一种用于CNC的无动力快换磁铁吸爪的制作方法
一种用于cnc的无动力快换磁铁吸爪
技术领域
1.本申请涉及非标自动化技术领域,特别涉及一种用于cnc的无动力快换磁铁吸爪。
背景技术:
2.传统cnc上料通常采用机械手上料,cnc钣金门要么一直打开,要么因为上下料的需要频繁打开,这样cnc内的切削液会大量泄露到车间空气重,造成污染,同时此种方案成本与技术难度较高。
技术实现要素:
3.本申请提出一种用于cnc的无动力快换磁铁吸爪,旨在保证cnc实现自动换料的同时降低成本与技术难度。
4.本申请实施例提供一种用于cnc的无动力快换磁铁吸爪,包括:用于与 cnc的主轴连接的刀柄、用于吸附cnc加工治具的吸爪、用于连接所述刀柄与吸爪的转轴;
5.所述转轴一端与所述刀柄连接,所述刀柄开设有供所述转轴端部活动插入的安装孔,且所述转轴端部与所述安装孔底部之间抵接有第一弹簧;
6.所述转轴另一端与所述吸爪连接,所述吸爪上设有用于安装所述转轴端部的轴承;所述转轴外部套设一套筒,所述刀柄设有供所述套筒一端沿轴向滑动的限位滑槽;所述套筒另一端与所述吸爪固定连接;
7.所述吸爪包括一主壳体,所述主壳体内安装一导轨滑块机构,所述导轨滑块机构上滑动连接一安装板,所述安装板上活动安装有若干平行排布的导向轴,任一所述导向轴上活动穿设一磁铁,且所述磁铁与所述安装板之间抵接有第二弹簧。
8.一些实施例中,所述刀柄外侧对称安装两拉套,所述限位滑槽位于所述拉套内侧,且所述拉套边缘设有用于防止套筒从所述限位滑槽滑出的挡边。
9.一些实施例中,所述转轴上设有一轴肩,所述套筒内设有与所述轴肩适配的卡槽,所述转轴上套设有第三弹簧,所述第三弹簧一端与所述轴肩抵接,所述第三弹簧另一端与所述吸爪的主壳体表面抵接。
10.一些实施例中,所述转轴与所述安装孔连接的端部侧面延其轴向开设有至少一个第一半圆槽,所述安装孔内侧设有与所述第一半圆槽对应的第二半圆槽,所述第一半圆槽和第二半圆槽构成的空间内安装有限位销钉。
11.一些实施例中,所述导轨滑块机构上安装有用于对安装板的运动进行限位的限位块。
12.一些实施例中,所述主壳体内安装一定位块,所述定位块上沿安装板的运动方向安装一调整螺丝,所述调整螺丝端部与所述定位块连接。
13.一些实施例中,所述导向轴设置为四个,且四个所述导向轴呈矩阵装排布。
14.一些实施例中,所述主壳体侧面安装有用于观察内部安装板位置的透明亚克力板。
15.与现有技术相比,本申请的有益效果是:在降低cnc自动上下料成本与技术难度的同时,有效减小了cnc切削液对车间空气环境的污染。
附图说明
16.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
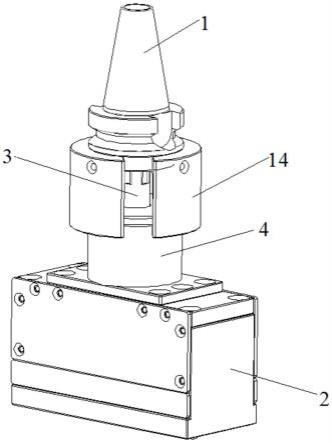
17.图1为本申请磁铁吸爪整体结构示意图;
18.图2为本申请磁铁吸爪整体结构爆炸图;
19.图3为本申请吸爪内部结构示意图;
20.图4为本申请转轴结构示意图;
21.本申请目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
22.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请的一部分实施例,而不是全部的实施例。
23.除非另有定义,本申请所使用的的所有技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请。
24.本实施例提出的一种用于cnc的无动力快换磁铁26吸爪2,参考图1 和图2,包括:用于与cnc的主轴连接的刀柄1、用于吸附cnc加工治具的吸爪2、用于连接所述刀柄1与吸爪2的转轴3;
25.所述转轴3一端与所述刀柄1连接,所述刀柄1开设有供所述转轴3端部活动插入的安装孔11,且所述转轴3端部与所述安装孔11底部之间抵接有第一弹簧12;
26.所述转轴3另一端与所述吸爪2连接,所述吸爪2上设有用于安装所述转轴3端部的轴承21;所述转轴3外部套设一套筒4,所述刀柄1设有供所述套筒4一端沿轴向滑动的限位滑槽13;所述套筒4另一端与所述吸爪2固定连接;
27.所述吸爪2包括一主壳体22,所述主壳体22内安装一导轨滑块机构23,所述导轨滑块机构23上滑动连接一安装板24,所述安装板24上活动安装有若干平行排布的导向轴25,任一所述导向轴25上活动穿设一磁铁26,且所述磁铁26与所述安装板24之间抵接有第二弹簧27。
28.进一步地,所述刀柄1外侧对称安装两拉套14,所述限位滑槽13位于所述拉套14内侧,且所述拉套14边缘设有用于防止套筒4从所述限位滑槽13 滑出的挡边15。通过挡边15的限位,将套筒4限制在限位滑槽13内,在取放料时,可以带动吸爪2进行升降,实现缓冲的目的。
29.进一步地,参考图4,所述转轴3上设有一轴肩31,所述套筒4内设有与所述轴肩31适配的卡槽,所述转轴3上套设有第三弹簧32,所述第三弹簧 32一端与所述轴肩31抵接,所述第三弹簧32另一端与所述吸爪2的主壳体 22表面抵接。第三弹簧32始终处于压缩状态,
在第三弹簧32的作用下,旋转轴3的轴肩31被顶紧在套筒4内侧的卡槽内。
30.进一步地,所述转轴3与所述安装孔11连接的端部侧面延其轴向开设有至少一个第一半圆槽33,所述安装孔11内侧设有与所述第一半圆槽33对应的第二半圆槽,所述第一半圆槽33和第二半圆槽构成的空间内安装有限位销钉。通过限位销定,可以有效防止转轴3和刀柄1之间发生相对转动,使刀柄1和转轴3同步旋转。
31.进一步地,所述导轨滑块机构23上安装有用于对安装板24的运动进行限位的限位块28,通过限位块28对安装板24的运动进行有效限位,本实施例中,安装滑板可以前后移动10mm。
32.进一步地,参考图3,所述主壳体22内安装一定位块29,所述定位块29 上沿安装板24的运动方向安装一调整螺丝210,所述调整螺丝210端部与所述定位块连接。通过拧动调整螺丝210,可以对安装板24的位置进行微调,同时,所述主壳体22侧面安装有用于观察内部安装板24位置的透明亚克力板,使用者可以通过透明亚克力板实时观察安装板24的位置。
33.进一步地,所述导向轴25设置为四个,且四个所述导向轴25呈矩阵装排布,使磁铁26均匀排布,保证取料吸附力的稳定性。
34.以上仅为本申请的优选实施例,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。
技术特征:
1.一种用于cnc的无动力快换磁铁吸爪,其特征在于,包括:用于与cnc的主轴连接的刀柄、用于吸附cnc加工治具的吸爪、用于连接所述刀柄与吸爪的转轴;所述转轴一端与所述刀柄连接,所述刀柄开设有供所述转轴端部活动插入的安装孔,且所述转轴端部与所述安装孔底部之间抵接有第一弹簧;所述转轴另一端与所述吸爪连接,所述吸爪上设有用于安装所述转轴端部的轴承;所述转轴外部套设一套筒,所述刀柄设有供所述套筒一端沿轴向滑动的限位滑槽;所述套筒另一端与所述吸爪固定连接;所述吸爪包括一主壳体,所述主壳体内安装一导轨滑块机构,所述导轨滑块机构上滑动连接一安装板,所述安装板上活动安装有若干平行排布的导向轴,任一所述导向轴上活动穿设一磁铁,且所述磁铁与所述安装板之间抵接有第二弹簧。2.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述刀柄外侧对称安装两拉套,所述限位滑槽位于所述拉套内侧,且所述拉套边缘设有用于防止套筒从所述限位滑槽滑出的挡边。3.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述转轴上设有一轴肩,所述套筒内设有与所述轴肩适配的卡槽,所述转轴上套设有第三弹簧,所述第三弹簧一端与所述轴肩抵接,所述第三弹簧另一端与所述吸爪的主壳体表面抵接。4.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述转轴与所述安装孔连接的端部侧面延其轴向开设有至少一个第一半圆槽,所述安装孔内侧设有与所述第一半圆槽对应的第二半圆槽,所述第一半圆槽和第二半圆槽构成的空间内安装有限位销钉。5.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述导轨滑块机构上安装有用于对安装板的运动进行限位的限位块。6.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述主壳体内安装一定位块,所述定位块上沿安装板的运动方向安装一调整螺丝,所述调整螺丝端部与所述定位块连接。7.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述导向轴设置为四个,且四个所述导向轴呈矩阵装排布。8.如权利要求1所述的用于cnc的无动力快换磁铁吸爪,其特征在于,所述主壳体侧面安装有用于观察内部安装板位置的透明亚克力板。
技术总结
本申请公开了一种用于CNC的无动力快换磁铁吸爪,包括刀柄、吸爪、转轴;转轴一端与刀柄连接,刀柄开设有供转轴端部活动插入的安装孔,且转轴端部与安装孔底部之间抵接有第一弹簧;转轴另一端与吸爪连接,吸爪上设有用于安装转轴端部的轴承;转轴外部套设一套筒,刀柄设有供套筒一端沿轴向滑动的限位滑槽;套筒另一端与吸爪固定连接;吸爪包括一主壳体,主壳体内安装一导轨滑块机构,导轨滑块机构上滑动连接一安装板,安装板上活动安装有若干平行排布的导向轴,任一导向轴上活动穿设一磁铁,且磁铁与安装板之间抵接有第二弹簧。本申请技术方案保证CNC实现自动换料的同时降低成本与技术难度。术难度。术难度。
技术研发人员:戴仙芝 肖云
受保护的技术使用者:深圳市速程精密科技有限公司
技术研发日:2022.08.25
技术公布日:2023/3/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1