一种焊接机器人清枪剪丝装置的制作方法
1.本实用新型涉及焊接机器人技术领域,尤其涉及一种焊接机器人清枪剪丝装置。
背景技术:
2.焊接机器人是专门用于焊接的工作机器人,焊接机器人即在工业机器人末端装接焊枪,进行焊接、切割、热喷涂。在焊接中,由于焊枪需长时间工作,焊枪喷嘴上往往会存留焊接过程中产生的残渣。残渣不清除,会影响焊枪内电弧的稳定性及焊缝质量。需要清枪剪丝装置进行清理。但现有清枪剪丝装置结构复杂、造价高、后期维护困难,且刀具替换不便。
技术实现要素:
3.本实用新型就是针对现有技术存在的缺陷,提供一种焊接机器人清枪剪丝装置。
4.为实现上述目的,本实用新型采用如下技术方案,包括固定架;其特征在于,所述固定架上通过气缸安装底板安装有滑台气缸。
5.所述固定架内设置有导向轴,导向轴上设置有剪丝单元;所述剪丝单元包括安装于导向轴上的两滑块,所述滑块与导向轴滑动连接;两滑块间、导向轴上套有压簧;每个滑块顶部各安装有一刀座,刀座上安装有剪丝刀;剪丝单元的两剪丝刀镜像设置;每个滑块底部各设一滚轮,滚轮与滑块转动连接。
6.两滑块下方、滚轮一侧设置有u型伸缩架,所述气缸的滑台与u型伸缩架相连,剪丝单元的两滚轮位于u型伸缩架的u型槽内。
7.进一步地,所述固定架前端、剪丝刀下方设置有废料槽。
8.进一步地,所述压簧的一端与两滑块中的一滑块相连,压簧的另一端与两滑块中的另一滑块相连。
9.进一步地,所述气缸安装底板通过紧固件固定于固定架顶部。
10.进一步地,所述剪丝单元有两组,两组剪丝单元安装于同一导向轴上,且导向轴上、两组剪丝单元间设置有一用于隔离限位的固定隔套。
11.更进一步地,所述导向轴有两根,两根导向轴平行设置,同一滑块与两导向轴均滑动连接。
12.更进一步地,每个剪丝单元对应一u型伸缩架,设置两剪丝单元时,每个剪丝单元对应一u型伸缩架,两u型伸缩架固连为一w型伸缩架。
13.与现有技术相比本实用新型有益效果。
14.本实用新型焊接机器人清枪剪丝装置固定架上可设置一套或二套剪丝单元,每套剪丝单元均由滑台气缸带动伸缩架,来驱动剪丝单元剪丝。剪丝单元的剪丝刀可方便的由刀架上拆卸下来,剪丝单元与固定架间也可方便拆卸。其结构精巧,且维护方便、造价低廉。
附图说明
15.下面结合附图和具体实施方式对本实用新型做进一步说明。本实用新型保护范围
不仅局限于以下内容的表述。
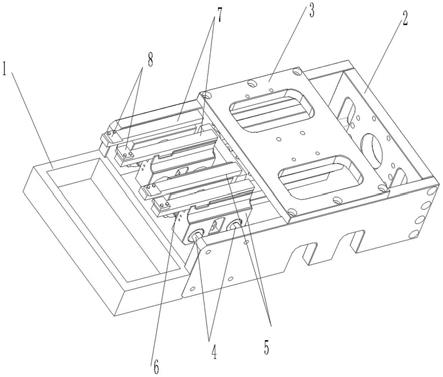
16.图1是具体实施例清枪剪丝装置整体结构示意图。
17.图2是具体实施例清枪剪丝装置的俯视角度示意图。
18.图3是具体实施例清枪剪丝装置的仰视角度示意图。
19.图4是图2的f向局部剖开结构示意图。
20.图5-6是清枪剪丝装置不同角度立体示意图。
21.图中,1为废料槽、2为固定架、3为气缸安装底板、4为导向轴、5为滑块、6为压簧、7为刀座、8为剪丝刀、9为滚轮、10为滑台气缸、11为固定隔套、12为w型伸缩架、13为u型槽、14为剪丝单元一、15为剪丝单元二。
具体实施方式
22.如图1-6所示,具体实施例1:焊接机器人清枪剪丝装置包括固定架2;所述固定架2上通过气缸安装底板3安装有滑台气缸10;具体地,气缸安装底板3安装于固定架2顶部。
23.所述固定架2内设置有导向轴4,导向轴4上设置有剪丝单元;所述剪丝单元包括安装于导向轴4上的两个滑块5,两滑块5间、导向轴4上套有压簧6;所述滑块5与导向轴4滑动连接。
24.每个滑块5顶部各安装有一刀座7,具体地,滑块5与刀座7固连;刀座7上远离气缸安装底板3的一端安装有剪丝刀8。具体地,剪丝刀8通过紧固件安装于刀座7上。剪丝单元的两剪丝刀8镜像设置;每个滑块5底部各设一滚轮9,滚轮9与滑块5转动连接;滚轮9上的轮轴安装于滑块底部,且轮轴与滑块5垂直。
25.两滑块5下方、滚轮9一侧设置有u型伸缩架,所述气缸10的滑台与u型伸缩架相连,带动u型伸缩架左右移动,剪丝单元的两滚轮9位于u型伸缩架的u型槽内。
26.动作过程:气缸10动作,缸杆伸出,与气缸10的滑台相连的u型伸缩架向前推进,u型槽内推动两滚轮9,使得两剪丝刀8产生相对运动,两剪丝刀8间的压簧6压缩,两剪丝刀8实现剪丝。气缸缸杆回收时,u型伸缩架后撤,在压簧6的复位力作用下,两剪丝刀8产生背离运动。
27.优选方案一、所述固定架2前端、剪丝刀8下方设置有废料槽1。具体地,废料槽1与固定架2固定连接。
28.优选方案二、所述压簧6的一端与两滑块5中的一滑块相连,压簧6的另一端与两滑块5中的另一滑块相连。
29.优选方案三、所述气缸安装底板3通过紧固件固定于固定架2顶部。
30.具体实施例:所述剪丝单元有两组,两组剪丝单元安装于同一导向轴4上,且导向轴4上、两组剪丝单元间设置有一用于隔离限位的固定隔套11。每个剪丝单元对应一u型伸缩架,设置两剪丝单元时,每个剪丝单元对应一u型伸缩架;两u型伸缩架固连为一w型伸缩架12。w型伸缩架12具有两个u型槽13,用于推动对应滚轮9。
31.优选方案四、所述导向轴4有两根,两根导向轴4平行设置,且导向轴4两端安装于固定架2内;同一滑块5与两导向轴4均滑动连接。滑块5上设置左右两滑孔,两根导向轴4各穿过一对应滑孔。且滑孔半径大于或等于导向轴半径;使得滑块5可相对两导向轴左右移动。
32.本实用新型焊接机器人清枪剪丝装置固定架2上可设置一套、二套剪丝单元,具体设置几套,由具体需要决定。每套剪丝单元均由滑台气缸10带动伸缩架,气缸动作,滑台伸缩;来驱动剪丝单元剪丝。剪丝单元的剪丝刀8可方便的由刀座7上拆卸下来,只需将剪丝刀8上的紧固件拧松,在剪丝刀磨损时,拧下即可。剪丝单元与固定架2间也可方便拆卸,其结构精巧,且维护方便、造价低廉。
33.可以理解的是,以上关于本实用新型的具体描述,仅用于说明本实用新型而并非受限于本实用新型实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本实用新型进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本实用新型的保护范围之内。
技术特征:
1.一种焊接机器人清枪剪丝装置,包括固定架;其特征在于,所述固定架上通过气缸安装底板安装有滑台气缸;所述固定架内设置有导向轴,导向轴上设置有剪丝单元;所述剪丝单元包括安装于导向轴上的两滑块,所述滑块与导向轴滑动连接;两滑块间、导向轴上套有压簧;每个滑块顶部各安装有一刀座,刀座上安装有剪丝刀;剪丝单元的两剪丝刀镜像设置;每个滑块底部各设一滚轮,滚轮与滑块转动连接;两滑块下方、滚轮一侧设置有u型伸缩架,所述气缸的滑台与u型伸缩架相连,剪丝单元的两滚轮位于u型伸缩架的u型槽内。2.根据权利要求1所述的一种焊接机器人清枪剪丝装置,其特征在于:所述固定架前端、剪丝刀下方设置有废料槽。3.根据权利要求1所述的一种焊接机器人清枪剪丝装置,其特征在于:所述压簧的一端与两滑块中的一滑块相连,压簧的另一端与两滑块中的另一滑块相连。4.根据权利要求1所述的一种焊接机器人清枪剪丝装置,其特征在于:所述气缸安装底板通过紧固件固定于固定架顶部。5.根据权利要求1所述的一种焊接机器人清枪剪丝装置,其特征在于:所述剪丝单元有两组,两组剪丝单元安装于同一导向轴上,且导向轴上、两组剪丝单元间设置有一用于隔离限位的固定隔套。6.根据权利要求5所述的一种焊接机器人清枪剪丝装置,其特征在于:所述导向轴有两根,两根导向轴平行设置,同一滑块与两导向轴均滑动连接。7.根据权利要求5所述的一种焊接机器人清枪剪丝装置,其特征在于:每个剪丝单元对应一u型伸缩架,设置两剪丝单元时,每个剪丝单元对应一u型伸缩架,两u型伸缩架固连为一w型伸缩架。
技术总结
本实用新型涉及焊接机器人技术领域,尤其涉及一种焊接机器人清枪剪丝装置。其结构精巧,且维护方便、造价低廉。包括固定架;所述固定架上通过气缸安装底板安装有滑台气缸;所述固定架内设置有导向轴,导向轴上设置有剪丝单元;所述剪丝单元包括安装于导向轴上的两滑块,所述滑块与导向轴滑动连接;两滑块间、导向轴上套有压簧;每个滑块顶部各安装有一刀座,刀座上安装有剪丝刀;剪丝单元的两剪丝刀镜像设置;每个滑块底部各设一滚轮,滚轮与滑块转动连接;两滑块下方、滚轮一侧设置有U型伸缩架,所述气缸的滑台与U型伸缩架相连,剪丝单元的两滚轮位于U型伸缩架的U型槽内。的两滚轮位于U型伸缩架的U型槽内。的两滚轮位于U型伸缩架的U型槽内。
技术研发人员:杨振
受保护的技术使用者:常州卓毅焊接设备有限公司
技术研发日:2022.01.25
技术公布日:2022/6/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1