一种焊接机器人的升降机构的制作方法
1.本实用新型涉及焊接机器人技术领域,具体为一种焊接机器人的升降机构。
背景技术:
2.目前,焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器,焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
3.而对于一些较大的设备,需要通过可移动式焊接机器人进行焊接,但在进行焊接的过程中,设备的顶端使操作者视野盲区,无法直接操作焊接机器人进行焊接,还需要通过提升机将操作人员升降到一定高度,才可以看到焊接位置,避免了视野盲区,因此,我们提出一种焊接机器人的升降机构。
技术实现要素:
4.本实用新型的目的在于提供一种焊接机器人的升降机构,解决了背景技术中所提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种焊接机器人的升降机构,包括移动台和控制器,所述移动台上侧安装有升降台,所述升降台前侧左右两端均活动安装有螺杆,两组所述螺杆下端均通过传动带传动连接,两组所述螺杆上均拧合连接有升降座,所述升降座下侧安装有机械臂,所述机械臂另一端安装有焊接头,所述焊接头左侧安装有摄像头,所述控制器上设置有操作按键和显示器。
6.作为本实用新型的一种优选实施方式,所述摄像头外侧安装有防护罩。
7.作为本实用新型的一种优选实施方式,所述移动台内部左侧安装有伺服电机,所述伺服电机驱动输出端与传动轴传动连接,且传动轴另一端与位于左侧的螺杆下侧固定连接。
8.作为本实用新型的一种优选实施方式,所述升降台前侧中间开设有限位槽,所述限位槽内活动连接有限位块,所述限位块前侧与所述升降座固定连接。
9.作为本实用新型的一种优选实施方式,所述摄像头信号输出端与所述控制器信号输入端连接,所述控制器信号上输出端与所述显示屏信号输入端连接。
10.与现有技术相比,本实用新型的有益效果如下:
11.1.本实用新型通过控制器驱动伺服电机转动,可以使升降座下侧的机械臂在升降台上移动,当移动到指定位置后,可以驱动焊接头左侧的摄像头传输的画像,来确定需要焊接的具体位置,从而避免了在焊接视线死角位置时,无法进行焊接。
12.2.本实用新型由于设置有限位块和限位槽,可以对升降座进行限位,保证了升降
座在移动时是竖直方向。
附图说明
13.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
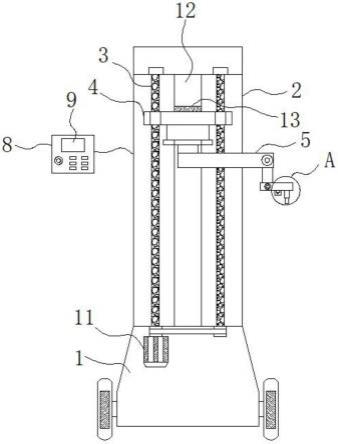
14.图1为本实用新型一种焊接机器人的升降机构的整体结构示意图;
15.图2为本实用新型一种焊接机器人的升降机构的摄像头结构示意图。
16.图中:1、移动台;2、升降台;3、螺杆;4、升降座;5、机械臂;6、焊接头;7、摄像头;8、控制器;9、显示屏;10、防护罩;11、伺服电机;12、限位槽;13、限位块。
具体实施方式
17.请参阅图1-2,本实用新型提供一种技术方案:一种焊接机器人的升降机构,包括移动台1和控制器8,其特征在于:所述移动台1上侧安装有升降台2,所述升降台2前侧左右两端均活动安装有螺杆3,两组所述螺杆3下端均通过传动带传动连接,两组所述螺杆3上均拧合连接有升降座4,所述升降座4下侧安装有机械臂5,所述机械臂5另一端安装有焊接头6,所述焊接头6左侧安装有摄像头7,所述控制器8上设置有操作按键和显示屏9,通过在移动台1、升降台2、螺杆3、升降座4、机械臂5、焊接头6、摄像头7、控制器8和显示屏9,当通过控制器8驱动伺服电机11转动,可以使升降座4下侧的机械臂5在升降台2上移动,当移动到指定位置后,可以驱动焊接头6左侧的摄像头7传输的画像,来确定需要焊接的具体位置,从而避免了在焊接视线死角位置时,无法进行焊接。
18.本实施例中,所述摄像头7外侧安装有防护罩10,可以对摄像头7进行保护。
19.本实施例中,所述移动台1内部左侧安装有伺服电机11,所述伺服电机11驱动输出端与传动轴传动连接,且传动轴另一端与位于左侧的螺杆3下侧固定连接,通过驱动伺服电机11可以带动两组螺杆3转动,使升降座4上下移动。
20.本实施例中,所述升降台2前侧中间开设有限位槽12,所述限位槽12内活动连接有限位块13,所述限位块13前侧与所述升降座4固定连接,可以对升降座4进行限位,保证了升降座4在移动时是竖直方向。
21.本实施例中,所述摄像头7信号输出端与所述控制器8信号输入端连接,所述控制器8信号上输出端与所述显示屏9信号输入端连接。
22.在一种焊接机器人的升降机构使用的时候,需要说明的是,本实用新型为一种焊接机器人的升降机构,各个部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
23.使用时,通过在移动台1、升降台2、螺杆3、升降座4、机械臂5、焊接头6、摄像头7、控制器8和显示屏9,当通过控制器8驱动伺服电机11转动,可以使升降座4下侧的机械臂5在升降台2上移动,当移动到指定位置后,可以驱动焊接头6左侧的摄像头7传输的画像,来确定需要焊接的具体位置,从而避免了在焊接视线死角位置时,无法进行焊接,同时在升降台2前侧中间开设的限位槽12内活动连接有限位块13,且限位块13前侧与升降座4固定连接,可以对升降座4进行限位,保证了升降座4在移动时是竖直方向。
技术特征:
1.一种焊接机器人的升降机构,包括移动台(1)和控制器(8),其特征在于:所述移动台(1)上侧安装有升降台(2),所述升降台(2)前侧左右两端均活动安装有螺杆(3),两组所述螺杆(3)下端均通过传动带传动连接,两组所述螺杆(3)上均拧合连接有升降座(4),所述升降座(4)下侧安装有机械臂(5),所述机械臂(5)另一端安装有焊接头(6),所述焊接头(6)左侧安装有摄像头(7),所述控制器(8)上设置有操作按键和显示屏(9)。2.根据权利要求1所述的一种焊接机器人的升降机构,其特征在于:所述摄像头(7)外侧安装有防护罩(10)。3.根据权利要求1所述的一种焊接机器人的升降机构,其特征在于:所述移动台(1)内部左侧安装有伺服电机(11),所述伺服电机(11)驱动输出端与传动轴传动连接,且传动轴另一端与位于左侧的螺杆(3)下侧固定连接。4.根据权利要求1所述的一种焊接机器人的升降机构,其特征在于:所述升降台(2)前侧中间开设有限位槽(12),所述限位槽(12)内活动连接有限位块(13),所述限位块(13)前侧与所述升降座(4)固定连接。5.根据权利要求1所述的一种焊接机器人的升降机构,其特征在于:所述摄像头(7)信号输出端与所述控制器(8)信号输入端连接,所述控制器(8)信号上输出端与所述显示屏(9)信号输入端连接。
技术总结
本实用新型涉及焊接机器人技术领域,公开了一种焊接机器人的升降机构,包括移动台和控制器,所述移动台上侧安装有升降台,所述升降台前侧左右两端均活动安装有螺杆,两组所述螺杆下端均通过传动带传动连接,两组所述螺杆上均拧合连接有升降座,所述升降座下侧安装有机械臂,所述机械臂另一端安装有焊接头,所述焊接头左侧安装有摄像头,所述控制器上设置有操作按键和显示器。本实用新型通过控制器驱动伺服电机转动,可以使升降座下侧的机械臂在升降台上移动,当移动到指定位置后,可以驱动焊接头左侧的摄像头传输的画像,来确定需要焊接的具体位置,从而避免了在焊接视线死角位置时,无法进行焊接。无法进行焊接。无法进行焊接。
技术研发人员:刘昌招
受保护的技术使用者:陕西鲲化智能科技有限公司
技术研发日:2022.01.17
技术公布日:2022/8/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1