一种动触头自动焊机的制作方法
1.本实用新型涉及动触头生产加工的技术领域,特别涉及一种动触头自动焊机。
背景技术:
2.动触头在生产加工的过程中,需要将其焊接到杆件上,现有的焊接方式主要是工人将动触头与杆件分别进行定位,然后进行对接,对接后再进行人工焊接,这种焊接方式主要通过人力进行焊接,不仅焊接效率低、而且耗费劳动力较大,导致企业的整体生产效率较低。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种动触头自动焊机,以解决背景技术中描述的现有技术中动触头焊接效率低、耗费劳动力大的问题。
4.为解决上述问题,本实用新型提供以下的技术方案:一种动触头自动焊机,包括
5.支撑板,设置于焊接台上;
6.升降板,可升降的设置于支撑板上;
7.转动板,可转动的设置于升降板上;
8.定位板,设置于转动板的圆心处;
9.转盘,可转动的设置于定位板上;
10.焊枪,设置于转盘的外壁上;
11.底板,设置于焊接台上,该底板上设置有定位槽,该底板的内部设置有吸气腔,该定位槽的底部设置有若干与吸气腔连通的吸气孔;
12.移动板,可转动的设置于底板上,该移动板的末端还设置有磁铁。
13.优选的:该底板的上表面设置有定位柱,该移动板转动套设于定位柱上。
14.优选的:该支撑板上设置有升降气缸,该升降气缸的输出端与升降板连接,该升降板上设置有若干滑动贯穿支撑板的导向杆。
15.优选的:该转动板上套设有齿环,该升降板上设置有驱动电机,该驱动电机的输出端设置有与齿环啮合的第一齿轮。
16.优选的:该定位板上设置有转动座,该转盘与转动座转动连接,该转盘的外壁设置有齿条,该转动座上设置有伺服电机,该伺服电机的输出端设置有与齿条啮合的齿环。
17.采用以上技术方案的有益效果是:
18.本申请通过设置的升降板能够带动转动板竖向移动,通过转动板带动焊枪围绕转动板的中轴线转动,并且转盘能够微调焊枪的角度;通过设置的磁铁能够吸附动触头,并通过移动板带动动触头与定位槽内的杆件接触,然后通过焊枪对动触头与杆件的连接处进行焊接。
附图说明
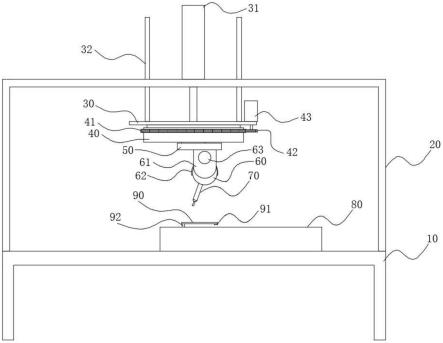
19.图1是本实用新型一种动触头自动焊机的主视图。
20.图2是本实用新型底板的俯视图。
21.图3是本实用新型底板的剖视图。
22.图4是本实用新型转动座的剖视图。
23.其中:焊接台10、支撑板20、升降板30、升降气缸31、导向杆32、转动板40、齿环41、齿轮42、驱动电机43、定位板50、转盘60、转动座61、齿条62、伺服电机63、第二齿轮64、焊枪70、底板80、定位槽81、吸气孔82、吸气腔83、移动板90、磁铁91、定位柱92。
具体实施方式
24.下面结合附图详细说明本实用新型的实施方式。
25.如图1-4,在本实施例一中,一种动触头自动焊机,包括
26.支撑板20,设置于焊接台10上;
27.升降板30,可升降的设置于支撑板20上;
28.转动板40,可转动的设置于升降板30上;
29.定位板50,设置于转动板40的圆心处;
30.转盘60,可转动的设置于定位板50上;
31.焊枪70,设置于转盘60的外壁上;
32.底板80,设置于焊接台10上,该底板80上设置有定位槽81,该底板80的内部设置有吸气腔83,该定位槽81的底部设置有若干与吸气腔83连通的吸气孔82;
33.移动板90,可转动的设置于底板80上,该移动板90的末端还设置有磁铁91。
34.本实施例是这样实施的:
35.本申请在使用时,先将杆件至于定位槽81内,通过外接吸气设备,将吸气腔83内的空气抽离,使得杆件被吸附于定位槽81内,然后用磁铁91吸附动触头,然后转动移动板90,将动触头与杆件的焊接位对接;
36.然后转盘60转动,使得焊枪倾斜一定的角度,然后升降板30带动焊枪70向下移动,使得焊枪70与动触头、杆件的相交处相接触,然后转动板40转动,带动焊枪70围绕动触头转动并实现焊接。
37.实施例二
38.作为实施例一的优化方案,该底板80的上表面设置有定位柱92,该移动板90转动套设于定位柱92上。
39.本实施例是这样实施的,该移动板90套在定位柱92上,使得移动板90能够在定位柱92上转动。
40.实施例三
41.作为实施例一的优化方案,该支撑板20上设置有升降气缸31,该升降气缸31的输出端与升降板30连接,该升降板30上设置有若干滑动贯穿支撑板20的导向杆32。
42.本实施例是这样实施的,通过设置的升降气缸31能够带动升降板30竖向移动,并且通过导向杆32能够提高升降板30竖向移动的稳定性。
43.实施例四
44.作为实施例一的优化方案,该转动板40上套设有齿环41,该升降板30上设置有驱动电机43,该驱动电机43的输出端设置有与齿环41啮合的第一齿轮42。
45.本实施例是这样实施的,通过设置的驱动电机43能够带动第一齿轮42转动,第一齿轮42带动齿环41转动,齿环41带动转动板40在升降板30上转动。
46.实施例五
47.作为实施例一的优化方案,该定位板50上设置有转动座61,该转盘60与转动座61转动连接,该转盘60的外壁设置有齿条62,该转动座61上设置有伺服电机63,该伺服电机63的输出端设置有与齿条62啮合的齿环64。
48.本实施例是这样实施的,通过设置的伺服电机63能够带动第二齿轮64转动,第二齿轮64带动齿条62转动,齿条62带动转盘60转动。
49.以上该的仅是本实用新型的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
技术特征:
1.一种动触头自动焊机,其特征在于:包括支撑板,设置于焊接台上;升降板,可升降的设置于支撑板上;转动板,可转动的设置于升降板上;定位板,设置于转动板的圆心处;转盘,可转动的设置于定位板上;焊枪,设置于转盘的外壁上;底板,设置于焊接台上,该底板上设置有定位槽,该底板的内部设置有吸气腔,该定位槽的底部设置有若干与吸气腔连通的吸气孔;移动板,可转动的设置于底板上,该移动板的末端还设置有磁铁。2.根据权利要求1所述的一种动触头自动焊机,其特征在于,该底板的上表面设置有定位柱,该移动板转动套设于定位柱上。3.根据权利要求1所述的一种动触头自动焊机,其特征在于,该支撑板上设置有升降气缸,该升降气缸的输出端与升降板连接,该升降板上设置有若干滑动贯穿支撑板的导向杆。4.根据权利要求1所述的一种动触头自动焊机,其特征在于,该转动板上套设有齿环,该升降板上设置有驱动电机,该驱动电机的输出端设置有与齿环啮合的第一齿轮。5.根据权利要求1所述的一种动触头自动焊机,其特征在于,该定位板上设置有转动座,该转盘与转动座转动连接,该转盘的外壁设置有齿条,该转动座上设置有伺服电机,该伺服电机的输出端设置有与齿条啮合的齿环。
技术总结
本实用新型公开了一种动触头自动焊机,涉及动触头生产加工的技术领域,包括支撑板,设置于焊接台上;升降板,可升降的设置于支撑板上;转动板,可转动的设置于升降板上;定位板,设置于转动板的圆心处;转盘,可转动的设置于定位板上;焊枪,设置于转盘的外壁上;底板,设置于焊接台上,该底板上设置有定位槽,该底板的内部设置有吸气腔,该定位槽的底部设置有若干与吸气腔连通的吸气孔;移动板,可转动的设置于底板上,该移动板的末端还设置有磁铁;本申请具有使用方便、焊接效率高、精度高等优点。精度高等优点。精度高等优点。
技术研发人员:田佳辉 钱成华 徐冬山 叶晨来 曾清德 陈斌 刘龙会 潘胜斌
受保护的技术使用者:浙江宝丰机电有限公司
技术研发日:2022.01.31
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1