工件自动放件冲孔装置的制作方法
1.本实用新型涉及工件加工设备领域,尤其是工件自动放件冲孔装置。
背景技术:
2.工件在进行加工的过程中需要进行冲孔,在冲孔之前需要将工件调整好方向后,搬运到冲孔机内进行冲孔。但是现在这些工作都是人工进行,因此工作效率较低,且定位精度不高。
技术实现要素:
3.为了解决背景技术中描述的技术问题,本实用新型提供了一种工件自动放件冲孔装置。通过工件升降台将工件抬升到取料高度。通过多轴机器人一及吸工件机构一将工件放置到定位平台上。通过多轴机器人二及吸工件机构二将工件放入冲孔机内。通过ccd工业相机判断工件的朝向。本申请提高了工件放板的工作效率,提高了定位精度。
4.本实用新型解决其技术问题所采用的技术方案是:
5.一种工件自动放件冲孔装置,包括工件加工室、工件升降台、定位平台、多轴机器人一、吸工件机构一、多轴机器人二、吸工件机构二、ccd工业相机,所述工件升降台、定位平台、多轴机器人一、多轴机器人二、ccd工业相机均安装在工件加工室内,多轴机器人二上安装有吸工件机构二,多轴机器人一上安装有吸工件机构一。
6.具体地,所述工件升降台由台体、升降线性模组和升降板组成,升降线性模组的缸体固定在台体上,升降板滑配连接在台体上,升降板固定在升降线性模组的滑座上。
7.具体地,所述吸工件机构一由直线支架、连接杆、吸盘一组成,直线支架固定在多轴机器人一上,直线支架两端分别固定有连接杆,连接杆上依次固定有数个吸盘一。
8.具体地,所述吸工件机构二由矩形框架、吸盘二组成,两个矩形框架固定在多轴机器人二上,矩形框架上固定有数个吸盘二。
9.本实用新型的有益效果是:本实用新型提供了一种工件自动放件冲孔装置。通过工件升降台将工件抬升到取料高度。通过多轴机器人一及吸工件机构一将工件放置到定位平台上。通过多轴机器人二及吸工件机构二将工件放入冲孔机内。通过ccd工业相机判断工件的朝向。本申请提高了工件放板的工作效率,提高了定位精度。
附图说明
10.下面结合附图和实施例对本实用新型进一步说明。
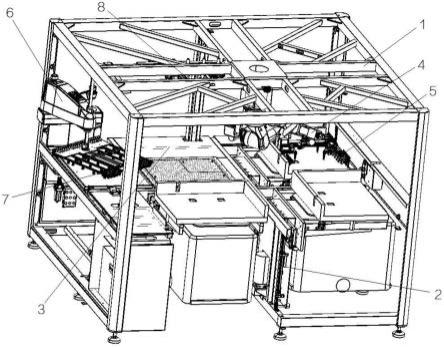
11.图1是本实用新型的结构示意图;
12.图2是本实用新型的吸工件机构一的结构示意图;
13.图3是本实用新型的吸工件机构二的结构示意图;
14.图中1.工件加工室,2.工件升降台,3.定位平台,4.多轴机器人一,5.吸工件机构一,6.多轴机器人二,7.吸工件机构二,8.ccd工业相机,51.直线支架,52.连接杆,53.吸盘
一,71.矩形框架,72.吸盘二。
具体实施方式
15.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
16.图1是本实用新型的结构示意图,图2是本实用新型的吸工件机构一的结构示意图,图3是本实用新型的吸工件机构二的结构示意图。
17.一种工件自动放件冲孔装置,包括工件加工室1、工件升降台2、定位平台3、多轴机器人一4、吸工件机构一5、多轴机器人二6、吸工件机构二7、ccd工业相机8,所述工件升降台2、定位平台3、多轴机器人一4、多轴机器人二6、ccd工业相机8均安装在工件加工室1内,多轴机器人二6上安装有吸工件机构二7,多轴机器人一4上安装有吸工件机构一5。工件升降台2由台体、升降线性模组和升降板组成,升降线性模组的缸体固定在台体上,升降板滑配连接在台体上,升降板固定在升降线性模组的滑座上。吸工件机构一5由直线支架51、连接杆52、吸盘一53组成,直线支架51固定在多轴机器人一4上,直线支架51两端分别固定有连接杆52,连接杆52上依次固定有数个吸盘一53。吸工件机构二7由矩形框架71、吸盘二72组成,两个矩形框架71固定在多轴机器人二6上,矩形框架71上固定有数个吸盘二72。
18.结合附图1、附图2和附图3所示,工件置于工件升降台2的升降板上,然后升降线性模组驱使升降板上移,当升降板带着产品上移至取件高度之后,多轴机器人一4驱使吸工件机构一5过来抓取工件。吸工件机构一5的吸盘一53通过负压吸力吸住工件之后,多轴机器人一4将工件抓起,ccd工业相机8将被抓起的工件的图像信息传送至控制机内,控制机控制多轴机器人一4调整工件的朝向,最后将调整好朝向的工件放置到定位平台3上。此时多轴机器人二6驱使吸工件机构二7抓起定位平台3上的工件,吸工件机构二7的吸盘二72通过负压吸力吸住产品,最后多轴机器人二6将产品送入冲孔机内进行冲孔。该定位平台3为带孔且透光材料,因此更容易让ccd工业相机8捕捉到工件的mark点,从而起到精密定位的作用。
19.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种工件自动放件冲孔装置,其特征在于:包括工件加工室(1)、工件升降台(2)、定位平台(3)、多轴机器人一(4)、吸工件机构一(5)、多轴机器人二(6)、吸工件机构二(7)、ccd工业相机(8),所述工件升降台(2)、定位平台(3)、多轴机器人一(4)、多轴机器人二(6)、ccd工业相机(8)均安装在工件加工室(1)内,多轴机器人二(6)上安装有吸工件机构二(7),多轴机器人一(4)上安装有吸工件机构一(5)。2.根据权利要求1所述的工件自动放件冲孔装置,其特征在于:所述工件升降台(2)由台体、升降线性模组和升降板组成,升降线性模组的缸体固定在台体上,升降板滑配连接在台体上,升降板固定在升降线性模组的滑座上。3.根据权利要求1所述的工件自动放件冲孔装置,其特征在于:所述吸工件机构一(5)由直线支架(51)、连接杆(52)、吸盘一(53)组成,直线支架(51)固定在多轴机器人一(4)上,直线支架(51)两端分别固定有连接杆(52),连接杆(52)上依次固定有数个吸盘一(53)。4.根据权利要求1所述的工件自动放件冲孔装置,其特征在于:所述吸工件机构二(7)由矩形框架(71)、吸盘二(72)组成,两个矩形框架(71)固定在多轴机器人二(6)上,矩形框架(71)上固定有数个吸盘二(72)。
技术总结
本实用新型涉及工件加工设备领域,尤其是工件自动放件冲孔装置。该装置包括工件加工室、工件升降台、定位平台、多轴机器人一、吸工件机构一、多轴机器人二、吸工件机构二、CCD工业相机,所述工件升降台、定位平台、多轴机器人一、多轴机器人二、CCD工业相机均安装在工件加工室内,多轴机器人二上安装有吸工件机构二,多轴机器人一上安装有吸工件机构一。本实用新型通过工件升降台将工件抬升到取料高度。通过多轴机器人一及吸工件机构一将工件放置到定位平台上。通过多轴机器人二及吸工件机构二将工件放入冲孔机内。通过CCD工业相机判断工件的朝向。本申请提高了工件放板的工作效率,提高了定位精度。高了定位精度。高了定位精度。
技术研发人员:赵红军 辛贺义
受保护的技术使用者:昆山可立维机电有限公司
技术研发日:2021.05.28
技术公布日:2022/6/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1