便携式数控轨道钻及其控制方法与流程
本发明属于钻孔工具,涉及一种轨道钻孔工具,尤其涉及一种便携式数控轨道钻及其控制方法。
背景技术:
1、轨道钻是一种在铁轨上钻孔的工具。现有轨道钻存在如下缺陷:
2、(1)一次只能打一个孔;轨道钻每固定一次只打一个孔,换位置重需重新固定打下一个孔。
3、(2)单边卡放,中心不稳,易打偏;动力装置和钻孔装置偏置一边,重心不在钢轨上,不易保持平衡。
4、(3)不同规格铁路需更换不同固定块,操作繁琐配件多;钢轨通常使用50轨和60轨,不同规格钢轨需配不同固定块保证固定效果。
5、(4)不可轨道推行,需搬运;钢轨是一定间距打一个或多个孔,轨道钻无行动装置,需要工具搬运。
6、有鉴于此,如今迫切需要设计一种新的轨道钻工工具,以便克服现有轨道钻工工具存在的上述至少部分缺陷。
技术实现思路
1、本发明提供一种便携式数控轨道钻及其控制方法,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
2、为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
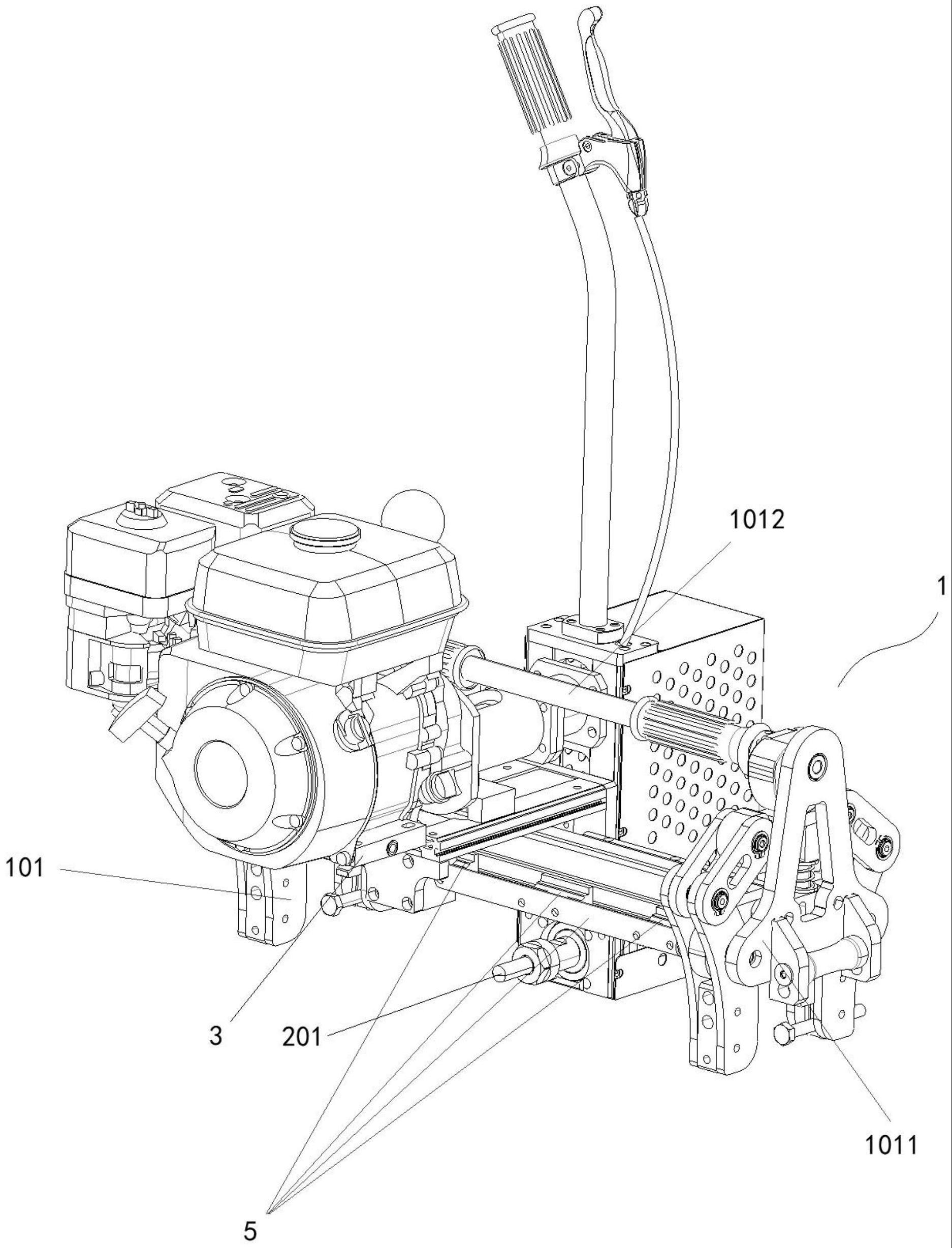
3、一种便携式数控轨道钻,所述便携式数控轨道钻包括机身、钻孔装置及定位辅助机构,所述钻孔装置及定位辅助机构设置于所述机身;
4、所述机身设有推杆、夹紧机构、滑动机构;所述推杆的一端设置于所述机身,夹紧机构设置于所述机身底部,能夹紧轨道;所述钻孔装置设置于所述滑动机构,能沿设定轨迹滑动;
5、所述钻孔装置包括钻头组件、驱动机构、传动机构,所述驱动机构的输出轴连接所述传动机构,所述传动机构连接所述钻头组件,所述钻头组件能在所述驱动机构的驱动下旋转;
6、所述定位辅助机构设置于所述钻孔装置的一侧,用以辅助所述钻孔装置定位钻孔位置。
7、作为本发明的一种实施方式,所述定位辅助机构设置于所述钻孔装置的一侧,用以发出光线,发出的光线中心与所述钻头组件的钻孔中心对应。
8、作为本发明的一种实施方式,所述定位辅助机构包括红外光发射器。
9、作为本发明的一种实施方式,所述定位辅助机构包括摄像机构、图像处理模块、比对数据库、图像比对模块、移动参数确定模块;
10、所述摄像机构用以获取设定位置的图像;
11、所述图像处理模块用以对所述摄像机构获取的图像进行处理;
12、所述比对数据库用以存储待比对图像及各图像对应的移动参数;
13、所述图像比对模块用以将经过所述图像处理模块处理的图像与所述比对数据库中的图像进行比对,获取达到设定标准的图像;
14、所述孔位确定模块用以根据所述图像比对模块的比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向。
15、作为本发明的一种实施方式,所述图像处理模块用以获取所述摄像机构拍摄的图像中心位置距离图像中第一孔位的像素数;所述比对数据库存储的数据中包含图像中心位置距离图像中第一孔位的像素数及相应的移动距离数据。
16、作为本发明的一种实施方式,所述定位辅助机构包括:摄像机构、数学模型建立模块、移动距离生成模块;
17、所述摄像机构用以获取设定位置的图像;
18、所述数学模型建立模块用以根据摄像机构拍摄的历史数据及对应的移动距离做自主学习,从而建立相应的数学模型;
19、所述移动距离生成模块将所述摄像机构拍摄的图像输入至所述数学模型建立模块建立的数学模型,得到需要移动的距离数据。
20、作为本发明的一种实施方式,所述机身设有刹车机构。
21、作为本发明的一种实施方式,所述机身连接有推杆,所述机身设有推杆固定座,所述推杆通过所述推杆固定座设置。
22、作为本发明的一种实施方式,所述驱动机构包括内燃机动力系统。
23、作为本发明的一种实施方式,所述便携式数控轨道钻进一步包括钻头精准移动驱动机构,所述钻头精准移动驱动机构连接所述钻头组件,能驱动所述钻头组件移动设定距离。
24、作为本发明的一种实施方式,所述钻头组件包括钻头,所述钻头内设有冷却介质流道,所述冷却介质流道的一端设置于所述钻头的头部;所述便携式数控轨道钻包括钻头冷却系统;
25、所述钻头冷却系统包括冷却管路、冷却介质容器、冷却介质驱动机构、冷却介质驱动控制电路;
26、所述冷却介质容器通过冷却管路连接冷却介质流道,冷却介质驱动控制电路连接冷却介质驱动机构,控制冷却介质驱动机构将冷却介质容器中的冷却介质通过冷却管路输送至钻头的冷却介质流道。
27、根据本发明的另一个方面,采用如下技术方案:一种上述便携式数控轨道钻的控制方法,所述控制方法包括如下步骤:
28、控制系统控制钻孔装置在第一铁轨的第一位置打孔,形成第一孔位;
29、通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第一铁轨上距离第一位置设定距离处进行打孔;按照这种方式打孔,使得第一铁轨的设定区域完成的打孔数达到预设数量;
30、将便携式数控轨道钻移动至与所述第一铁轨相对的第二铁轨,靠近第二铁轨上、与所述第一铁轨的第一孔位相对的位置附近;
31、通过摄像机构获取第一铁轨各孔位的图像;
32、对所述摄像机构获取的图像进行设定处理;
33、将经过处理的图像与比对数据库中的图像进行比对,获取达到设定标准的图像;所述比对数据库存储待比对图像及各图像对应的移动参数;
34、根据比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向;
35、通过移动驱动机构驱动所述钻孔装置移动所述移动参数对应的移动距离;再次通过摄像机构获取第一铁轨各孔位的图像,并进行处理、比对,获取对应的移动参数,直至移动参数对应的移动距离为0,表示钻孔装置处于正确的位置;
36、控制系统控制钻孔装置打孔,形成第二孔位;
37、通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第二铁轨上距离第二孔位设定距离处进行打孔;按照这种方式打孔,使得第二铁轨的设定区域完成的打孔数达到预设数量,完成对该处的打孔工作。
38、本发明的有益效果在于:本发明提出的便携式数控轨道钻及其控制方法,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
技术特征:
1.一种便携式数控轨道钻,其特征在于,所述便携式数控轨道钻包括机身、钻孔装置及定位辅助机构,所述钻孔装置及定位辅助机构设置于所述机身;
2.根据权利要求1所述的便携式数控轨道钻,其特征在于:
3.根据权利要求2所述的便携式数控轨道钻,其特征在于:
4.根据权利要求1所述的便携式数控轨道钻,其特征在于:
5.根据权利要求4所述的便携式数控轨道钻,其特征在于:
6.根据权利要求1所述的便携式数控轨道钻,其特征在于:
7.根据权利要求1所述的便携式数控轨道钻,其特征在于:
8.根据权利要求1所述的便携式数控轨道钻,其特征在于:
9.根据权利要求1所述的便携式数控轨道钻,其特征在于:
10.一种权利要求1至9任一所述便携式数控轨道钻的控制方法,其特征在于,所述控制方法包括如下步骤:
技术总结
本发明揭示了一种便携式数控轨道钻及其控制方法,所述便携式数控轨道钻包括机身、钻孔装置及定位辅助机构,钻孔装置及定位辅助机构设置于机身;机身设有推杆、夹紧机构、滑动机构;推杆的一端设置于机身,夹紧机构设置于机身底部,能夹紧轨道;钻孔装置设置于所述滑动机构,能沿设定轨迹滑动;钻孔装置包括钻头组件、驱动机构、传动机构,驱动机构的输出轴连接所述传动机构,传动机构连接所述钻头组件,钻头组件能在所述驱动机构的驱动下旋转;定位辅助机构设置于所述钻孔装置的一侧,用以发出光线,发出的光线中心与所述钻头组件的钻孔中心对应。本发明提出的便携式数控轨道钻,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
技术研发人员:周荣生,倪明龙,应淼沸,经辰
受保护的技术使用者:中国铁路通信信号上海工程局集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!