一种防止掉落的自动装配机器人的制作方法
本技术涉及自动装配机器人,具体为一种防止掉落的自动装配机器人。
背景技术:
1、在进行工件装配过程中,通过利用自动装配机器人能够将工件之间进行按压,保证工件之间拼接牢固,使得工件在后续使用时能够更加的牢固,保证整体使用时的稳定性和适用性,避免出现工件松脱的情况。
2、在中国实用新型专利中,如cn211590100u的本实用新型涉及装配机器人技术领域,具体地说是一种带夹爪的自动装配机器人装置,其包括桁架机器人、沿桁架机器人长度方向设在桁架机器人顶部横梁下表面的机器人导轨、与机器人导轨轨接的机器人手臂、与机器人手臂连接的夹爪;所述的夹爪包括设若干弧形的导向孔的导向孔板,顶部滑动连接于导向孔内的若干夹指,与夹指轨接的若干导轨,驱动导向孔板旋转的驱动装置。本实用新型与现有技术相比,可实现自动化更换,减轻劳动力;其通过夹爪上的轴向压紧装置可将轴承端盖压紧在一起随轴承搬运,在搬运过程轴承不散落各部件保持。
3、针对现有技术存在以下问题:
4、1、现有技术中装配机器人在使用时容易出现工件掉落的情况。
5、2、现有技术中装配机器人的夹持板在磨损后不便于进行更换。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种防止掉落的自动装配机器人,具备防止工件掉落等优点,解决了上述背景技术中的问题。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种防止掉落的自动装配机器人,包括顶板,所述顶板的底端固定连接有安装盒,所述安装盒的一侧固定连接有驱动电机,所述驱动电机的输出端延伸至安装盒的内部并通过联轴器固定连接有螺纹杆,所述螺纹杆外部的两侧均套设有活动块,所述活动块的底端固定连接有夹持板,所述夹持板的一侧通过拆装结构卡合连接有缓冲层,所述缓冲层一侧的下端活动连接有防掉落结构。
5、所述防掉落结构包括固定盒,所述固定盒固定连接于缓冲层一侧的下端,所述固定盒的内部卡合连接有固定杆,所述固定杆的一侧延伸至固定盒外部的一侧,通过利用防掉落结构能够避免工件在夹持时出现掉落的情况,保证整体在使用时的稳定性,通过将固定杆插入固定盒的内部,通过利用固定杆能够将工件底部进行支撑,避免出现工件掉落的情况。
6、优选的,所述固定盒的底端螺纹连接有螺栓,且固定杆底端的一侧开设有与螺栓相匹配的螺纹槽,通过螺栓和螺纹槽之间螺纹连接,从而能够对固定杆的位置进行二次限制,避免固定杆从固定盒的内部脱落。
7、优选的,所述固定盒底端靠近螺栓的一侧固定连接有连接板,且连接板的一侧卡合连接有卡块,通过卡块能够对螺栓的位置进行限制,避免螺栓因装置整体震动造成的松动。
8、优选的,所述卡块的横截面呈t形,且卡块的一侧穿过连接板并延伸至螺栓的下方,通过卡块的形状能够便于进行抽拉,防止滑脱。
9、优选的,所述卡块一侧的上端和下端均固定连接有复位弹簧,且复位弹簧与连接板之间呈焊接一体化结构,通过复位弹簧的弹力能够快速将卡块弹出并辅助卡块进行位置上的限制。
10、优选的,所述拆装结构包括固定板,所述固定板固定连接于夹持板一侧的上端和下端,且固定板的顶端固定连接有连接弹簧,且连接弹簧的顶端固定连接有限位杆,且缓冲层的顶端和底端均开设有与限位杆相匹配的限位槽,通过利用拆装结构能够避免缓冲层出现磨损后不便于进行更换的问题,增加使用时的稳定性,通过将限位杆与限位槽之间相互配合使得缓冲层的位置能够被安装,通过利用限位杆和限位槽也能够快速实现拆卸,保证整体使用时的灵活性。
11、优选的,所述限位杆的横截面呈l形,且限位杆的一端延伸至缓冲层的内部,通过限位杆的形状能够快速进行抽拉拆卸,增加使用时的适用性。
12、有益效果
13、与现有技术相比,本实用新型提供了一种防止掉落的自动装配机器人,具备以下有益效果:
14、1、该防止掉落的自动装配机器人,通过利用防掉落结构能够避免工件在夹持时出现掉落的情况,保证整体在使用时的稳定性,通过将固定杆插入固定盒的内部,通过利用固定杆能够将工件底部进行支撑,避免出现工件掉落的情况,通过螺栓和螺纹槽之间螺纹连接,从而能够对固定杆的位置进行二次限制,避免固定杆从固定盒的内部脱落,通过卡块能够对螺栓的位置进行限制,避免螺栓因装置整体震动造成的松动,通过复位弹簧的弹力能够快速将卡块弹出并辅助卡块进行位置上的限制。
15、2、该防止掉落的自动装配机器人,通过利用拆装结构能够避免缓冲层出现磨损后不便于进行更换的问题,增加使用时的稳定性,通过将限位杆与限位槽之间相互配合使得缓冲层的位置能够被安装,通过利用限位杆和限位槽也能够快速实现拆卸,保证整体使用时的灵活性,通过连接弹簧的弹力便于将限位杆进行位置上的复位,通过限位杆的形状能够快速进行抽拉拆卸,增加使用时的适用性。
技术特征:
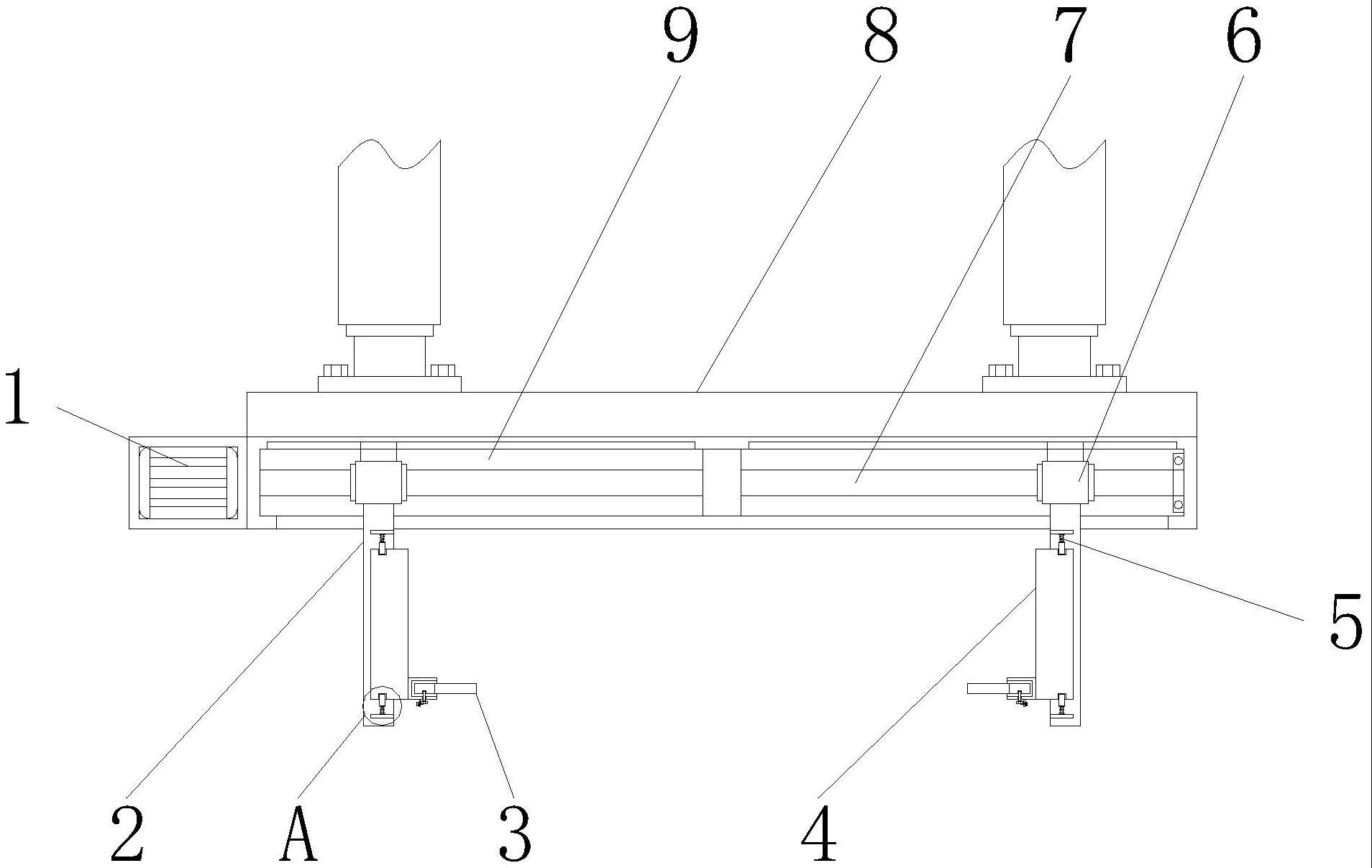
1.一种防止掉落的自动装配机器人,包括顶板(8),其特征在于:所述顶板(8)的底端固定连接有安装盒(9),所述安装盒(9)的一侧固定连接有驱动电机(1),所述驱动电机(1)的输出端延伸至安装盒(9)的内部并通过联轴器固定连接有螺纹杆(7),所述螺纹杆(7)外部的两侧均套设有活动块(6),所述活动块(6)的底端固定连接有夹持板(2),所述夹持板(2)的一侧通过拆装结构(5)卡合连接有缓冲层(4),所述缓冲层(4)一侧的下端活动连接有防掉落结构(3);
2.根据权利要求1所述的一种防止掉落的自动装配机器人,其特征在于:所述固定盒(301)的底端螺纹连接有螺栓(306),且固定杆(302)底端的一侧开设有与螺栓(306)相匹配的螺纹槽(307)。
3.根据权利要求2所述的一种防止掉落的自动装配机器人,其特征在于:所述固定盒(301)底端靠近螺栓(306)的一侧固定连接有连接板(303),且连接板(303)的一侧卡合连接有卡块(304)。
4.根据权利要求3所述的一种防止掉落的自动装配机器人,其特征在于:所述卡块(304)的横截面呈t形,且卡块(304)的一侧穿过连接板(303)并延伸至螺栓(306)的下方。
5.根据权利要求4所述的一种防止掉落的自动装配机器人,其特征在于:所述卡块(304)一侧的上端和下端均固定连接有复位弹簧(305),且复位弹簧(305)与连接板(303)之间呈焊接一体化结构。
6.根据权利要求1所述的一种防止掉落的自动装配机器人,其特征在于:所述拆装结构(5)包括固定板(503),所述固定板(503)固定连接于夹持板(2)一侧的上端和下端,且固定板(503)的顶端固定连接有连接弹簧(502),且连接弹簧(502)的顶端固定连接有限位杆(501),且缓冲层(4)的顶端和底端均开设有与限位杆(501)相匹配的限位槽(504)。
7.根据权利要求6所述的一种防止掉落的自动装配机器人,其特征在于:所述限位杆(501)的横截面呈l形,且限位杆(501)的一端延伸至缓冲层(4)的内部。
技术总结
本技术涉及自动装配机器人技术领域,且公开了一种防止掉落的自动装配机器人,包括顶板,所述顶板的底端固定连接有安装盒,所述安装盒的一侧固定连接有驱动电机,所述驱动电机的输出端延伸至安装盒的内部并通过联轴器固定连接有螺纹杆,所述螺纹杆外部的两侧均套设有活动块。该防止掉落的自动装配机器人,通过利用防掉落结构能够避免工件在夹持时出现掉落的情况,通过将固定杆插入固定盒的内部,通过利用固定杆能够将工件底部进行支撑,避免出现工件掉落的情况,通过螺栓和螺纹槽之间螺纹连接,从而能够对固定杆的位置进行二次限制,避免固定杆从固定盒的内部脱落,通过卡块能够对螺栓的位置进行限制,避免螺栓因装置整体震动造成的松动。
技术研发人员:贾瑞永
受保护的技术使用者:聚鑫博惠智能装备(天津)有限公司
技术研发日:20221117
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!