一种螺钉弹垫取放拧动机械手的制作方法
1.本实用新型涉及用于自动化进行螺钉与弹垫组合式的取放拧动的机械手领域。
背景技术:
2.大型法兰类工件进行装配时,上法兰和下法兰对位就绪后,需要进行装弹垫和拧螺钉,现有的大型法兰结构和上下法兰锁固结构方式有多种,例如图1和图2所示的两种法兰结构锁固方式。图1所示的为外部锁固的方式,开放式,外部可操作空间大,手动操作螺钉和弹垫比较不会有什么不便问题,也可有多种自动化操作方式可实现,自动化机械相对简单容易,而对于图2所示的这种在上法兰内部的并且是在深孔内底部的,这种也是常见使用的一种法兰结构,这种操作放入弹垫和螺钉的就存在着装配空间有限的问题,空间有限,不容易对孔放置。目前采用较多的螺钉和弹垫是分体的,分别多个包装的,在使用装配锁固之前螺钉与弹垫的准备目前是没有特别机械操作工序进行两者的组合,而是人工来手动分别一一取件对应组合装配,以供装配锁固大型法兰时使用。使用时由于螺钉和弹垫是分体的,在放置入锁固孔前螺钉弹垫会有容易出现弹垫螺钉分体掉落的问题。还有,现有的大型法兰锁固操作方式是通过人工进行上螺钉弹垫再锁固的方式,存在工作效率低,人工工作劳动强度大,螺钉弹垫装配后扭矩一致性不足等问题。
3.有鉴于此,本案发明人致力于自动化操作的研究设计,经过生产试验,遂有本案产生。
技术实现要素:
4.本实用新型的目的在于提供一种机械自动化进行对组合完成的螺钉弹垫的防掉落分离的抓取和拧动螺钉,以代替人工操作,实现提升装配锁固一致性和工作效率的一种螺钉弹垫取放拧动机械手。
5.为实现上述目的,本实用新型的技术方案是:一种螺钉弹垫取放拧动机械手,包括可实现多维方向移动的多维移动装置以及安装设置在多维移动装置上用于抓取组合装配了弹垫的螺钉和拧动螺钉的取放装置,所述取放装置包括安装座、通过滑动导向结构可滑动连接在安装座上的滑动座、安装设置在安装座上并且活塞杆连接滑动座的推动气缸、安装设置在滑动座上的螺钉枪、通过支座架设在安装座端部上的螺钉吸头和弹垫防落结构,所述螺钉枪的工作端上通过批头连接套连接有批头,所述螺钉吸头上设有贯穿的通孔,所述通孔的一端为吸螺钉端,该吸螺钉端内固定嵌设有吸环,所述批头从通孔另一端穿入在内活动,其活动时可穿过吸环推出被吸环吸附住的螺钉并且可带动螺钉,所述弹垫防落结构对应螺钉吸头的吸螺钉端连接设置在支座外侧或安装座端部上。
6.所述弹垫防落结构包括固定设置在支座或安装座上的导向座、固定设置在支座或安装座上的电磁部件、可伸缩穿设在电磁部件上的移动杆以及可伸缩活动穿设在导向座上并且一端与移动杆一端连接的防落杆,所述移动杆与电磁部件之间设有复位弹簧,所述防落杆与导向座之间设有防止防落杆转动的定向结构,所述防落杆的另一端为限位端,活动
时可对应在吸螺钉端的端口外用于挡住弹垫边沿。
7.所述定向结构为所述防落杆上设有定向块,所述定向块与导向座之间设有导向杆和导向孔配合的滑动结构。
8.所述取放装置为左右对称的设置两组,两组取放装置为安装螺钉枪的一侧相背方向设置,并且两组取放装置的安装座通过连接板固定连接在一起,两组取放装置的弹垫防落结构在两螺钉吸头的相对侧设置;所述取放装置与连接板之间以可调整取放装置位置的方式连接;
9.或者,所述取放装置为三组以上的环形阵列布置的多组设置,多组取放装置为安装螺钉枪的一侧朝向环形阵列的外侧设置,并且多组取放装置的安装座通过连接板固定连接在一起,多组取放装置的弹垫防落结构在朝向环形阵列的内侧设置;所述取放装置与连接板之间以可调整取放装置位置的方式连接。
10.所述多维移动装置通过连接部件与连接板连接。
11.所述多维移动装置为多轴机械臂,所述连接部件为可实现快速拆装连接的快换盘。
12.所述连接板上还设有拆卸定位放置结构。
13.通过采用上述技术方案,本实用新型的有益效果是:上述装置结构使用时通过取放装置上的吸头将组合装配好弹垫的螺钉抓取住,通过弹垫防落结构将弹垫限位阻挡住,可在抓取移动过程中螺钉能够稳定被抓取,而弹垫可确保套在螺钉上不会分离开,该取放装置结构的设置可进行一些需采用嵌入式的工件的螺钉弹垫上料锁固,且可同步多组进行,大大提高工作效率,因此特别适合于一些内部深孔的锁固操作,如上述背景技术中描述的需进行内部深孔结构锁固操作的大型法兰。上述机械结构设置机械动作的整个过程中无需人工参与操作,因此可完全替代人工,解决人工操作可能带来的问题,如人工劳动强度大、工作效率低难于提升、锁固扭转一致性不足等问题,上述机械结构设置还具有布局合理、结构稳固、动作精度高、动作稳定顺畅,不易产生故障,不会存在工序及机械动作冲突。
附图说明
14.图1和图2是背景技术中涉及的法兰结构锁固方式的两种结构示意图;
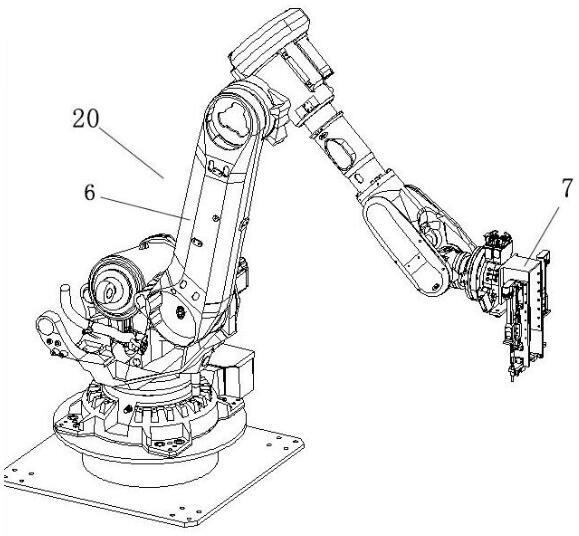
15.图3是本实用新型涉及的一种螺钉弹垫取放拧动机械手的结构示意图;
16.图4是本实用新型涉及的取放装置的结构示意图;
17.图5是本实用新型涉及的螺钉吸头截面结构示意图;
18.图6是本实用新型涉及的弹垫防落结构的结构示意图;
19.图7是本实用新型涉及的取放装置抓取使用的结构示意图;
20.图8是本实用新型涉及的取放装置放置拧动的结构示意图。
21.图中:
22.取放机械手20;多维移动装置6;
23.取放装置7;连接板71;拆卸定位放置结构72;
24.安装座73;滑动座74;推动气缸75;螺钉枪76;批头连接套761;批头762;
25.支座77;螺钉吸头78;通孔781;吸环782;
26.弹垫防落结构79;导向座791;电磁部件792;移动杆793;
27.防落杆794;限位端7941;复位弹簧795;
28.定向结构796;定向块7961;导孔导向杆7962。
具体实施方式
29.为了进一步解释本实用新型的技术方案,下面通过具体实施例来对本实用新型进行详细阐述。
30.本实施例公开的一种螺钉弹垫取放拧动机械手,该机械手20如图3-图8所示,包括可实现多维方向移动的多维移动装置6以及安装设置在多维移动装置6上用于抓取组合装配了弹垫的螺钉和拧动螺钉的取放装置7,通过多维移动装置6动作来带动取放装置7移动位置,构成完整的机械手20从而实现可代替人工操作的机械自动化进行,本实施例附图中所示的多维移动装置6为多轴机械臂,是一种技术成熟的智能机械臂,灵活性高,可编译实现活动范围动作更广,因此这里优选采用这种机械臂,当然根据实际操作动作,该多维移动装置6也可以是现有技术中的其他多维移动机械装置,这里就不再详细例举,而附图中的多轴机械臂是通过一种通常使用的快换盘与取放装置7(下述描述中的连接板71)连接从而实现自动化的可快速拆装,这里说到取放装置7可快换拆装,顺便先说一下,本实施例中所述取放装置7(下述描述中连接板71)上还设有拆卸定位放置结构72,如附图中所示,连接板71上设有凸出的横杆,横杆上靠两端的下表面安装设有定位销,通过定位销的穿插在供放置取放装置7的放置架上,从而实现取放机械手的可快速拆装,定位稳定放置,无需人工参与操作。而所述取放装置7的用途是用于抓取装配移载台2上组合装配好弹垫的螺钉稳定移动至对应的锁固孔工位上进行上料操作,例如进行内部深孔锁固结构的大型法兰的操作,通过多轴机械臂带动取放装置7移动至对应抓取工位的上方,动作限定住弹垫抓取起螺钉移动到对应大型法兰的深孔上方,然后下降嵌入深孔内并对应法兰的锁固孔将螺钉穿入锁固孔内进行锁固操作。更进一步的详细结构,下面结合附图详细描述。
31.所述取放装置7如图3和图4所示,包括安装座73、通过滑动导向结构可滑动连接在安装座73上的滑动座74、安装设置在安装座73上并且活塞杆通过浮动接头连接滑动座74的推动气缸75、安装设置在滑动座74上的螺钉枪76、通过支座77架设在安装座73端部上的螺钉吸头78和弹垫防落结构79,所述螺钉枪76的工作端上通过批头连接套761连接有批头762,所述螺钉吸头78上设有贯穿的通孔781,所述通孔781的一端为吸螺钉端(图中朝下的一端),该吸螺钉端内固定嵌设有吸环782,如图5所示,所述批头762从通孔781另一端穿入在内活动(通过推动气缸75推动螺钉枪76上下活动从而实现批头762在通孔781内上下伸缩活动),其活动时可穿过吸环782推出被吸环782吸附住的螺钉,该动作主要是在对应锁固孔件螺钉穿入时的动作,螺钉穿入后还可通过螺钉枪的旋转工作来带动螺钉旋转实现缩进,反之也可实现松拧螺钉,因此该取放装置7也可用于拆卸时的工作应用,上述的功能作用描述不能认为是装置工作使用方式唯一的限定,上述结构设置结构部件之间连接稳固、上下活动稳定顺畅。
32.所述弹垫防落结构79,如图4、图6、图7和图8所示,对应螺钉吸头78的吸螺钉端连接设置在支座77外侧或安装座73下端部上,其用途是非常重要的用于限位住弹垫防止其从螺钉上分离掉落下,该弹垫防落结构79既要能够限位弹垫防掉落实现针对背景技术要解决的重要问题之一,又须不影响螺钉上料锁固的正常操作。所述弹垫防落结构79本实施例中
公开的结构如图6所示,包括固定设置在支座77或安装座73上的导向座791、固定设置在支座77或安装座73上的电磁部件792、可伸缩穿设在电磁部件792上的移动杆793以及可伸缩活动穿设在导向座791上并且一端与移动杆793一端连接的防落杆794,所述移动杆793与电磁部件792之间设有复位弹簧795,起到电磁部件792断电后移动杆793(带动防落杆794)的复位作用,所述防落杆794与导向座791之间设有防止防落杆794转动的定向结构796,如图中所示的定向结构为所述防落杆794上设有定向块7961,所述定向块7961与导向座791之间设有导孔导向杆7962和导向孔配合的滑动结构,所述防落杆794的另一端为限位端7941,如图所示限位端7941具有利于限位弹垫端面的平面,因此上述定向结构796的设置是为了防止防落杆794在伸缩活动中出现旋转选装导致有利于限位弹垫端面的平面不能够较好的达到作用,活动时限位端7941的平面可对应在吸螺钉端的端口外用于挡住弹垫边沿,通过上述结构设置弹垫防落结构79能够达到结构稳固、限位动作稳定顺畅的效果,无需进行弹垫的防掉落分离时(通常是取放装置抓取前和抓取移动放置后),电磁部件792得电,吸附移动杆793缩回动作,防落杆794的限位端7941避开弹垫,而需进行弹垫的防掉落分离时(通常是取放装置7的抓取和移动过程中),电磁部件792断电,移动杆793失去吸附力,在复位弹簧795的张力作用下伸出使得防落杆794的限位端7941对应至弹垫的外端面边沿从而能够稳定阻挡住弹垫,防止掉落分离。
33.本实施例中,根据实际使用中的常见使用需要,例如在大型法兰的装配锁固上使用,通常法兰上的锁固孔是均布规则的布设的,如三个呈120度间隔分布,或者4个90度间隔分布,为了提升本实用新型的设备使用时的工作效果,可进一步的将所述取放装置7为左右对称的设置两组,可同时进行两组的装配锁固操作,或者,为三组以上的环形阵列布置的多组设置,可同时三组的装配锁固操作,可大大提升工作效率,提高企业生产效益,图中示出的为前者结构。在两组的结构设置中,两组取放装置7为安装螺钉枪76的一侧相背方向设置,并且两组取放装置7的安装座73通过连接板71固定连接在一起,两组取放装置7的弹垫防落结构79在两螺钉吸头78的相对侧设置,合理应用空间弹垫防落结构79可正常动作实现功能作用,也能防止弹垫防落结构79影响嵌入深孔操作,如图4、图7和图8所示。在三组以上的结构设置中多组取放装置7为安装螺钉枪76的一侧朝向环形阵列的外侧设置,并且多组取放装置7的安装座73通过连接板71固定连接在一起,多组取放装置7的弹垫防落结构79在朝向环形阵列的内侧设置,结构设置同样具有上述的作用效果,工作状态下的结构如图7和图8所示。
34.上述结构中推动机构、移动机构或滑动导向机构为可采用现有常用结构技术,上述文中没有详细描述结构位置连接关系,从附图中可清楚看出,因此不影响对本案技术方案的清楚理解。
35.上述实施例和图式并非限定本实用新型的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本实用新型的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1