焊接机器人用快速锐角夹钳的制作方法
1.本发明涉及一种机器人焊接夹具,更具体地说,尤其涉及一种焊接机器人用快速锐角夹钳。
背景技术:
2.夹具是指机械制造过程中用来固定加工对象,使之占有正确的位置,以接受施工或检测的装置。随着自动焊接技术发展,机器人自动焊接夹具应用越来越广泛,在对一些大型工件进行焊接时,需要对工件既能定位修正,还能不影响其焊接,若采用普通的焊接夹具来固定,夹紧力度不够,难以将工件准确定位,直接影响了焊接效率和焊接质量。
技术实现要素:
3.本发明的目的在于针对上述现有技术的不足,提供一种焊接机器人用快速锐角夹钳,夹紧力大,在牢固夹紧工件的同时还能修正定位,而且还不会影响被夹工件的焊接。
4.为实现上述目的,本发明采用的技术方案是:一种焊接机器人用快速锐角夹钳,包括底座,所述底座一端安装有快速推夹,另一端安装有尖嘴夹钳,所述尖嘴夹钳由固定钳体、活动钳体、以及连接在固定钳体与活动钳体之间的复位弹簧构成,所述固定钳体与底座固定连接,所述活动钳体通过台阶螺钉与底座活动连接,且活动钳体与快速推夹的夹头固定连接。
5.本发明结构简单,安装方便,制作成本低,操作时只需压紧快速推夹,即可使尖嘴夹钳夹住工件,其夹紧力大,在牢固夹紧工件的同时还能修正定位,而且还不会影响被夹工件的焊接,干涉小。
附图说明
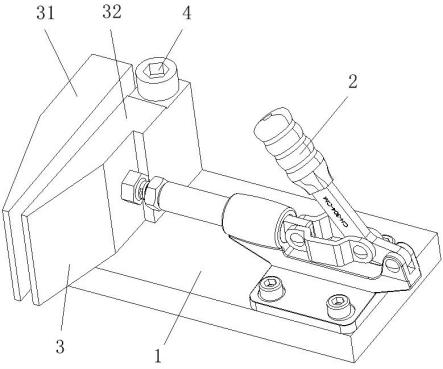
6.图1是本发明的结构示意图;图2是本发明在微开启状态下的俯视图;图3是本发明中待焊接零件的结构示意图;图4是本发明在工作时的结构示意图。
7.图中:1-底座;2-快速推夹;3-尖嘴夹钳;31-固定钳体;32-活动钳体;33-复位弹簧;4-台阶螺钉;5-连接头;6-l形薄板;7-矩形方管。
具体实施方式
8.下面结合附图中的实施例对本发明作进一步的详细说明,但并不构成对本发明的任何限制。
9.如图1和图2所示,本发明提供的一种焊接机器人用快速锐角夹钳,包括底座1,所述底座1一端安装有快速推夹2,另一端安装有尖嘴夹钳3,所述尖嘴夹钳3由固定钳体31、活动钳体32、以及连接在固定钳体31与活动钳体32之间的复位弹簧33构成,所述固定钳体31
与底座1固定连接,所述活动钳体32通过台阶螺钉4与底座1活动连接,且活动钳体32与快速推夹2的夹头固定连接。
10.如图3和图4所示,是采用本发明夹钳进行辅助焊接的示意图,目的是要将连接头5、l形薄板6和矩形方管7三个零件焊接在一起。在焊接前,先将l形薄板6和矩形方管7在工位上固定好,然后开启快速推夹2,使活动钳体32微微张开,此时可以将连接头5从尖嘴夹钳3打开的间隙中插入,敲击连接头5到位后,压紧快速推夹2,连接头5的位置被快速推夹2和活动钳体32巨大的压力推动,紧贴固定钳体32,自动修正后夹紧。虽然连接头5被尖嘴夹钳3牢牢夹紧,但依然留有足够的施焊空间,方便机器人在连接头5四周(如图3中a处焊缝位置)进行施焊,焊接完成时,轻轻松开快速推夹2,活动钳体32在复位弹簧33的作用下会迅速松开被夹住的工件,方便取出焊接完成的产品。
11.本发明结构简单,安装方便,制作成本低,操作时只需压紧快速推夹2,即可使尖嘴夹钳3夹住工件,其夹紧力大,在牢固夹紧工件的同时还能修正定位,而且还不会影响被夹工件的焊接,干涉小。
技术特征:
1.一种焊接机器人用快速锐角夹钳,其特征在于:包括底座,所述底座一端安装有快速推夹,另一端安装有尖嘴夹钳,所述尖嘴夹钳由固定钳体、活动钳体、以及连接在固定钳体与活动钳体之间的复位弹簧构成,所述固定钳体与底座固定连接,所述活动钳体通过台阶螺钉与底座活动连接,且活动钳体与快速推夹的夹头固定连接。
技术总结
本发明公开了一种焊接机器人用快速锐角夹钳,包括底座,所述底座一端安装有快速推夹,另一端安装有尖嘴夹钳,所述尖嘴夹钳由固定钳体、活动钳体、以及连接在固定钳体与活动钳体之间的复位弹簧构成,所述固定钳体与底座固定连接,所述活动钳体通过台阶螺钉与底座活动连接,且活动钳体与快速推夹的夹头固定连接。本发明结构简单,安装方便,制作成本低,操作时只需压紧快速推夹,即可使尖嘴夹钳夹住工件,其夹紧力大,在牢固夹紧工件的同时还能修正定位,而且还不会影响被夹工件的焊接,干涉小。干涉小。干涉小。
技术研发人员:谢健峰
受保护的技术使用者:厚福医疗装备有限公司
技术研发日:2022.10.11
技术公布日:2023/3/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1