一种工业机器人制造用焊接工装的制作方法
1.本实用新型涉及机器自动焊接技术领域,特别涉及一种工业机器人制造用焊接工装。
背景技术:
2.一般的焊接作业通常采用人工手持焊枪和护目镜同步进行焊接,这种作业方式焊接效率慢,由于作业人员的技术水平和作业方式不同,这样焊接的质量无法保证,作业过程中安全隐患也比较大,因此需要设计一个自动的焊接工装,具有自动焊接工能,焊接完成还能自动检测焊缝。
技术实现要素:
3.本实用新型为了解决现有技术的问题,提供了一种工业机器人制造用焊接工装,具有自动对焊接件固定、自动焊接、自动检测焊缝的功能。
4.具体技术方案如下:一种工业机器人制造用焊接工装,包括有通过步进电机带动的滚珠丝杠,滚珠丝杠两侧设有直线导轨,所述直线导轨上配合有滑块,所述滑块上固定有滑动板,在滑动板的一侧固定有导板,导板前端固定有焊接头,两个活动板分设在固定平台下方,所述活动板与气缸轴端连接,气缸固定在固定平台上,两个活动板下方固定有压板,焊接件置于底座上,通过气缸带动活动板对焊接件压紧,焊接头进行焊接。
5.进一步的技术方案,固定平台上设有ccd相机固定架,通过ccd相机对焊缝进行检测。
6.进一步的技术方案,两个压板之间留有间隙,该间隙方便焊接头通过。
7.进一步的技术方案,所述导板上开设有长条槽孔,以便减轻滚珠丝杠的运动负载。
8.本实用新型的技术效果
9.步进电机带动滚珠丝杠运动,滚珠丝杠两侧设有直线导轨,直线导轨上配合有滑块,滑块上固定有滑动板,在滑动板的一侧固定有导板,导板前端固定有焊接头,上述设计实现了焊接头的精准运动,活动板分设在固定平台下方,活动板与气缸轴端连接,气缸固定在固定平台上,两个活动板下方固定有压板,焊接件置于底座上,通过气缸带动活动板对焊接件压紧,焊接头进行焊接,焊接完成后通过ccd相机进行检测。本实用新型代替人工作业,安全高效。
附图说明
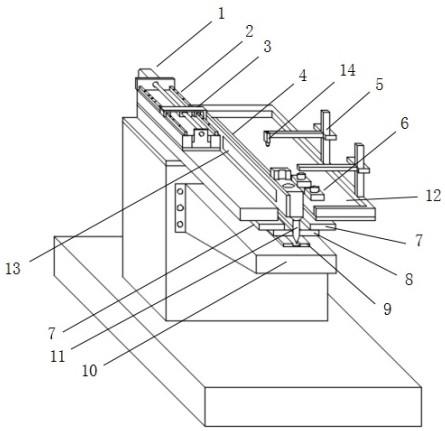
10.图1是本实用新型结构示意图;
11.图中;1步进电机、2直线导轨、3滑动板、4导板、5ccd相机固定架、6气缸、7活动板、8压板、9焊接件、10底座、11焊接头、12固定平台、13长条槽孔、14ccd相机。
具体实施方式
12.下面,结合实例对本实用新型的实质性特点和优势作进一步的说明,但本实用新型并不局限于所列的实施例。
13.如图1所示,一种工业机器人制造用焊接工装,包括有通过步进电机1带动的滚珠丝杠,滚珠丝杠两侧设有直线导轨2,所述直线导轨2上配合有滑块(本图中未标记),所述滑块上固定有滑动板3,在滑动板3的一侧固定有导板4,导板4前端固定有焊接头11,两个活动板7分设在固定平台12下方,所述活动板7与气缸6轴端连接,气缸6固定在固定平台12上,两个活动板7下方固定有压板8,焊接件9置于底座10上,通过气缸6带动活动板7对焊接件9压紧,焊接头11进行焊接。
14.本实用新型中,固定平台12上设有ccd相机固定架5,通过ccd相机对焊缝进行检测。
15.本实用新型中,两个压板8之间留有间隙,该间隙不干涉焊接头11运动。
16.本实用新型中,所述导板4上开设有长条槽孔13,以便减轻滚珠丝杠的运动负载。
17.综上所述,步进电机1带动滚珠丝杠运动,滚珠丝杠两侧设有直线导轨2,所述直线导轨2上配合有滑块,滑块上固定有滑动板3,在滑动板3的一侧固定有导板4,导板4前端固定有焊接头11,上述设计实现了焊接头11的精准运动,活动板7分设在固定平台12下方,活动板7与气缸轴端连接,气缸6固定在固定平台12上,两个活动板7下方固定有压板8,焊接件9置于底座10上,通过气缸6带动活动板7对焊接件9压紧,焊接头9进行焊接,焊接完成后通过ccd相机14进行检测。本实用新型代替人工作业,安全高效。
18.需要指出的是,上述较佳实施例仅为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种工业机器人制造用焊接工装,包括有通过步进电机带动的滚珠丝杠,滚珠丝杠两侧设有直线导轨,所述直线导轨上配合有滑块,其特征在于,所述滑块上固定有滑动板,在滑动板的一侧固定有导板,导板前端固定有焊接头,两个活动板分设在固定平台下方,所述活动板与气缸轴端连接,气缸固定在固定平台上,两个活动板下方固定有压板,焊接件置于底座上,通过气缸带动活动板对焊接件压紧,焊接头进行焊接。2.根据权利要求1所述的一种工业机器人制造用焊接工装,其特征在于,固定平台上设有ccd相机固定架,通过ccd相机对焊缝进行检测。3.根据权利要求1所述的一种工业机器人制造用焊接工装,其特征在于,两个压板之间留有间隙,该间隙方便焊接头通过。4.根据权利要求1所述的一种工业机器人制造用焊接工装,其特征在于,所述导板上开设有长条槽孔,以便减轻滚珠丝杠的运动负载。
技术总结
本实用新型涉及一种工业机器人制造用焊接工装,包括有通过步进电机带动的滚珠丝杠,滚珠丝杠两侧设有直线导轨,所述直线导轨上配合有滑块,所述滑块上固定有滑动板,在滑动板的一侧固定有导板,导板前端固定有焊接头,两个活动板分设在固定平台下方,所述活动板与气缸轴端连接,气缸固定在固定平台上,两个活动板下方固定有压板,焊接件置于底座上,通过气缸带动活动板对焊接件压紧,焊接头进行焊接,固定平台上设有CCD相机固定架,通过CCD相机对焊缝进行检测,两个压板之间留有间隙,该间隙方便焊接头通过,所述导板上开设有长条槽孔,以便减轻滚珠丝杠的运动负载。以便减轻滚珠丝杠的运动负载。以便减轻滚珠丝杠的运动负载。
技术研发人员:魏鹏 孟帅
受保护的技术使用者:江苏焊威机器人科技有限公司
技术研发日:2021.04.20
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1