一种新型机器人焊接夹具用压臂气缸压紧机构的制作方法
1.本实用新型涉及焊接夹具及自动化设备领域,特别涉及一种新型机器人焊接夹具用压臂气缸压紧机构。
背景技术:
2.焊接夹具压臂气缸压紧机构,气缸打开和压紧通过刨销或者压紧块实现对工件压紧限位固定,焊接夹具作业过程中,对产品件重复定位要求高,尤其是定位销的位置要求非常高,这种焊接夹具压臂气缸需要靠限位块来控制刨销和压紧块的位置的精度,目前国内涉及类似情形压紧限位均采用上下凹凸块垂直限位。由于限位块有间隙,及压臂气缸本身有晃量,导致刨销限位精度不高,影响重复精度和焊接质量。
技术实现要素:
3.为解决现有技术存在的问题,本实用新型提供了一种新型机器人焊接夹具用压臂气缸压紧机构,可以改善加工误差,保证了压臂气缸的稳定性,从而保证了定位刨销的精准定位。
4.为了实现上述目的,本实用新型提供的技术方案如下:
5.一种新型机器人焊接夹具用压臂气缸压紧机构,包括侧板、连接块、压臂气缸、气缸压臂、压臂、l块、销座、定位刨销、上凸锥形限位块、下凹锥形限位块、调节垫片。所述压臂气缸上侧安装气缸压臂,所述气缸压臂与压臂固定连接,所述压臂左侧与上凸锥形限位块通过螺栓连接,所述压臂前侧与l块固定连接,所述l块与销座固定连接,所述销座与定位刨销连接,所述定位刨销通过上凸锥形限位块与下凹凸锥形块完全贴合定位。
6.所述压臂气缸上端连接有气缸压臂,所述气缸压臂可以随着压臂气缸进气和出气而上下打开和压紧;所述气缸压臂侧面固定连接压臂,所述压臂前侧与l块固定连接,压臂与l块之间设有调节垫片。所述l块与销座固定连接,销座与定位刨销连接,所述l块与销座之间设有调节垫片。
7.所述压臂左侧与上凸锥形限位块通过螺栓连接;所述压臂气缸左侧连接侧板,侧板上端固定连接下凹锥形限位块。当压臂气缸给气时,所述上凸锥形限位块与所述下凹锥形限位块贴合。
8.进一步地,所述上凸锥形限位块中心有一螺纹孔,与所述压臂通过螺栓连接。所述螺栓可以调节松紧,使上凸锥形限位块能够晃动,使其与下凹锥形限位块紧密贴合,自动找正中心。
9.进一步地,所述气缸压臂可以随着压臂气缸进气出气而打开和压紧;当所述上凸锥形限位块与下凹锥形限位块顶死之后,在相应位置,将所述螺栓拧紧固定,保证上凸锥形限位块与下凹锥形限位块中心在一条直线上。
10.进一步地,所述定位刨销也压紧,所述压臂气缸处于工作状态。
11.与现有技术相比,本实用新型的有益效果是;
12.可以通过调节上凸锥形限位块的位置,使得上凸锥形限位块与下凹锥形限位块能够完全贴合,弥补了压臂气缸本身的晃动量,且在压臂气缸工作状态下是稳定牢固的,保证了压臂气缸的稳定性,从而保证了定位刨销的精准定位。起到了夹具重复压紧精度高,实用性强的作用,提升了焊接合格率,增加了产能,并且通用性良好。
附图说明
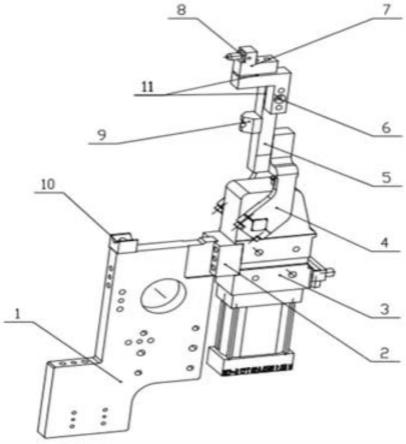
13.图1是本实用新型提供的一种新型机器人焊接夹具用压臂气缸压紧机构的打开状态示意图;
14.图2是本实用新型提供的一种新型机器人焊接夹具用压臂气缸压紧机构的压紧状态示意图;
15.图3是本实用新型提供的一种新型机器人焊接夹具用压臂气缸压紧机构的上凸锥形限位块结构示意图;
16.图4是本实用新型提供的一种新型机器人焊接夹具用压臂气缸压紧机构的下凹锥形限位块结构示意图;
17.其中:
18.1、侧板;2、连接块;3、压臂气缸;4、气缸压臂;5、压臂;6、l块;7、销座;8、定位刨销;9、上凸锥形限位块;10、下凹锥形限位块;11、调节垫片。
具体实施方式
19.为了解决现有技术存在的问题,如图1至图4所示,本实用新型提供了一种新型机器人焊接夹具用压臂气缸压紧机构。包括侧板1、连接块2、压臂气缸3、气缸压臂4、压臂5、l块6、销座7、定位刨销8、上凸锥形限位块9、下凹锥形限位块10、调节垫片11。压臂气缸3上侧安装气缸压臂4,气缸压臂4与压臂5固定连接,压臂5左侧与上凸锥形限位块9通过螺栓连接,压臂5前侧与l块6固定连接,l块6与销座7固定连接,销座7与定位刨销8连接,定位刨销8通过上凸锥形限位块9与下凹凸锥形块10完全贴合定位。
20.压臂气缸3上端连接有气缸压臂4,气缸压臂4可以随着压臂气缸3进气和出气而上下打开和压紧。气缸压臂4侧面固定连接压臂5,压臂5前侧与l块6固定连接,压臂5与l块6之间设有调节垫片11。l块6与销座7固定连接,销座7与定位刨销8连接,l块6与销座7之间设有调节垫片11。压臂5左侧与上凸锥形限位块9通过螺栓连接;压臂气缸3左侧连接侧板1,侧板1上端固定连接下凹锥形限位块10。当压臂气缸3给气时,上凸锥形限位块9与下凹锥形限位块10贴合。
21.当压臂气缸3出气时,气缸压臂4打开,上凸锥形限位块9与下凹锥形限位块10脱离开,定位刨销8也打开,此时压臂气缸压紧机构处于非工作状态。
22.当压臂气缸3给气时,气缸压臂4压紧,这时定位刨销8压紧到位,由于上凸锥形限位块9和下凹锥形限位块10完全贴合,定位刨销8的定位位置精准。
23.本实用新型的工作原理如下:
24.当压臂气缸3给气时,气缸压臂4压紧,贴合前把上凸锥形限位块9和压臂5连接处螺栓完全拧松,等压臂5压紧后,上凸锥形限位块9和下凹锥形限位块10完全贴合后,把上凸锥形限位块9和压臂5连接处的螺栓完全拧紧,保证上凸锥形限位块9和下凹锥形限位块10
完全贴合,克服压臂气缸3的晃动量,从而保证了焊接工件位置的精准性,且重复精度高。
技术特征:
1.一种新型机器人焊接夹具用压臂气缸压紧机构,其特征在于:包括侧板、连接块、压臂气缸、气缸压臂、压臂、l块、销座、定位刨销、上凸锥形限位块、下凹锥形限位块、调整垫片;所述压臂气缸上侧安装气缸压臂,所述气缸压臂与压臂固定连接,所述压臂左侧与上凸锥形限位块通过螺栓连接,所述压臂前侧与l块固定连接,所述l块与销座固定连接,所述销座与定位刨销连接,所述定位刨销通过上凸锥形限位块与下凹凸锥形块完全贴合定位。2.根据权利要求1所述的一种新型机器人焊接夹具用压臂气缸压紧机构,其特征在于:所述压臂气缸上端连接有气缸压臂,所述气缸压臂可以随着压臂气缸进气和出气而上下打开和压紧;所述气缸压臂侧面固定连接压臂,所述压臂前侧与l块固定连接,压臂与l块之间设有调整垫片;所述l块与销座固定连接,销座与定位刨销连接,所述l块与销座之间设有调整垫片。3.根据权利要求1所述的一种新型机器人焊接夹具用压臂气缸压紧机构,其特征在于:所述压臂左侧与上凸锥形限位块通过螺栓连接;所述压臂气缸左侧连接侧板,侧板上端固定连接下凹锥形限位块;当压臂气缸给气时,所述上凸锥形限位块与所述下凹锥形限位块贴合。4.根据权利要求1所述的一种新型机器人焊接夹具用压臂气缸压紧机构,其特征在于:所述上凸锥形限位块中心有一螺纹孔,与所述压臂通过螺栓连接;所述螺栓可以调节松紧,使上凸锥形限位块能够晃动,使其与下凹锥形限位块紧密贴合,自动找正中心。5.根据权利要求1所述的一种新型机器人焊接夹具用压臂气缸压紧机构,其特征在于:所述气缸压臂可以随着压臂气缸进气出气而打开和压紧;当所述上凸锥形限位块与下凹锥形限位块顶死之后,在相应位置,将所述螺栓拧紧固定,保证上凸锥形限位块与下凹锥形限位块中心在一条直线上;所述定位刨销也压紧,所述压臂气缸处于工作状态。
技术总结
本实用新型公开了一种新型机器人焊接夹具用压臂气缸压紧机构。包括侧板、连接块、压臂气缸、气缸压臂、压臂销、L块、销座、定位刨销、上凸锥形限位块、下凹锥形限位块、调整垫。所述压臂气缸上侧安装气缸压臂,所述气缸压臂与压臂销固定连接,所述压臂销左侧与上凸锥形限位块通过螺栓连接,所述压臂销前侧与L块固定连接,所述L块与销座固定连接,所述销座与定位刨销连接,所述定位刨销通过上凸锥形限位块与下凹锥形块完全贴合定位,弥补了压臂气缸本身的晃动量,保证了压臂气缸的稳定性,从而保证了定位刨销的精准定位。起到了夹具重复压紧精度高,实用性强的作用,提升了焊接合格率,增加了产能,并且通用性良好。并且通用性良好。并且通用性良好。
技术研发人员:辛生 刘洪彦 曲盈盈
受保护的技术使用者:沈阳大族赛特维机器人股份有限公司
技术研发日:2022.09.28
技术公布日:2023/3/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1