一种航天发动机导管矫形方法
本发明属于航天管路对接领域,具体说是一种航天发动机导管矫形方法。
背景技术:
1、导管组成的管路组件承担着发动机推进剂的输送、各系统气动控制及吹除等功能。任何管路的泄露或破裂都会对火箭发动机造成重大影响,甚至导致火箭发射的失败。由于发动机上的导管接口一般都为焊接加工,难以保证位置精度,并且导管均为提前批产,因此导管与发动机上的接口经常出现不匹配的问题,需要对导管进行矫形才能顺利完成装配。
2、目前的生产模式为工人将导管与发动机接口进行现场比试,根据观察及经验对各个折弯处进行开弯或者收弯,比试完成后对导管进行标记,按照标记位置切割,切割后再次比对,直到合适为止。
技术实现思路
1、本发明目的是提供一种航天发动机导管矫形方法,能够通过测量实际接口位置和导管形状,自动计算出矫形参数,给出矫形方案。避免工人反复比试的重复工作。提高生产效率。
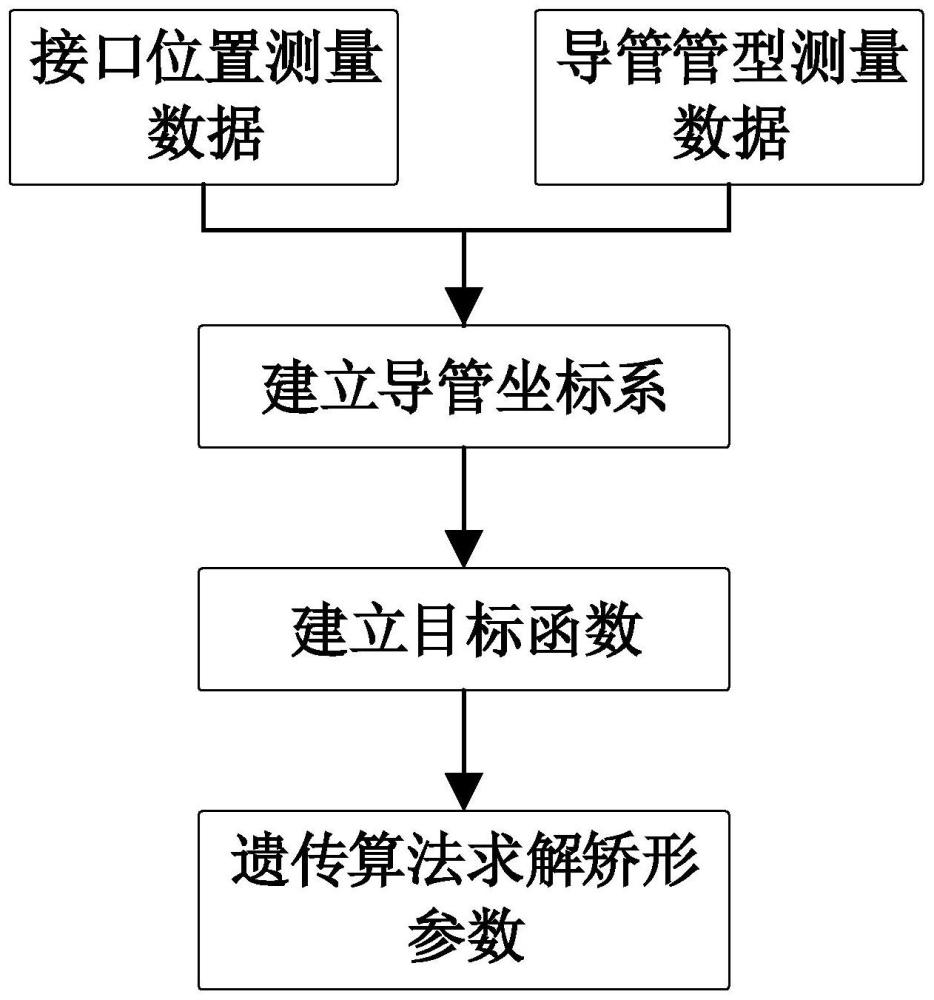
2、本发明为实现上述目的所采用的技术方案是:一种航天发动机导管矫形方法,包括以下步骤:
3、1)测量航天发动机导管,并根据得到的接口位置测量数据以及导管管型测量数据,确定航天发动机导管的装配位置;
4、2)建立该位置的航天发动机导管的导管坐标系;
5、3)根据航天发动机导管四参数法,确定航天发动机导管的各连杆转矩矩阵,以将相对于航天发动机导管的坐标转换为相对于导管坐标系的坐标;
6、4)根据航天发动机导管的连杆转矩矩阵,建立装配目标函数;
7、5)通过遗传算法对装配目标函数进行求解,获取矫形参数;根据矫形参数,对导管实现矫形。
8、通过线激光扫描测量获取接口位置测量数据,即导管接口的空间位置;通过视觉测量法获取导管的空间几何形状,进而获取导管管型测量数据,将导管一端与接口重合,另一端设于接口位置附近设定位置,进而确定航天发动机导管的位置。
9、所述步骤2),包括以下步骤:
10、找出航天发动机导管的各折弯点处的关节轴,并标出关节轴轴线的延长线,对于两个相邻的关节轴轴线,即:关节轴i和i+1。
11、2-1)找出关节轴i和关节轴i+1之间的公垂线、或找出关节轴i和i+1的交点,以关节轴i和关节轴i+1的交点或公垂线与关节轴i的交点作为连杆坐标系{i}的原点;
12、2-2)规定连杆坐标系{i}的zi轴沿关节轴i的指向;
13、2-3)规定连杆坐标系{i}的xi轴沿公垂线的指向;
14、如果关节轴i和i+1相交,则规定连杆坐标系{i}的xi轴垂直于关节轴i和关节轴i+1所在的平面;
15、2-4)根据右手定则确定连杆坐标系{i}的yi轴;
16、2-5)当第一个关节变量为0时,规定坐标系{0}和{1}重合;对于坐标系{n},其原点和xn的方向取任意点。并限定选取该点的约束条件为连杆参数为0。
17、所述步骤3)具体为:
18、根据dh参数法,获取各连杆的dh参数,进而获取各连杆的转换矩阵,如下:
19、
20、其中,t为关节轴i和关节轴i+1之间的连杆的转矩矩阵,θn为绕关节轴i和关节轴i+1的公共轴线的关节角,dn为连杆i+1的连杆偏距,αn为关节轴i到关节轴i+1的连杆转角,a为关节轴i和关节轴i+1之间沿着轴线的距离。
21、所述建立装配目标函数为:
22、f1(θ1,θ2,θ3...θn)=arccos(l1,l2)
23、
24、其中,l1为导管末端直线段的方向向量,l2为发动机上导管接口的方向向量,为导管末端点到接口端点的向量,θ1为绕关节轴0和关节轴1的公共轴线的关节角,θ2为绕关节轴1和关节轴2的公共轴线的关节角,θ3为绕关节轴2和关节轴3的公共轴线的关节角,θn为绕关节轴i和关节轴i+1的公共轴线的关节角。
25、所述步骤5),具体为:
26、将[θ1、θ2、θ3……θn]构成染色体基因,装配目标函数作为适应度,通过nsga-ⅱ遗传算法获取最终的种群,并找出与目前关节角相比,变化最小的一组解,即得到矫形参数,即最终需要的关节角[θ1、θ2、θ3……θn];
27、根据矫形参数,采用弯管机设备按照矫形参数对导管进行开弯或者收弯实现矫形。
28、本发明具有以下有益效果及优点:
29、1.本发明能够给出明确的矫形指导,定量的计算出需要矫形的角度。
30、2.解决了由于批产导管与发动机接口不匹配造成的装配效率低下的问题,提高生产效率。
31、3.替代了人工手动反复比对的生产过程,解决了矫形环节严重依赖人工经验的问题。
技术特征:
1.一种航天发动机导管矫形方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种航天发动机导管矫形方法,其特征在于,通过线激光扫描测量获取接口位置测量数据,即导管接口的空间位置;通过视觉测量法获取导管的空间几何形状,进而获取导管管型测量数据,将导管一端与接口重合,另一端设于接口位置附近设定位置,进而确定航天发动机导管的位置。
3.根据权利要求1所述的一种航天发动机导管矫形方法,其特征在于,所述步骤2),包括以下步骤:
4.根据权利要求1所述的一种航天发动机导管矫形方法,其特征在于,所述步骤3)具体为:
5.根据权利要求1所述的一种航天发动机导管矫形方法,其特征在于,所述建立装配目标函数为:
6.根据权利要求1所述的一种航天发动机导管矫形方法,其特征在于,所述步骤5),具体为:
技术总结
本发明属于航天管路对接领域,具体说是一种航天发动机导管矫形方法,包括以下步骤:1)测量航天发动机导管,并根据得到的接口位置测量数据以及导管管型测量数据,确定航天发动机导管的装配位置;2)建立该位置的航天发动机导管的导管坐标系;3)根据航天发动机导管四参数法,确定航天发动机导管的各连杆转矩矩阵,以将相对于航天发动机导管的坐标转换为相对于导管坐标系的坐标;4)根据航天发动机导管的连杆转矩矩阵,建立装配目标函数;5)通过遗传算法对装配目标函数进行求解,获取矫形参数;根据矫形参数,对导管实现矫形。
技术研发人员:杜劲松,孙宏浩,郭锐,杨旭,王伟
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!