一种夹爪及配套装置的制作方法
1.本实用新型涉及到汽车零部件的技术领域,尤其涉及到一种夹爪及配套装置。
背景技术:
2.汽车配件是构成汽车整体的各个单元及服务于汽车的一种产品。汽车配件的种类繁多,随着人们生活水平的提高,人们对汽车的消费也越来越多,汽车配件的这个市场变得也越来越大。近些年来汽车配件制造厂也在飞速地发展。
3.现有技术中的汽车配件加工焊接夹爪装置,包括以下问题:
4.1、对汽车配件不能进行灵活夹持;
5.2、汽车配件夹持的稳定性较差;
6.3、对夹爪结构位置调节的灵活性相对较差。
技术实现要素:
7.本实用新型的目的在于提供一种夹爪及配套装置,用于解决上述技术问题。
8.本实用新型采用的技术方案如下:
9.一种夹爪及配套装置,夹爪结构,所述夹爪机构包括第一压片和第二压片;所述第一压片和第二压片可活动地连接;所述第二压片通过驱动装置与所述第一压片活动连接,以能够接受压力而向所述第一压片发生位移;
10.连接轴,所述第一压片的一端和所述第二压片的一端通过连接轴;
11.所述驱动装置安装在连接轴上,第一驱动部用于驱动所述第一压片的和所述第二压片做水平方向的移动;
12.机械臂,所述机械臂与所述驱动装置连接,机械臂包括固定杆,所述固定杆的内部安装有第一自动伸缩件,所述第一自动伸缩件的顶部安装有升降柱,所述升降柱的内部安装有第一正反转电机,所述第一正反转电机的输出端安装有转动架,所述转动架的一侧通过螺栓安装有第二正反转电机,所述第二正反转电机的输出端转动连接有连接板,所述连接板的一侧安装有转动柱,所述转动柱的内部安装有第二自动伸缩件,所述第二自动伸缩件的输出端安装有移动柱;
13.定位装置,所述定位装置安装在所述机械臂上,所述定位装置用于使产品在治具上精确定位。
14.作为进一步的优选,所述定位装置包括基座、第一定位单元和第二定位单元,且所述第一定位单元和所述第二定位单元均设置于所述基座上。
15.作为进一步的优选,所述移动柱的内部安装有第第三正反转电机,所述第三正反转电机的输出端安装有夹持座,所述夹持座的一侧通过螺栓安装有电动伸缩杆三,所述电动伸缩杆三的输出端安装有夹持板,所述夹持板的一侧和夹持座的内壁安装有橡胶垫。
16.作为进一步的优选,所述距离传感器安装在所述机械臂上。
17.作为进一步的优选,所述第一驱动部为双向气缸或双向液压缸。
18.一种配套装置,包括上述中任意一项所述的夹爪装置,其特征在于,包括主机,所述夹爪安装在所述主机上。
19.上述技术方案具有如下优点或有益效果:
20.(1)本实用新型中,设置的正反转电机、正反转电机用于驱动自动伸缩件,动伸缩件的设置便于移动夹爪结构,正反转电机三能够带动夹爪结构转动,提高夹爪结构移动时的灵活。
附图说明
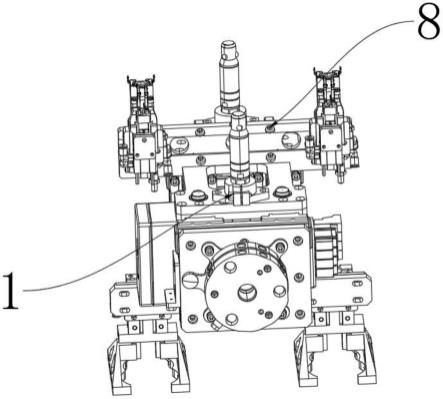
21.图1是本实用新型夹爪及配套装置的结构示意图;
22.图2是本实用新型夹爪结构的结构示意图。
23.图中:1、夹爪结构;2、第一压片;3、第二压片;4、驱动装置;5、主机;6、机械臂;7、定位装置。
具体实施方式
24.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
25.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
27.实施例一:结合图1-2所示,本实用新型中,夹爪结构1,夹爪机构包括第一压片2和第二压片3;第一压片2和第二压片3可活动地连接;第二压片3通过驱动装置4与第一压片2活动连接,以能够接受压力而向第一压片2发生位移;
28.连接轴,第一压片2的一端和第二压片3的一端通过连接轴;
29.驱动装置4安装在连接轴上,第一驱动部用于驱动第一压片2的和第二压片3做水平方向的移动;
30.机械臂6,机械臂6与驱动装置4连接,机械臂6包括固定杆,固定杆的内部安装有第一自动伸缩件,第一自动伸缩件的顶部安装有升降柱,升降柱的内部安装有第一正反转电机,第一正反转电机的输出端安装有转动架,转动架的一侧通过螺栓安装有第二正反转电机,第二正反转电机的输出端转动连接有连接板,连接板的一侧安装有转动柱,转动柱的内部安装有第二自动伸缩件,第二自动伸缩件的输出端安装有移动柱;
31.定位装置7,定位装置7安装在机械臂6上,定位装置7用于使产品在治具上精确定位。
32.进一步,作为一种较佳的实施方式,定位装置7包括基座、第一定位单元和第二定位单元,且第一定位单元和第二定位单元均设置于基座上。
33.进一步,作为一种较佳的实施方式,移动柱的内部安装有第三正反转电机,第三正
反转电机的输出端安装有夹持座,夹持座的一侧通过螺栓安装有电动伸缩杆三,电动伸缩杆三的输出端安装有夹持板,夹持板的一侧和夹持座的内壁安装有橡胶垫。
34.进一步,作为一种较佳的实施方式,距离传感器安装在机械臂6上。
35.进一步,作为一种较佳的实施方式,一种配套装置,包括上述的夹爪装置,包括主机5,夹爪安装在主机5上。
36.以上仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
技术特征:
1.一种夹爪,其特征在于,夹爪结构(1),所述夹爪结构包括第一压片(2)和第二压片(3);所述第一压片(2)和第二压片(3)可活动地连接;所述第二压片(3)通过驱动装置(4)与所述第一压片(2)活动连接,以能够接受压力而向所述第一压片(2)发生位移;连接轴,所述第一压片(2)的一端和所述第二压片(3)的一端通过连接轴;所述驱动装置(4)安装在连接轴上,第一驱动部用于驱动所述第一压片(2)的和所述第二压片(3)做水平方向的移动;机械臂(6),所述机械臂(6)与所述驱动装置(4)连接,机械臂(6)包括固定杆,所述固定杆的内部安装有第一自动伸缩件,所述第一自动伸缩件的顶部安装有升降柱,所述升降柱的内部安装有第一正反转电机,所述第一正反转电机的输出端安装有转动架,所述转动架的一侧通过螺栓安装有第二正反转电机,所述第二正反转电机的输出端转动连接有连接板,所述连接板的一侧安装有转动柱,所述转动柱的内部安装有第二自动伸缩件,所述第二自动伸缩件的输出端安装有移动柱;定位装置(7),所述定位装置(7)安装在所述机械臂(6)上,所述定位装置(7)用于使产品在治具上精确定位。2.根据权利要求1所述夹爪,其特征在于,所述定位装置(7)包括基座、第一定位单元和第二定位单元,且所述第一定位单元和所述第二定位单元均设置于所述基座上。3.根据权利要求1所述夹爪,其特征在于,所述移动柱的内部安装有第第三正反转电机,所述第三正反转电机的输出端安装有夹持座,所述夹持座的一侧通过螺栓安装有电动伸缩杆三,所述电动伸缩杆三的输出端安装有夹持板,所述夹持板的一侧和夹持座的内壁安装有橡胶垫。4.根据权利要求1所述夹爪,其特征在于,还包括距离传感器,所述距离传感器安装在所述机械臂(6)上。5.根据权利要求1所述夹爪,其特征在于,所述第一驱动部为双向气缸或双向液压缸。6.一种配套装置,包括上述权利要求1-5中任意一项所述的夹爪,其特征在于,包括主机(5),所述夹爪安装在所述主机(5)上。
技术总结
本实用新型公开了一种夹爪及配套装置,涉及到汽车零部件的技术领域,夹爪结构,夹爪机构包括第一压片和第二压片;第一压片和第二压片可活动地连接;第二压片通过驱动装置与第一压片活动连接,以能够接受压力而向第一压片发生位移;机械臂,机械臂与驱动装置连接,机械臂包括固定杆,固定杆的内部安装有第一自动伸缩件,第一自动伸缩件的顶部安装有升降柱,升降柱的内部安装有第一正反转电机,第一正反转电机的输出端安装有转动架,转动架的一侧通过螺栓安装有第二正反转电机。在使用时,自动伸缩件的设置便于移动夹爪结构,正反转电机三能够带动夹爪结构转动,提高夹爪结构移动时的灵活。活。活。
技术研发人员:林双 戴波
受保护的技术使用者:慈溪市三佩机械有限公司
技术研发日:2022.02.25
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1