一种自动料仓装置及刀盘更换系统的制作方法
本发明属于机械加工,特别是涉及一种自动料仓装置及刀盘更换系统。
背景技术:
1、随着自动化技术的不断进步,越来越多的数控机床应用到加工厂中;数控机床对待加工件进行加工的过程中,需要根据不同的加工工艺更换不同的刀具,且一种刀具使用到较长时间后,也需要更换成新的刀具。因此,数控机床上通常配置有刀盘,一个刀盘通常可以存放多个刀具,其中包括不同型号的刀具;数控机床的加工主轴可以根据实际需求从所述刀盘中更换不同的刀具。
2、料架上设有多个储存空间。每一层储存空间中都可储存一个或多个刀盘;由于刀盘在料架上的位置(高度)不同,由于机械手的夹爪活动空间有限,夹爪定位的精度有限,从而机械手的夹爪很难实现从不同的高度或不同的位置夹取刀盘;从而现有技术中,刀盘通常是由人工放置到数控机床上的,或者从数控机床上取下的料盘由人工存放到料仓中;这种人工更换刀盘的模式,存在着工作效率低、人工成本高的问题。
技术实现思路
1、本发明针对现有技术中人工更换刀盘的模式,存在着工作效率低、人工成本高的技术问题,提供了一种自动料仓装置及刀盘更换系统。
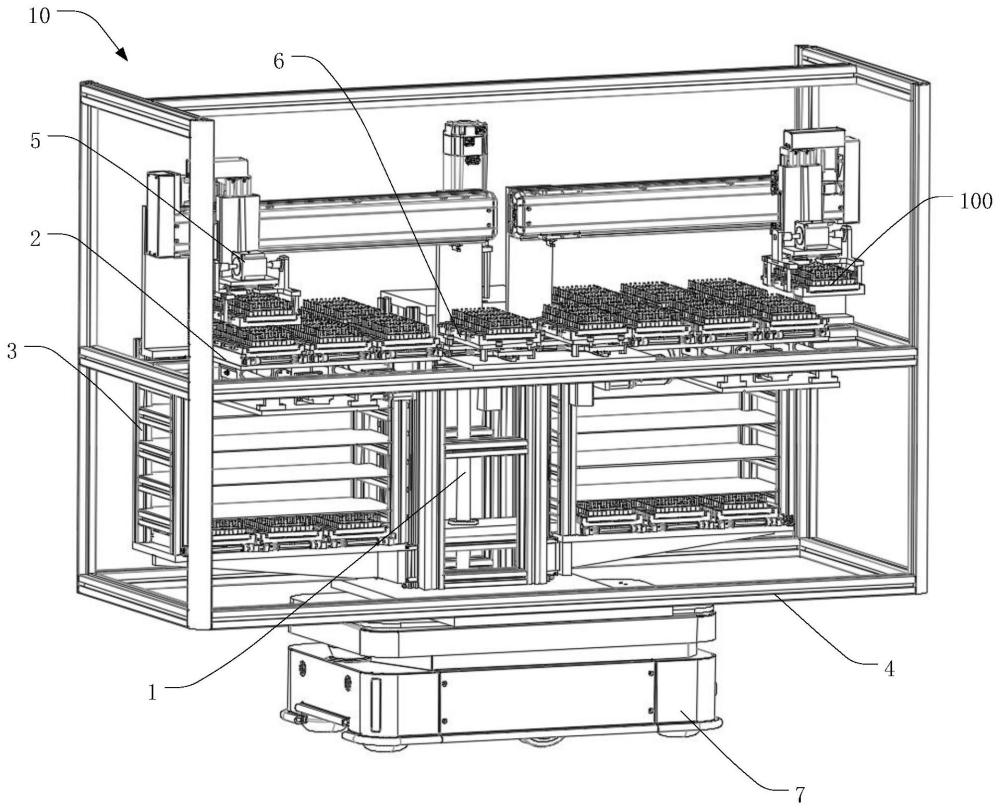
2、鉴于以上技术问题,本发明实施例提供一种自动料仓装置,包括升降机构、移栽机构以及料仓机构;所述料仓机构包括储料仓和多个输送组件,所述储料仓上设有间隔分布的多个安装空间,每个所述安装空间中均安装有所述输送组件;所述输送组件包括第一齿轮以及第一输送件,所述第一齿轮连接所述第一输送件;
3、所述移栽机构包括储料台、第二齿轮以及均安装在所述储料台上的驱动件、第三齿轮和第二输送件,所述驱动件连接所述第二输送件,所述第二齿轮安装在所述第二输送件上,所述第二齿轮与所述第三齿轮啮合;
4、所述升降机构连接所述储料仓,用于带动所述储料仓升降;
5、当所述升降机构带动所述储料仓移动,直至所述第一齿轮与所述第三齿轮啮合时,所述第一输送件与所述第二输送件对接,所述第一输送件将待搬运件输送至所述第二输送件上,或者所述第二输送件将待搬运件输送至所述第一输送件上。
6、可选地,所述第一输送件包括第一皮带辊、第二皮带辊以及套接在所述第一皮带辊和所述第二皮带辊之间的第一传输带;所述第一皮带辊和所述第二皮带辊均转动安装在所述储料仓上,所述第一齿轮套接在所述第一皮带辊上;
7、所述第二输送件包括第三皮带辊、第四皮带辊以及套接在所述第三皮带辊和所述第四皮带辊之间的第二传输带;所述第三皮带辊和所述第四皮带辊均转动安装在所述储料台上,所述第二齿轮套接在所述第三皮带辊上;
8、当所述升降机构带动所述储料仓移动,直至所述第一齿轮与所述第三齿轮啮合时,所述第一传输带与所述第二传输带对接。
9、可选地,所述安装空间中设有间隔分布的多个第一输送槽,每个所述第一输送槽中均设有所述第一传输带;所述储料台上设有间隔分布的多个第二输送槽,每一个所述第二输送槽中均设有所述第二传输带;
10、当所述升降机构带动所述储料仓移动,直至所述第一齿轮与所述第三齿轮啮合时,所述第一输送槽连通所述第二输送槽。
11、可选地,所述自动料仓装置还包括机架、夹爪机械手以及定位机构;所述储料台、所述升降机构、所述夹爪机械手以及所述定位机构均安装在所述机架上;
12、所述夹爪机械手用于将所述第一输送件上的待搬运件搬运至所述定位机构上,或者将所述定位机构上的待搬运件搬运至所述第一输送件上;所述定位机构用于定位待搬运件。
13、可选地,所述定位机构包括旋转驱动件、转盘以及滑动安装在所述机架上的多个夹臂,所述转盘上设有围绕转轴布置的多个弧形槽,所述夹臂上设有插入所述弧形槽的插接部;所述旋转驱动件连接所述转盘,用于带动所述转盘转动;所述转盘用于通过插入所述弧形槽中的所述插接部带动多个所述夹臂张合。
14、可选地,所述定位机构还包括导轨和滑动连接在所述导轨上的滑块,所述导轨安装在所述机架上,所述滑块安装在所述夹臂上。
15、可选地,所述夹爪机械手包括安装在所述机架上的驱动模组以及安装在所述驱动模组上的第一夹爪组件;所述驱动模组用于驱动所述第一夹爪组件移动,所述第一夹爪组件用于夹持或释放待输送件。
16、可选地,所述自动料仓装置还包括运输车,所述机架安装在所述运输车上。
17、本发明另一实施例还提供了一种刀盘更换系统,包括搬运装置和上述的自动储料仓装置;所述搬运装置用于将所述定位机构上的待搬运件搬运至外部工作台上,或者将外部工作台上的所述待搬运件搬运至所述定位机构上。
18、可选地,所述搬运装置包括搬运机械手以及均安装在所述搬运机械手上的相机和第二夹爪组件。
19、本发明中,所述升降机构带动所述储料仓上下移动,所述储料仓的一层所述安装空间中的第一齿轮移动至与所述第三齿轮啮合时,所述驱动件驱动所述第二输送件移动的同时,还顺次通过所述第二齿轮、所述第三齿轮以及所述第一齿轮带动所述第一输送件移动,且此时所述第一输送件与所述第二输送件对接,从而待搬运件可以被所述第一输送件输送至所述第二输送件上,或者待搬运件可以被所述第二输送件输送至所述第一输送件上。
20、当与所述第二输送件对接的第一输送件上储存有更换下来的待搬运件后,所述升降机构驱动所述储料仓移动,使得空的所述安装空间的所述第一输送件与所述移栽机构的第二输送件对接,所述第二输送件可以将下一个旧的待搬运件输送至空的所述安装空间对应的所述第一输送件上。
21、当与所述第二输送件对接的第一输送件上将其上的待搬运件输送至所述第二输送件上后(与所述第二输送件对接的第一输送件处于空置状态),所述升降机构驱动所述储料仓移动,使得储料仓的下一层安装有待搬运件的第一输送件与所述移栽机构的第二输送件对接,使得所述储料仓可以将下一层的待搬运件逐个输送至所述移栽机构上。
22、本发明中,所述移栽机构可以在固定的位置将待搬运件输送至所述储料仓的每层的所述安装空间中,也可以在固定的位置接收所述储料仓每层输送的待输送件,从而外部机械手可以在固定的位置夹持所述移栽机构上的待搬运件,或者将所述待搬运件放置在所述移栽机构上;该自动料仓装置可以应用于数控机床的上下料或刀具盘的更换,提高了数控机床的换刀效率,降低了换刀成本。并且所述储料仓可以自动存储待搬运件,提高了待搬运件的储存效率。此外,通过所述第一齿轮与所述第三齿轮的啮合或脱离,所述驱动件可以同时驱动所述第一输送件和所述第二输送件移动,以移送待搬运件,降低了该自动料仓装置的制造成本。
技术特征:
1.一种自动料仓装置,其特征在于,包括升降机构、移栽机构以及料仓机构;所述料仓机构包括储料仓和多个输送组件,所述储料仓上设有间隔分布的多个安装空间,每个所述安装空间中均安装有所述输送组件;所述输送组件包括第一齿轮以及第一输送件,所述第一齿轮连接所述第一输送件;
2.根据权利要求1所述的自动料仓装置,其特征在于,所述第一输送件包括第一皮带辊、第二皮带辊以及套接在所述第一皮带辊和所述第二皮带辊之间的第一传输带;所述第一皮带辊和所述第二皮带辊均转动安装在所述储料仓上,所述第一齿轮套接在所述第一皮带辊上;
3.根据权利要求2所述的自动料仓装置,其特征在于,所述安装空间中设有间隔分布的多个第一输送槽,每个所述第一输送槽中均设有所述第一传输带;所述储料台上设有间隔分布的多个第二输送槽,每一个所述第二输送槽中均设有所述第二传输带;
4.根据权利要求1所述的自动料仓装置,其特征在于,所述自动料仓装置还包括机架、夹爪机械手以及定位机构;所述储料台、所述升降机构、所述夹爪机械手以及所述定位机构均安装在所述机架上;
5.根据权利要求4所述的自动料仓装置,其特征在于,所述定位机构包括旋转驱动件、转盘以及滑动安装在所述机架上的多个夹臂,所述转盘上设有围绕其中心轴布置的多个弧形槽,所述夹臂上设有插入所述弧形槽的插接部;所述旋转驱动件连接所述转盘,用于带动所述转盘转动;所述转盘用于通过插入所述弧形槽中的所述插接部带动多个所述夹臂张合。
6.根据权利要求5所述的自动料仓装置,其特征在于,所述定位机构还包括导轨和滑动连接在所述导轨上的滑块,所述导轨安装在所述机架上,所述滑块安装在所述夹臂上。
7.根据权利要求4所述的自动料仓装置,其特征在于,所述夹爪机械手包括安装在所述机架上的驱动模组以及安装在所述驱动模组上的第一夹爪组件;所述驱动模组用于驱动所述第一夹爪组件移动,所述第一夹爪组件用于夹持或释放待搬运件。
8.根据权利要求4所述的自动料仓装置,其特征在于,所述自动料仓装置还包括运输车,所述机架安装在所述运输车上。
9.一种刀盘更换系统,其特征在于,包括搬运装置和如权利要求4至8任意一项所述的自动料仓装置;所述搬运装置用于将所述定位机构上的待搬运件搬运至外部工作台上,或者将外部工作台上的所述待搬运件搬运至所述定位机构上。
10.根据权利要求9所述的刀盘更换系统,其特征在于,所述搬运装置包括搬运机械手以及均安装在所述搬运机械手上的相机和第二夹爪组件。
技术总结
本发明属于机械加工技术领域,特别是涉及一种自动料仓装置及刀盘更换系统。自动料仓装置包括升降机构、移栽机构以及料仓机构,当升降机构带动储料仓移动,直至储料仓一层中的第一齿轮与运载机构的第三齿轮啮合时,储料仓当前层的第一输送件与运载机构的第二输送件对接,第一输送件将待搬运件输送至第二输送件上,或者第二输送件将待搬运件输送至第一输送件上。本发明中,移栽机构可以在固定的位置将待搬运件输送至储料仓的每层的安装空间中,也可以在固定的位置接收储料仓每层输送的待输送件;该自动料仓装置可以应用于数控机床的上下料或刀具盘的更换,提高了数控机床的换刀效率,降低了换刀成本。
技术研发人员:黄福献,肖鹏华,曹鹏鹏,朱加坤,杨朝辉
受保护的技术使用者:深圳市大族数控科技股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!