一种便携式船舶焊接小车的制作方法
本技术涉及焊接小车,尤其涉及一种便携式船舶焊接小车。
背景技术:
1、在进行船舶制造的过程中,会因为甲板和外板的拼接以及下甲板骨架的焊接等任务产生大量的焊接作业需求,但因为船舶的甲板一般由若干块钢板相互焊接而成,基本都是平面,所以可以借助焊接机小车来完成甲板拼接工作,然而由于传统的船舶焊接小车进行焊接工作时一般需要在特定的轨道上进行运动,因此在焊接小车进行焊接作业之前需要先进行轨道的定位和固定,而目前轨道的定位方式大部分都是通过机械结构定位,增加了焊接成本,且不便于更换工作场地,并且传统船舶用焊接小车编程复杂且误差较大,程序一旦设定好后很难更改,另外,当前的船舶用焊接小车构造简单,只能用于直线焊缝等简单结构的焊接工作,适用范围小,有鉴于此,有必要对目前的焊接小车予以改进,以解决上述问题;
2、本背景技术部分中公开的以上信息仅用于理解本发明构思的背景技术,并且因此,它可以包含不构成现有技术的信息。
技术实现思路
1、本实用新型的目的在于提供一种便携式船舶焊接小车,以解决上述背景技术中提出的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种便携式船舶焊接小车,包括底盘、推送臂、摆臂和激光传感器运动轴,所述底盘的底部安装有车轮,所述底盘的顶部中间安装有第一电机,所述底盘的顶部一侧安装有第二电机,所述推送臂的底部传动连接有螺杆,所述推送臂的端部通过传动装置与所述摆臂转动连接,所述摆臂的内部安装有第五电机和线性传动机构,所述摆臂的端部安装有用于散热的风扇,摆臂的末端安装有焊枪,所述激光传感器运动轴外端安装有激光传感器;
4、此外,优选的结构是,所述焊枪为外接焊枪。
5、此外,优选的结构是,所述推送臂上分别安装有第四电机和第三电机,其中第四电机通过传动装置驱动摆臂旋转,第三电机则驱动推送臂进行旋转。
6、此外,优选的结构是,所述第一电机通过蜗杆驱动车轮之间的车轴转动,其中车轮为磁性吸附轮。
7、此外,优选的结构是,所述第一电机的输出轴端部安装有第一伞齿轮,所述蜗杆的端部安装有第二伞齿轮,并且第二伞齿轮与第一伞齿轮之间相互啮合。
8、此外,优选的结构是,所述第二电机输出轴的端部安装有大齿轮,螺杆一侧的端部安装有小齿轮,并且小齿轮与大齿轮之间相互啮合。
9、此外,优选的结构是,所述线性传动机构为丝杠螺母机构,并且第五电机的输出轴与线性传动机构之间为直线传动连接。
10、本实用新型的有益效果是:
11、本实用新型中,通过磁性吸附轮能够使焊接小车易于移动,提高机器人的灵活性,通过多个电机来输出运动,从而提高焊接小车的自由度,增加的自由度使电机直接实现了焊枪的摆动,协调性高,无需特定的轨道,直接可进行焊接作业,甚至是各种较为复杂的焊接作业,因此节省了焊接成本,加之所有运动因为由工控机集中控制,各个方向的动作契合度都有提高,外置于示教器中的计算机根据激光传感器获取的坡口实时位置参数做到针对性的焊接规划轨迹修改,焊接精度也随之提升,另外本实用新型体积小巧轻便,可以根据船舶的焊接需求随时移动至相应焊接场地。
技术特征:
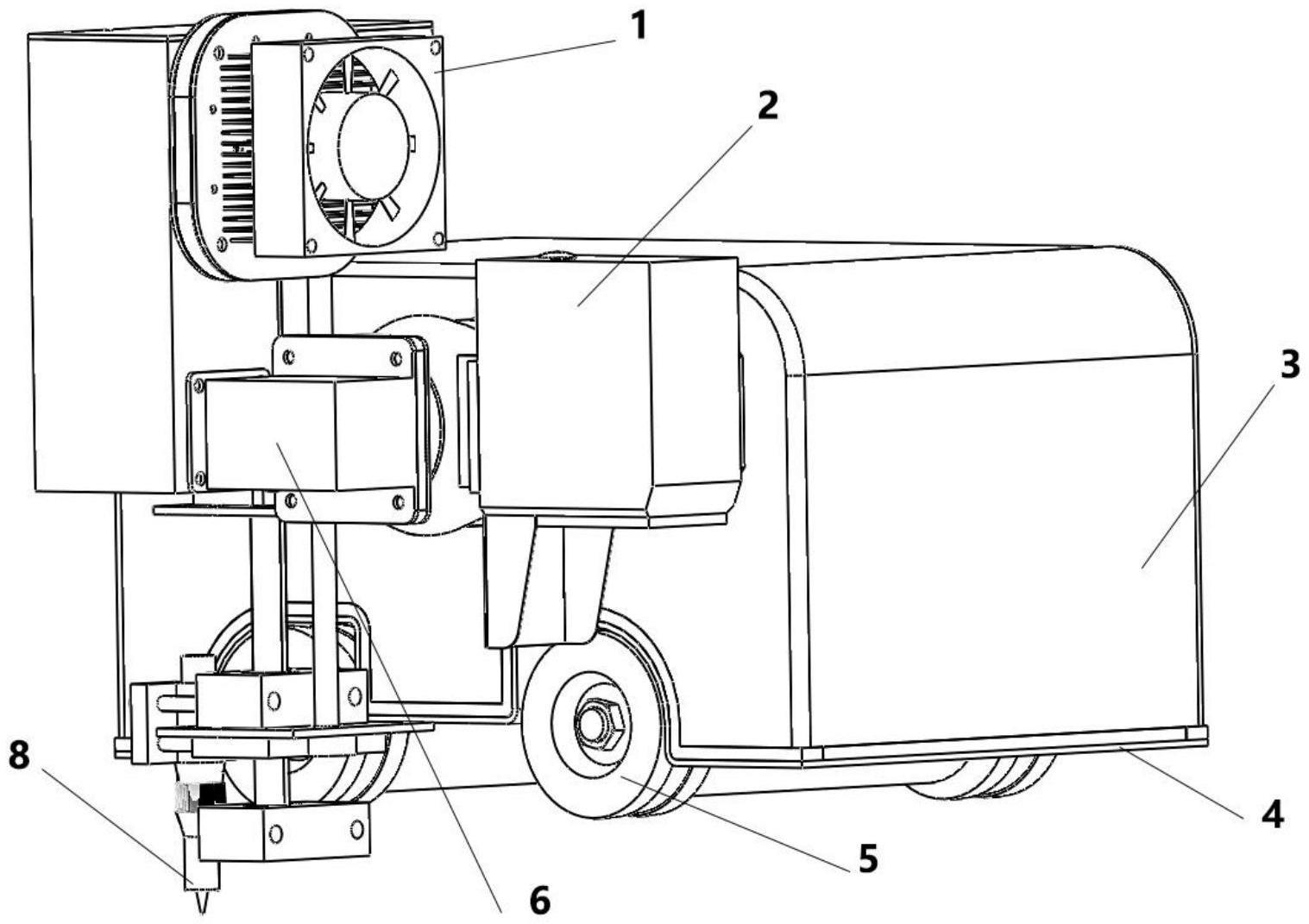
1.一种便携式船舶焊接小车,包括底盘(4)、推送臂(18)、摆臂(7)和激光传感器运动轴(17),其特征在于,所述底盘(4)的底部安装有车轮(5),所述底盘(4)的顶部中间安装有第一电机(9),所述底盘(4)的顶部一侧安装有第二电机(10),所述推送臂(18)的底部传动连接有螺杆(20),所述推送臂(18)的端部通过传动装置(6)与所述摆臂(7)转动连接,所述摆臂(7)的内部安装有第五电机(13)和线性传动机构(19),所述摆臂(7)的端部安装有用于散热的风扇(1),摆臂(7)的末端安装有焊枪(8),所述激光传感器运动轴(17)外端安装有激光传感器(2)。
2.根据权利要求1所述的一种便携式船舶焊接小车,其特征在于,所述焊枪(8)为外接焊枪。
3.根据权利要求1所述的一种便携式船舶焊接小车,其特征在于,所述推送臂(18)上分别安装有第四电机(12)和第三电机(11),其中第四电机(12)通过传动装置(6)驱动摆臂(7)旋转,第三电机(11)则驱动推送臂(18)进行旋转。
4.根据权利要求1所述的一种便携式船舶焊接小车,其特征在于,所述第一电机(9)通过蜗杆(14)驱动车轮(5)之间的车轴转动,其中车轮(5)为磁性吸附轮。
5.根据权利要求4所述的一种便携式船舶焊接小车,其特征在于,所述第一电机(9)的输出轴端部安装有第一伞齿轮,所述蜗杆(14)的端部安装有第二伞齿轮,并且第二伞齿轮与第一伞齿轮之间相互啮合。
6.根据权利要求1所述的一种便携式船舶焊接小车,其特征在于,所述第二电机(10)输出轴的端部安装有大齿轮(16),螺杆(20)一侧的端部安装有小齿轮(15),并且小齿轮(15)与大齿轮(16)之间相互啮合。
7.根据权利要求1所述的一种便携式船舶焊接小车,其特征在于,所述线性传动机构(19)为丝杠螺母机构,并且第五电机(13)的输出轴与线性传动机构(19)之间为直线传动连接。
技术总结
本技术涉及焊接小车技术领域,尤其涉及一种便携式船舶焊接小车,包括底盘、推送臂、摆臂和激光传感器运动轴,所述底盘下安装有车轮,底盘的顶部中间安装有第一电机,底盘顶部的一侧安装有第二电机,推送臂的底部传动连接有螺杆,推送臂通过传动装置与摆臂连接,摆臂内设有第五电机和线性传动机构,摆臂的端部安装有风扇,摆臂的末端安装有焊枪,激光传感器运动轴外端安装有激光传感器。本技术中,通过多个电机来实现焊枪的摆动,协调性高,无需特定的轨道,直接可进行焊接作业,激光传感器扫描焊缝坡口并通过人工智能训练的手法进行焊接,可自动焊接船舶上的复杂焊缝,提高效率节约成本。
技术研发人员:陈轩
受保护的技术使用者:江苏道尔芬智能制造有限公司
技术研发日:20221116
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!