新能源汽车电池框机器人工作站的制作方法
1.本实用新型涉及新能源汽车电池框机器人工作站,属于电池框组装技术领域。
背景技术:
2.新能源电池所用的电池框,一般主要利用焊接的方式进行固定,然而在焊接的同时,需要对电池框所用的板材进行固定,但是传统的定位方式往往是根据电池框上的板材宽度进行单独的定制,为此,不能满足多种宽度的电池框板材焊接要求,从而,需要设计一种新能源汽车电池框机器人工作站来解决上述问题。
技术实现要素:
3.本实用新型针对上述背景技术所提及的技术问题,而采用以下技术方案来实现:
4.新能源汽车电池框机器人工作站,包括底板,所述底板的顶部安装有带有焊枪的机械臂,所述底板的顶部还安装有工作台,所述工作台位于机械臂的一侧,且当机械臂伸长时,所述机械臂上的焊枪,与相对于机械臂距离最远的工作台的顶部一侧相对应,所述工作台的顶部固定安装有多对固定柱,所述工作台上还分别通过驱动组件安装有多对活动柱,且每对所述活动柱与每对固定柱的一侧,用于限制电池框框体。
5.作为优选实例,所述固定柱的对数为三对,每对固定柱的个数为两个,所述活动柱的对数为五对,每对活动柱的个数也为两个。
6.作为优选实例,三对固定柱之间的距离均相等。
7.作为优选实例,其中两对活动柱位于工作台顶部其中一条中轴线的两侧,另三对活动柱中的每对活动柱与相邻的固定柱在工作台上相错设置。
8.作为优选实例,所述驱动组件为气缸,所述工作台的顶部开设有与活动柱相匹配的腰型孔,且所述活动柱套接在腰型孔中,所述工作台的内部设有空腔,且所述空腔与腰型孔相连通,所述气缸的固定端安装在空腔的内部,所述气缸的输出端安装有圆形环,所述圆形环套住活动柱。
9.本实用新型的有益效果是:本装置主要通过驱动组件来驱动活动柱在工作台的腰型孔内运动,从而使得活动柱与固定柱之间的相对距离发生改变,以此来满足不同宽度的电池框所需板材的固定要求,从而可以利用带有焊枪的机械臂对不同宽度要求的电池框进行焊接的目的。
附图说明
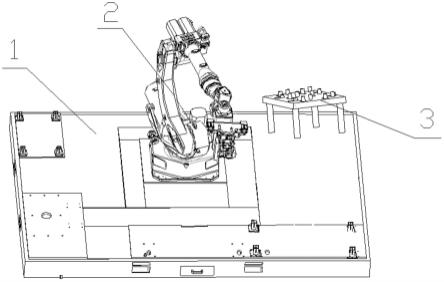
10.图1为本实用新型的结构示意图;
11.图2为本实用新型中工作台的结构示意图;
12.图3为本实用新型中工作台的俯视图;
13.图4为本实用新型中电池框框体的结构示意图;
14.图中:底板1、机械臂2、工作台3、固定柱4、腰型孔5、活动柱6、气缸7、电池框框体8。
具体实施方式
15.为了对本实用新型的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
16.如图1-4所示,新能源汽车电池框机器人工作站,包括底板1,底板1的顶部安装有带有焊枪的机械臂2,底板1的顶部还安装有工作台3,工作台3位于机械臂2的一侧,且当机械臂2伸长时,机械臂2上的焊枪,与相对于机械臂2距离最远的工作台3的顶部一侧相对应,工作台3的顶部固定安装有多对固定柱4,工作台3上还分别通过驱动组件安装有多对活动柱6,且每对活动柱6与每对固定柱4 的一侧,用于限制电池框框体8。
17.固定柱4的对数为三对,每对固定柱4的个数为两个,活动柱6 的对数为五对,每对活动柱6的个数也为两个。
18.三对固定柱4之间的距离均相等。
19.其中两对活动柱6位于工作台3顶部其中一条中轴线的两侧,另三对活动柱6中的每对活动柱6与相邻的固定柱4在工作台3上相错设置。
20.驱动组件为气缸7,工作台3的顶部开设有与活动柱6相匹配的腰型孔5,且活动柱6套接在腰型孔5中,工作台3的内部设有空腔,且空腔与腰型孔5相连通,气缸7的固定端安装在空腔的内部,气缸 7的输出端安装有圆形环,圆形环套住活动柱6。
21.工作原理:本装置主要通过驱动组件来驱动活动柱6在工作台3 的腰型孔5内运动(主要是启动气缸7,气缸7的输出端开始伸长或缩短,从而带动圆形环的运动,继而带动活动柱6的运动),从而使得活动柱6与固定柱4之间的相对距离发生改变,以此来满足不同宽度的电池框框体8所需板材的固定要求,从而可以利用带有焊枪的机械臂2对不同宽度要求的电池框框体8进行焊接的目的。
22.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.新能源汽车电池框机器人工作站,包括底板(1),所述底板(1)的顶部安装有带有焊枪的机械臂(2),其特征在于:所述底板(1)的顶部还安装有工作台(3),所述工作台(3)位于机械臂(2)的一侧,且当所述机械臂(2)伸长时,所述机械臂(2)上的焊枪,与相对于机械臂(2)距离最远的工作台(3)的顶部一侧相对应,所述工作台(3)的顶部固定安装有多对固定柱(4),所述工作台(3)上还分别通过驱动组件安装有多对活动柱(6),且每对所述活动柱(6)与每对固定柱(4)的一侧,用于限制电池框框体(8)。2.根据权利要求1所述的新能源汽车电池框机器人工作站,其特征在于:所述固定柱(4)的对数为三对,每对固定柱(4)的个数为两个,所述活动柱(6)的对数为五对,每对活动柱(6)的个数也为两个。3.根据权利要求2所述的新能源汽车电池框机器人工作站,其特征在于:三对固定柱(4)之间的距离均相等。4.根据权利要求2所述的新能源汽车电池框机器人工作站,其特征在于:其中两对活动柱(6)位于工作台(3)顶部其中一条中轴线的两侧,另三对活动柱(6)中的每对活动柱(6)与相邻的固定柱(4)在工作台(3)上相错设置。5.根据权利要求1-4任意一项所述的新能源汽车电池框机器人工作站,其特征在于:所述驱动组件为气缸(7),所述工作台(3)的顶部开设有与活动柱(6)相匹配的腰型孔(5),且所述活动柱(6)套接在腰型孔(5)中,所述工作台(3)的内部设有空腔,且所述空腔与腰型孔(5)相连通,所述气缸(7)的固定端安装在空腔的内部,所述气缸(7)的输出端安装有圆形环,所述圆形环套住活动柱(6)。
技术总结
本实用新型公开了新能源汽车电池框机器人工作站,属于电池框组装技术领域。它包括底板,底板的顶部安装有带有焊枪的机械臂,底板的顶部还安装有工作台,工作台位于机械臂的一侧,且当机械臂伸长时,机械臂上的焊枪,与相对于机械臂距离最远的工作台的顶部一侧相对应,工作台的顶部固定安装有多对固定柱,工作台上还分别通过驱动组件安装有多对活动柱,且每对活动柱与每对固定柱的一侧,用于限制电池框框体。本装置主要通过驱动组件来驱动活动柱在工作台的腰型孔内运动,从而使得活动柱与固定柱之间的相对距离发生改变,以此来满足不同宽度的电池框所需板材的固定要求,从而可以利用带有焊枪的机械臂对不同宽度要求的电池框进行焊接的目的。焊接的目的。焊接的目的。
技术研发人员:田湘
受保护的技术使用者:上海伟晟自动化焊接技术有限公司
技术研发日:2021.11.22
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1