复杂曲面自动倒棱装置的制作方法
1.本实用新型涉及复杂曲面自动倒棱装置。
背景技术:
2.螺旋齿轮在加工出来后,需要对轮齿两侧棱边进行倒棱,以消除齿顶毛刺,防止齿轮啮合时齿面出现刮伤,当前倒棱方式是钳工使用打磨机手工倒棱,这种倒棱方式不仅效率低,而且打磨产生的粉尘会影响工人健康。
技术实现要素:
3.本实用新型要解决的技术问题是提供复杂曲面自动倒棱装置,能够高效对工件进行倒棱。
4.为了解决上述问题,本实用新型的技术方案为:
5.复杂曲面自动倒棱装置,包括倒棱房,倒棱房上设有房门、进出口和观察窗,还包括多台直线滑台,直线滑台一端穿过进出口进入到倒棱房内,在直线滑台滑块上安装有卡盘,在倒棱房内设置有机器人,在机器人手部连接有动力头,在动力头上安装有第一视觉相机。
6.本实用新型的有益效果为:直线滑台将固定在卡盘上的螺旋齿轮送入到倒棱房,倒棱房内的第一视觉相机对螺旋齿轮进行拍摄,并将拍摄照片传送给电脑,由电脑控制机器人对螺旋齿轮进行倒棱,实现螺旋齿轮倒棱自动化,同时整个倒棱工序是在一个封闭空间内,有效的阻止了粉尘外溢。
附图说明
7.下面结合附图对本实用新型做进一步的说明:
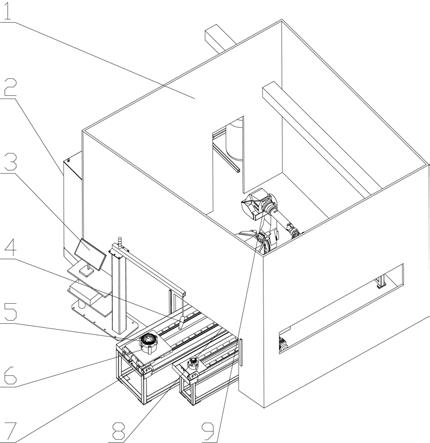
8.图1为本实用新型的结构示意图;
9.图2为本实用新型的结构示意图,图中倒棱房未显示;
10.图3为本实用新型关于机器人的结构示意图。
11.图中:倒棱房1、电器柜2、电脑3、第二视觉相机4、螺旋齿轮5、卡盘6、直线滑台7、进出口8、机器人9、动力头10、风帘11、刀架12、空气除尘器13、第一视觉相机14。
具体实施方式
12.如图1到3所示,复杂曲面自动倒棱装置,包括倒棱房1,倒棱房1上设有房门、进出口8和观察窗,还包括多台直线滑台7,直线滑台7一端穿过进出口8进入到倒棱房1内,在直线滑台7滑块上安装有自动卡盘6,在倒棱房1内设置有机器人9,在机器人9手部连接有动力头10,动力头10上装配研磨头,在动力头10上安装有第一视觉相机14,在倒棱房1外设有电气柜和电脑,用于控制机器人9的控制器设置在电器柜内,电脑与电器柜内控制器连接通讯,第一视觉相机14将拍摄到照片传送给电脑,电脑通过控制器控制机器人9、动力头10和
直线滑台7。
13.其中机器人9是采用fanuc清洗专用型六轴机器人9,品牌fanucm-710ic/50,机器人9抓持动力头10完成零件磨削工作,同时机器人9配备1台tp示教器,用于维修时调整及编程。
14.动力头10采用日本nakanishi电主轴nr3060-aqc,同时推荐采用径向浮动自动换刀电主轴,可实现自动换刀,浮动形式:c型;浮动范围:360
°±
10mm;浮动压力,10-150n;动力:电动;功率:1.5kw;自由转速,12000rpm;夹头:φ6mm;电压:3*380v;冷却:水冷;耗材最大直径:75mm;重量8.5kg;标配精密减压阀一个;变频器一个;电缆5米。
15.自动卡盘6为气动卡盘6,用于控制气动卡盘6的电磁阀连接控制器。
16.第一视觉相机14为2d视觉相机,2d相机随着机器人9手部一起运动,扩大了寻找工件的范围;电脑内视觉系统通过拍照时机器人9的位置获得相机拍照位置,可以计算出工件在平面内的位置,通过对同一个螺旋齿轮不同部位进行多次拍照获取工件上多个点的位置信息,机器人9抓取着2d视觉相机到夹具上工件侧拍照,获取偏差补正,抓取偏差补正技术适用于工件在手爪中不能保持精确位置的场合。
17.本实用新型的工艺流程为:人工上料齿轮
→
启动按钮、自动卡爪夹紧螺旋齿轮
→
成像系统扫描螺旋齿轮
→
直线滑台7驱动螺旋齿轮移动到打磨工位
→
到位检测
→
机器人9打磨系统工作
→
空气除尘器13启动
→
完成后螺旋齿轮移动到上下料位
→
人工取出打磨好的零件,放入料架。
18.在进出口8设有风帘11。风帘11能够防止打磨粉尘从进出口8外溢。
19.还包括空气除尘器13,空气除尘器13连通倒棱房1。空气除尘器13为湿式除尘器,减少倒棱房1内粉尘。
20.在倒棱房1内设有刀架12。刀架12用来放置刀具,配合机器人9自动换刀。
21.在倒棱房1外设有第二视觉相机4,第二视觉相机4位于直线滑台7上方。第二视觉相机4为3d视觉相机,工件夹紧定位后拍照,生成数据, 数据传输到系统,与数模参数确认并规划加工路径。
技术特征:
1.复杂曲面自动倒棱装置,包括倒棱房(1),倒棱房(1)上设有房门、进出口(8)和观察窗,其特征在于:还包括多台直线滑台(7),直线滑台(7)一端穿过进出口(8)进入到倒棱房(1)内,在直线滑台(7)滑块上安装有卡盘(6),在倒棱房(1)内设置有机器人(9),在机器人(9)手部连接有动力头(10),在动力头(10)上安装有第一视觉相机(14)。2.根据权利要求1所述的复杂曲面自动倒棱装置,其特征在于:在进出口(8)设有风帘(11)。3.根据权利要求1所述的复杂曲面自动倒棱装置,其特征在于:还包括空气除尘器(13),空气除尘器(13)连通倒棱房(1)。4.根据权利要求1所述的复杂曲面自动倒棱装置,其特征在于:在倒棱房(1)内设有刀架(12)。5.根据权利要求1所述的复杂曲面自动倒棱装置,其特征在于:在倒棱房(1)外设有第二视觉相机(4),第二视觉相机(4)位于直线滑台(7)上方。
技术总结
复杂曲面自动倒棱装置,包括倒棱房,倒棱房上设有房门、进出口和观察窗,还包括多台直线滑台,直线滑台一端穿过进出口进入到倒棱房内,在直线滑台滑块上安装有卡盘,在倒棱房内设置有机器人,在机器人手部连接有动力头,在动力头上安装有第一视觉相机。本实用新型能够高效对工件进行倒棱。高效对工件进行倒棱。高效对工件进行倒棱。
技术研发人员:江艳秋 张健 冯世亮
受保护的技术使用者:宜昌英汉超声电气有限公司
技术研发日:2021.10.22
技术公布日:2022/4/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1