腔体组件专用加工装卡工装,其特征在于,所述底板(1)底部设有若干安装棱(22)。
技术总结
本实用新型是一种机器人腔体组件专用加工装卡工装,包括底板,底板上安装有旋转座,旋转座一侧设有旋转板,旋转板连有转轴、旋转电机,旋转板背向旋转座的一侧安装有装卡板,装卡板上设有若干个装卡组件,每个装卡组件均包括卡板、固定螺杆、立柱和螺纹调节杆,立柱固定在装卡板上,立柱端面上设有调节螺纹孔,螺纹调节杆旋转安装在立柱的调节螺纹孔内,螺纹调节杆的外端面设有顶板,卡板上设有条形孔,固定螺杆一端旋紧在装卡板上且另外一端穿出卡板的条形孔外且通过螺母固定,卡板抵触在顶板外端面上。本实用新型提高了生产效率,减少了工序的装夹次数,机器人腔体组件在一次装夹中可加工多个表面,减少装夹所造成的误差。减少装夹所造成的误差。减少装夹所造成的误差。
技术研发人员:田卫东 别云波
受保护的技术使用者:天津市航宇嘉瑞科技股份有限公司
技术研发日:2020.12.24
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1