一种焊接用点焊机器人的制作方法
本技术涉及焊接装置,具体涉及一种焊接用点焊机器人。
背景技术:
1、焊接技术,又称为连接工程,是一种重要的材料加工工艺。焊接的定义如下:被焊工件的材质,通过加热或者加压或二者并用,并且用或不用填充材料,使工件的材质达到原子间的结合而形成永久性连接的工艺工程称为焊接。
2、现有的焊接机进行焊接时,都是通过焊接头直接焊接在材料的表面上进行焊接,如果需要对材料的背面进行焊接时,就需要将材料进行翻转,而后进行焊接工作,如果焊接时没有标记焊接位置,正面与背面的焊接点也会出现偏差,影响美观的同时,焊接的质量与效率也会大大降低。
3、因此,设计一种焊接用点焊机器人很有必要。
技术实现思路
1、为此,本实用新型提供一种焊接用点焊机器人,通过焊接组件与移动组件,以解决目前现有的焊接机进行焊接时,都是通过焊接头直接焊接在材料的表面上进行焊接,如果需要对材料的背面进行焊接时,就需要将材料进行翻转,而后进行焊接工作,如果焊接时没有标记焊接位置,正面与背面的焊接点也会出现偏差,影响美观的同时,焊接的质量与效率也会大大降低等问题。
2、为了实现上述目的,本实用新型提供如下技术方案:一种焊接用点焊机器人,包括:
3、用于对整个点焊机器人进行转动与支撑的连接杆;
4、用于对原材料的两侧进行同时点焊的焊接组件;
5、用于方便点焊机器人的各种转动与滑动的移动组件,所述移动组件设置在连接杆的两侧。
6、优选的,所述移动组件包括第二转动组件,所述第二转动组件安装在连接杆的下端,所述第二转动组件的侧壁安装有防护板,所述防护板的下端固定连接有支撑板。
7、优选的,所述支撑板的下端安装有第一转动组件,所述第一转动组件的下端安装有第一安装板,所述第一安装板的侧壁固定连接有控制箱。
8、优选的,所述第二转动组件的侧壁固定连接有操作轴,所述连接杆的侧壁安装有第四转动组件,所述第四转动组件的侧壁安装有连接板。
9、优选的,所述连接板的侧壁安装有电动机,所述连接板的一端固定连接有转筒,所述转筒的中部安装有万向节,所述万向节的内壁安装有第三安装板。
10、优选的,所述焊接组件包括第二安装板,所述第二安装板安装在第三安装板的一侧,所述第二安装板的侧壁固定连接有焊接箱,所述焊接箱的上端固定连接有u型板。
11、优选的,所述u型板的上端安装有第三转动组件,所述第三转动组件的内壁固定连接有气压缸,所述气压缸的一端滑动连接有气压柱,所述气压柱的一端转动连接有第二焊接杆。
12、优选的,所述第二焊接杆的两侧转动连接在焊接箱的侧壁上,所述焊接箱的侧壁固定连接有第一焊接杆,所述第一焊接杆设置在第二焊接杆的正下方,所述第一焊接杆和第二焊接杆的一端均安装有焊接头。
13、本实用新型的有益效果是:在点焊机器人的中部设置有多个转动组件,通过多种转动组件之间的配合,可以实现点焊机器人的转动与,前后移动,并且还可以实现其上下移动,从而使点焊机器人的移动范围更加广泛,操作空间更大,并且在点焊的过程中,将原材料放置在工作台上,电焊机器人可以对原材料的上下两侧同时进行焊接,使焊接的质量与效率可以很大的提升,并且还能增加焊接的速度,从而增加生产。
技术特征:
1.一种焊接用点焊机器人,其特征在于,包括:
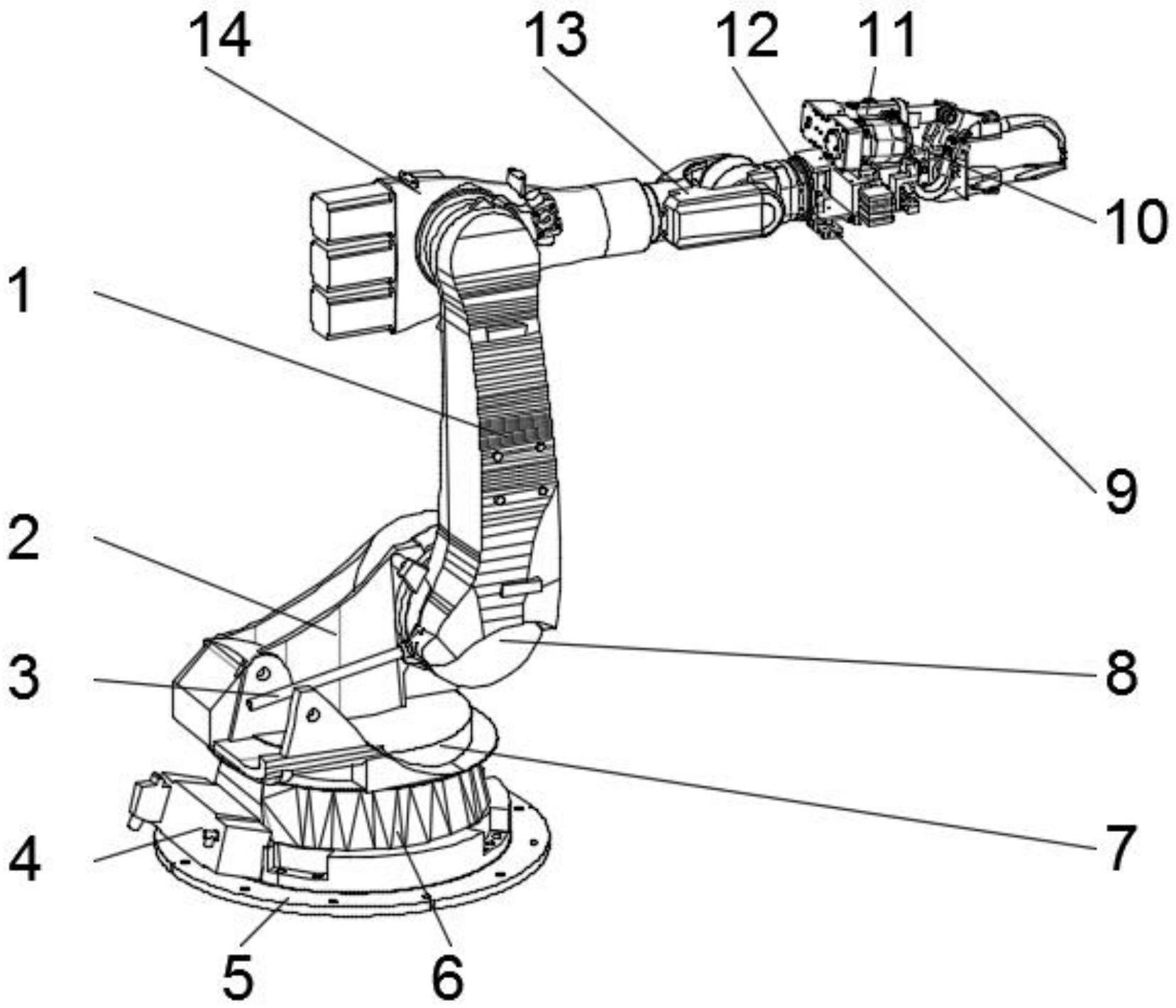
2.根据权利要求1所述的一种焊接用点焊机器人,其特征在于:所述移动组件包括第二转动组件(8),所述第二转动组件(8)安装在连接杆(1)的下端,所述第二转动组件(8)的侧壁安装有防护板(2),所述防护板(2)的下端固定连接有支撑板(7)。
3.根据权利要求2所述的一种焊接用点焊机器人,其特征在于:所述支撑板(7)的下端安装有第一转动组件(6),所述第一转动组件(6)的下端安装有第一安装板(5),所述第一安装板(5)的侧壁固定连接有控制箱(4)。
4.根据权利要求3所述的一种焊接用点焊机器人,其特征在于:所述第二转动组件(8)的侧壁固定连接有操作轴(3),所述连接杆(1)的侧壁安装有第四转动组件(17),所述第四转动组件(17)的侧壁安装有连接板(14)。
5.根据权利要求4所述的一种焊接用点焊机器人,其特征在于:所述连接板(14)的侧壁安装有电动机(16),所述连接板(14)的一端固定连接有转筒(19),所述转筒(19)的中部安装有万向节(13),所述万向节(13)的内壁安装有第三安装板(12)。
6.根据权利要求5所述的一种焊接用点焊机器人,其特征在于:所述焊接组件包括第二安装板(9),所述第二安装板(9)安装在第三安装板(12)的一侧,所述第二安装板(9)的侧壁固定连接有焊接箱(22),所述焊接箱(22)的上端固定连接有u型板(23)。
7.根据权利要求6所述的一种焊接用点焊机器人,其特征在于:所述u型板(23)的上端安装有第三转动组件(10),所述第三转动组件(10)的内壁固定连接有气压缸(11),所述气压缸(11)的一端滑动连接有气压柱(21),所述气压柱(21)的一端转动连接有第二焊接杆(18)。
8.根据权利要求7所述的一种焊接用点焊机器人,其特征在于:所述第二焊接杆(18)的两侧转动连接在焊接箱(22)的侧壁上,所述焊接箱(22)的侧壁固定连接有第一焊接杆(15),所述第一焊接杆(15)设置在第二焊接杆(18)的正下方,所述第一焊接杆(15)和第二焊接杆(18)的一端均安装有焊接头(20)。
技术总结
本技术涉及焊接装置技术领域,具体涉及一种焊接用点焊机器人,包括用于对整个点焊机器人进行转动与支撑的连接杆,用于对原材料的两侧进行同时点焊的焊接组件,用于方便点焊机器人的各种转动与滑动的移动组件,本技术的有益效果是:在点焊机器人的中部设置有多个转动组件,通过多种转动组件之间的配合,可以实现点焊机器人的转动与,前后移动,并且还可以实现其上下移动,从而使点焊机器人的移动范围更加广泛,操作空间更大,并且在点焊的过程中,将原材料放置在工作台上,电焊机器人可以对原材料的上下两侧同时进行焊接,使焊接的质量与效率可以很大的提升,并且还能增加焊接的速度,从而增加生产。
技术研发人员:张明明
受保护的技术使用者:江苏明月图智能装备有限公司
技术研发日:20220906
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!