一种自动升降式机器人弧光遮挡工作站的制作方法
1.本实用新型涉及机器人焊接领域,具体涉及一种自动升降式机器人弧光遮挡工作站。
背景技术:
2.目前,在智能焊接机器人应用领域中,厂方对于员工工作环境及生产安全有相应的规定,一般都是通过加装防护围栏、卷帘门、遮光帘等部件以实现空间隔绝,防止焊接飞溅、焊接弧光等对人体造成伤害。但是实践表明,很多部件为固定式或半固定式,对于高频次、产品焊接时间短的产品生产会造成相应的不便,影响产品生产效率。
技术实现要素:
3.本实用新型的目的是提供一种自动升降式机器人弧光遮挡工作站,以解决不能有效遮挡弧光的问题。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种自动升降式机器人弧光遮挡工作站,包括,工作台、机械手和遮挡板;所述机械手用于焊接工件;所述工作台的数量有两个,两个所述工作台位于所述机械手的两侧,两个所述工作台的两端与变位机连接;所述遮挡板的数量有两个,所述遮挡板位于所述工作台和所述机械手之间,所述遮挡板能够升降。
6.进一步地,还包括挡板支架,所述遮挡板与所述挡板支架滑动连接。
7.进一步地,所述挡板支架水平方向中部位置,固定连接有伸缩杆,所述伸缩杆另一端与所述遮挡板固定连接。
8.进一步地,所述挡板支架顶部两端均固定连接有开设有滑动通孔的滑块,所述遮挡板两端均固定连接有滑杆,所述滑杆穿过所述滑块并与所述滑块滑动连接。
9.进一步地,所述滑块上分别固定连接有方向向上和方向向下的缓冲气缸。
10.进一步地,还包括防护网,所述防护网围绕所述工作台、所述机械手和所述遮挡板,于两个所述工作台外侧,远离所述机械手的位置设有开口。
11.进一步地,还包括控制中心,所述控制中心与所述遮挡板、所述机械手和所述变位机控制连接。
12.进一步地,所述遮挡板包括遮挡框架和遮挡玻璃,所述遮挡玻璃与所述遮挡框架固定连接。
13.本实用新型的有益效果:
14.在焊接工件的过程中,需要机械手和变位机的配合才能够对工件进行全方位的焊接。采用两个工作台,当机械手对一个工作台上的零件进行焊接时,靠近焊接的工作台的遮挡板下降,为机械手的焊接活动提供空间,远离焊接的工作台的遮挡板上升,对弧光进行遮挡,在未焊接的工作台上,工人对工件进行拆卸或者固定,避免了工人造成伤害。
附图说明
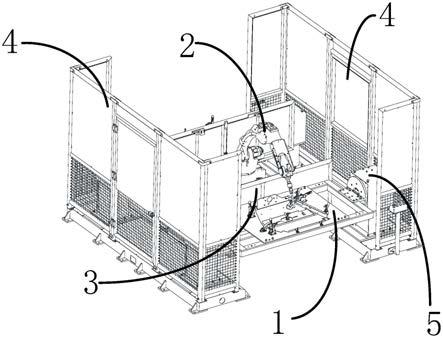
15.图1是一种自动升降式机器人弧光遮挡工作站整体结构图;
16.图2是一种自动升降式机器人弧光遮挡工作站遮挡板结构图;
17.图3是一种自动升降式机器人弧光遮挡工作站遮挡板爆炸图。
18.图中各标记对应的名称:
[0019]1‑
工作台;2
‑
机械手;3
‑
遮挡板;31
‑
遮挡框架;32
‑
遮挡玻璃;4
‑
防护网;5
‑
变位机;6
‑
滑杆;7
‑
伸缩杆;8
‑
挡板支架;9
‑
滑块;10
‑
缓冲气缸。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
[0021]
本实用新型的实施例:
[0022]
参见附图1
‑
2,一种自动升降式机器人弧光遮挡工作站,包括,工作台1、机械手2、遮挡板3、挡板支架8、防护网4、变位机5和控制中心;机械手2用于焊接工件,工作台1位于机械手2左右侧均用于放置工件,遮挡板3的数量有两个,遮挡板3位于工作台1和机械手2之间,防护网4用于围绕整体,控制中心用于控制机械手2、遮挡板3和变位机5。
[0023]
两个工作台1的两端均与变位机5连接。机械手2对工件进行焊接时,工件在不转动的情况下并不能完成对整个工件的焊接,通过变位机5使工件转动,从而使机械手2能够完成对整个工件的焊接。
[0024]
遮挡板3的数量有两个,遮挡板3位于工作台1和机械手2之间,遮挡板3滑动连接在挡板支架8上能够升降。遮挡板3包括遮挡框架31和遮挡玻璃32,遮挡玻璃32与遮挡框架31固定连接。当机械手2对右侧的工作台1上的工件进行焊接时,右侧的遮挡板3下降,方便机械手2的焊接,左侧的遮挡板3上升,遮挡弧光,同时能够对左侧的工作人员进行保护,防止机械手2故障误伤工作人员。
[0025]
参见附图1
‑
3,挡板支架8水平方向底部中间位置,固定连接有伸缩杆7,伸缩杆7另一端与遮挡板3固定连接。通过控制中心控制伸缩杆7的长度,从而达到对弧光遮挡的目的。挡板支架8顶部两端均固定连接有开设有滑动通孔的滑块9,遮挡板3两端均固定连接有滑杆6,滑杆6穿过滑块9并与滑块9滑动连接,滑杆6和滑动通孔的配合使得遮挡板3的升降更加平顺,同时也增加了遮挡板3的强度。所述滑块9上分别固定连接有方向向上和方向向下的缓冲气缸10,通过两个方向的缓冲气缸10,在伸缩杆7伸长或者缩短到极限位置时,缓冲气缸10能够起到缓冲的效果。
[0026]
防护网4围绕工作台1、机械手2和遮挡板3,于两个工作台1外侧,远离机械手2的位置设有开口,开口位置方便工作人员对工作台1上的工件进行操作。
[0027]
控制中心用于控制机械手2、遮挡板3和变位机5,当机械手2对右侧的工作台1上的工件进行焊接时,控制右侧的遮挡板3下降,左侧的遮挡板3上升;当焊接需要转动才能够焊接的位置时,控制中心控制变位机5使变位机5带动工件转动,控制机械手2对需焊接位置进行焊接;当右侧焊接完成后,控制机械手2转动,右侧的遮挡板3上升,左侧的遮挡板3下降,从而使得机械手2进行左侧的工作台1上的工件进行焊接。
[0028]
本使用新型的使用方法:
[0029]
首先工作人员将工件固定在右侧的工作台1上,当固定完成后,启动机械手2,使机械手2对右侧的工作台1上的工件进行焊接。同时控制左侧的伸缩杆7伸长,左侧的遮挡板3向上运动,避免焊接过程中产生的孤光对左侧的工作台1位置的影响。在右侧的工作台1上的工件焊接过程中,工作人员将工件固定在左侧的工作台1上,当右侧的工作台1上的工件焊接完成后,控制机械手2转动,左侧的伸缩杆7缩短,左侧的遮挡板3向下运动,右侧的伸缩杆7伸长,右侧的遮挡板3向上运动,机械手2对左侧的工作台1上的工件进行焊接。
[0030]
本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本申请相同或相近似的技术方案,均落在本实用新型的保护范围之内。
技术特征:
1.一种自动升降式机器人弧光遮挡工作站,其特征在于,包括,工作台、机械手和遮挡板;所述机械手用于焊接工件;所述工作台的数量有两个,两个所述工作台位于所述机械手的两侧,两个所述工作台的两端与变位机连接;所述遮挡板的数量有两个,所述遮挡板位于所述工作台和所述机械手之间,所述遮挡板能够升降。2.根据权利要求1所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,还包括挡板支架,所述遮挡板与所述挡板支架滑动连接。3.根据权利要求2所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,所述挡板支架水平方向中部位置,固定连接有伸缩杆,所述伸缩杆另一端与所述遮挡板固定连接。4.根据权利要求2所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,所述挡板支架顶部两端均固定连接有开设有滑动通孔的滑块,所述遮挡板两端均固定连接有滑杆,所述滑杆穿过所述滑块并与所述滑块滑动连接。5.根据权利要求4所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,所述滑块上分别固定连接有方向向上和方向向下的缓冲气缸。6.根据权利要求1所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,还包括防护网,所述防护网围绕所述工作台、所述机械手和所述遮挡板,于两个所述工作台外侧,远离所述机械手的位置设有开口。7.根据权利要求1所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,还包括控制中心,所述控制中心与所述遮挡板、所述机械手和所述变位机控制连接。8.根据权利要求1
‑
6任一项所述的一种自动升降式机器人弧光遮挡工作站,其特征在于,所述遮挡板包括遮挡框架和遮挡玻璃,所述遮挡玻璃与所述遮挡框架固定连接。
技术总结
本实用新型涉及一种自动升降式机器人弧光遮挡工作站,包括,工作台、机械手和遮挡板;机械手用于焊接工件;工作台的数量有两个,两个工作台位于机械手的两侧,两个工作台的两端与变位机连接;遮挡板的数量有两个,遮挡板位于工作台和机械手之间,遮挡板能够升降。在焊接工件的过程中,需要机械手和变位机的配合才能够对工件进行全方位的焊接。采用两个工作台,当机械手对一个工作台上的零件进行焊接时,靠近焊接的工作台的遮挡板下降,为机械手的焊接活动提供空间,远离焊接的工作台的遮挡板上升,对弧光进行遮挡,在未焊接的工作台上,工人对工件进行拆卸或者固定,避免了工人造成伤害。伤害。伤害。
技术研发人员:叶世启 张少帅 高焱彬 金俊杰
受保护的技术使用者:河南大道机器人自动化系统有限公司
技术研发日:2021.04.26
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1