基于机器学习图形自动识别的激光隐形划片装置的制作方法
本发明涉及精加工,尤其是涉及一种基于机器学习图形自动识别的激光隐形划片装置。
背景技术:
1、在现有技术中,随着光电产业的快速发展,高度集成化和高性能半导体晶圆需求不断增长,硅、碳化硅、蓝宝石、砷化镓、氮化铝、磷化铟等衬底材料广泛应用于半导体晶圆。随着晶粒尺寸越来越小、集成度越来越高以及晶圆的轻薄化,传统的机械加工方式已经不能满足生产需求。在相关技术中,晶圆在切割过程中需要在晶圆上确定mark点后,划片设备先读取晶圆上的mark点后,调用切割道文件,最终实现晶圆划片。如mark点在切割道上时,会干扰激光穿过,造成切割时的晶圆缺陷,降低切割质量。如mark点在晶圆电路上时,会占用晶圆电路位置,造成晶圆的浪费。另外,使用mark点定位方式需要在专业的集成电路设计软件中设计制作mark点,并且晶圆切割机厂家需要专业软件来提取调用mark点信息,这将增大晶圆划片的难度,并降低切割的准确度。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种激光隐形切割装置,所述激光隐形切割装置的切割效率更好、切割成本更低。
2、根据本发明实施例的基于机器学习图形自动识别的激光隐形划片装置,包括:工作台、加工装置、控制器和摄像装置,所述工作台被构造成用于承载晶圆;所述加工装置设置于所述工作台且与所述晶圆相对设置,所述加工装置被配置成可提供激光,所述激光在所述加工装置的控制下作用到所述晶圆上,以对所述晶圆进行切割;所述控制器被配置成与所述加工装置通讯连接,所述控制器用于根据所述晶圆的图像信息生成晶圆切割路线,并根据所述晶圆切割路线控制所述加工装置切割所述晶圆;所述摄像装置与所述工作台相对设置,且所述摄像装置与所述控制器通信连接,所述摄像装置用于采集所述工作台上承载的所述晶圆的图像信息,并发送至所述控制器。
3、根据本发明实施例的基于机器学习图形自动识别的激光隐形划片装置,在激光隐形切割装置中,通过使用摄像装置对晶圆进行图像识别后使用控制器对其进行分析,节省了切割工序,且让规划出的晶圆切割路线更为高效,晶圆的切割效率得到提升,且废弃部分更少,提升切割效果,降低加工成本,且激光隐形切割装置的工作过程更为高效,提升使用效率。
4、在一些实施例中,所述控制器包括:预处理模块、建模模块、训练模块和评估模块,其中,所述预处理模块和所述摄像装置通信连接,所述预处理模块接收所述摄像装置传输的所述图像信息,对所述图像信息进行预处理,得到所述晶圆的特征信息;所述建模模块用于根据所述特征信息构建对应于所述晶圆的初步数据模型;所述训练模块用于对所述初步数据模型进行训练,得到多个优化数据模型;所述评估模块用于对多个所述优化数据模型进行评估,确定目标数据模型,并将所述图像信息输入至所述目标数据模型,生成晶圆切割路线。
5、在一些实施例中,所述训练模块用于对所述初步数据模型进行训练,包括:将多个预设的晶圆电子电路切割道训练图像样本输入初步数据模型,得到对应的多个输出结果;确定各个训练图像样本的类型,训练图像样本包括正确类型或错误类型;当所述训练图像样本为错误类型时,计算对应输出切割道结果与所述训练图像样本的参数之间的互信息度量;当所述训练图像样本为正常类型时,计算对应输出切割道结果与训练图像样本的预设标签之间的差异损失;分别汇总各个互信息度量以及各个差异损失,得到互信息度量之和以及各个差异损失之和;更新训练图像样本的参数,以使互信息度量之和与所述差异损失之和变小;重复训练得到多个优化数据模型。
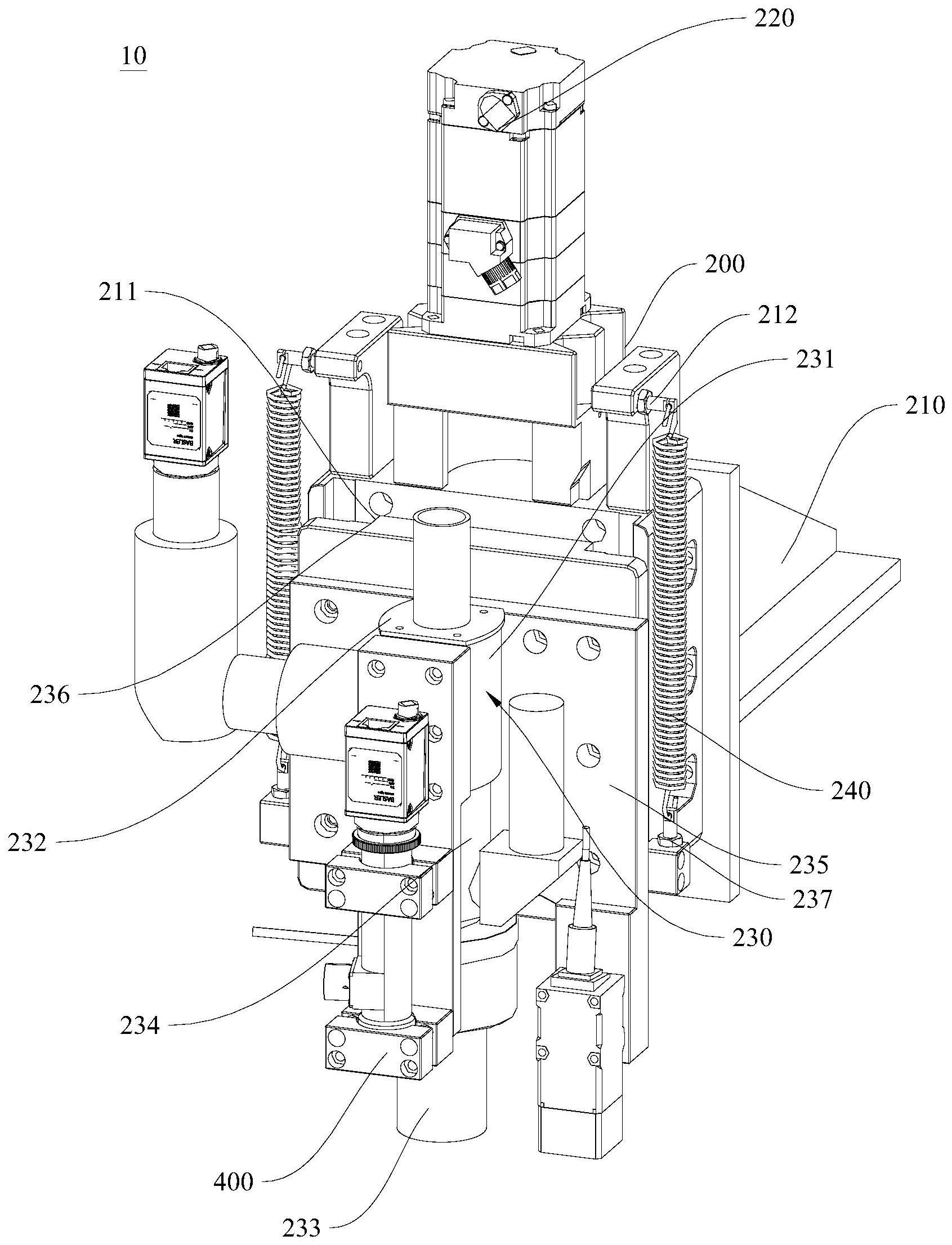
6、在一些实施例中,所述加工装置包括:安装座;驱动组件,所述驱动组件承载于所述安装座上;激光切割组件,所述激光切割组件与所述驱驱动组件传动连接,所述驱动组件驱动所述激光切割组件移动,所述激光切割组件包括激光切割头,所述激光切割头被构造成提供激光到指定位置。
7、在一些实施例中,所述驱动组件包括:第一输出组件、第二输出组件和第三输出组件,所述第一输出组件、所述第二输出组件和所述第三输出组件彼此间隔连接,所述第一输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿第一水平方向移动,所述第二输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿第二水平方向移动,所述第三输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿竖直方向移动,所述第一水平方向、所述第二水平方向和所述竖直方向彼此相互垂直。
8、在一些实施例中,所述激光切割组件还包括:承载座,所述激光切割头设于所述承载座上,所述承载座与所述第一输出组件和所述第二输出组件传动连接,所述第一输出组件与所述承载座连接以驱动所述激光切割组件沿所述第一水平方向移动,所述第二输出组件与所述承载做连接以驱动所述激光切割组件沿所述第二水平方向移动。
9、在一些实施例中,所述安装座上设有滑动轨道,所述滑动轨道沿竖直方向延伸,所述承载座上设有滑动部,所述滑动部在所述滑动轨道上抵触设置且滑动连接,所述第三输出组件与所述承载座连接以驱动所述滑动部在所述滑动轨道上沿竖直方向滑动。
10、在一些实施例中,所述加工装置还包括:弹簧,所述弹簧为多个且设于所述安装座的相对两侧,所述安装座上设有第一弹簧连接部,所述承载座上设有第二弹簧连接部,所述弹簧的一端与所述第一弹簧连接部连接,所述弹簧的另一端与所述第二弹簧连接部连接。
11、在一些实施例中,所述弹簧在自由状态下处于常拉伸状态。
12、在一些实施例中,所述摄像装置包括摄像镜头,所述摄像镜头设于所述激光切割头背离所述承载座的一侧。
13、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于机器学习图形自动识别的激光隐形划片装置,其特征在于,包括:
2.根据权利要求1所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述控制器包括:预处理模块、建模模块、训练模块和评估模块,其中,
3.根据权利要求2所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述训练模块用于对所述初步数据模型进行训练,包括:
4.根据权利要求1所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述加工装置包括:
5.根据权利要求4所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述驱动组件包括:第一输出组件、第二输出组件和第三输出组件,所述第一输出组件、所述第二输出组件和所述第三输出组件彼此间隔连接,所述第一输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿第一水平方向移动,所述第二输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿第二水平方向移动,所述第三输出组件和所述激光切割组件传动连接以驱动所述激光切割组件沿竖直方向移动,所述第一水平方向、所述第二水平方向和所述竖直方向彼此相互垂直。
6.根据权利要求5所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述激光切割组件还包括:承载座,所述激光切割头设于所述承载座上,所述承载座与所述第一输出组件和所述第二输出组件传动连接,所述第一输出组件与所述承载座连接以驱动所述激光切割组件沿所述第一水平方向移动,所述第二输出组件与所述承载做连接以驱动所述激光切割组件沿所述第二水平方向移动。
7.根据权利要求6所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述安装座上设有滑动轨道,所述滑动轨道沿竖直方向延伸,所述承载座上设有滑动部,所述滑动部在所述滑动轨道上抵触设置且滑动连接,所述第三输出组件与所述承载座连接以驱动所述滑动部在所述滑动轨道上沿竖直方向滑动。
8.根据权利要求6所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述加工装置还包括:弹簧,所述弹簧为多个且设于所述安装座的相对两侧,所述安装座上设有第一弹簧连接部,所述承载座上设有第二弹簧连接部,所述弹簧的一端与所述第一弹簧连接部连接,所述弹簧的另一端与所述第二弹簧连接部连接。
9.根据权利要求8所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述弹簧在自由状态下处于常拉伸状态。
10.根据权利要求1所述的基于机器学习图形自动识别的激光隐形划片装置,其特征在于,所述摄像装置包括摄像镜头,所述摄像镜头设于所述激光切割头背离所述承载座的一侧。
技术总结
本发明公开了一种基于机器学习图形自动识别的激光隐形划片装置,包括:工作台、加工装置、控制器和摄像装置,工作台被构造成用于承载晶圆;加工装置设置于工作台且与晶圆相对设置,加工装置被配置成可提供激光,激光在加工装置的控制下作用到晶圆上,以对晶圆进行切割;控制器被配置成与加工装置通讯连接,控制器用于根据晶圆的图像信息生成晶圆切割路线,并根据晶圆切割路线控制加工装置切割晶圆;摄像装置与工作台相对设置,且摄像装置与控制器通信连接,摄像装置用于采集工作台上承载的晶圆的图像信息,并发送至控制器。这样,由于使用摄像装置进行图像识别,能够节省了切割工序,提升切割效果,降低加工成本,提升使用效率。
技术研发人员:李纪东,易飞跃,张彪,杨顺凯,孙晓丹,李保第,张力江,闫荟羽
受保护的技术使用者:北京中科镭特电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!