一种焊丝矫直装置的制作方法
本技术属于焊丝生产,特别涉及一种焊丝矫直装置。
背景技术:
1、机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等),在对机器人进行焊接时需要用到焊丝,焊丝在生产时会通过收卷筒进行收卷,后续使用时需要使用矫直装置对完全的焊丝进行矫直处理。
2、现有专利一种焊接机器人用焊丝生产用矫直装置调节相对应的矫直辊之间的距离,来适用于不同直径的焊丝的矫直;通过滑动调节组件,调整第二支撑板的位置,便于收卷筒的拆卸和更换。但是上述专利存在以下的缺陷:缺少张力调整机构会导致焊丝输送前进效果较差,且通过设置丝杆实现双矫直辊上下距离的调整,导致装置稳定性低。
技术实现思路
1、为解决现有技术中存在的问题,本实用新型的提供一种焊丝矫直装置。
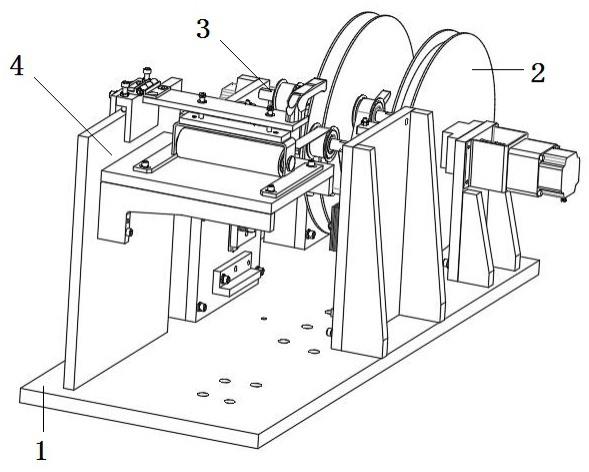
2、为实现上述目的,本实用新型提供如下技术方案:一种焊丝矫直装置,包括底板,所述底板上对称固定有焊丝输送机构,所述焊丝输送装置包括焊丝盘旋转机构和张力调整机构,所述张力调整机构的一侧设有矫直机构;
3、所述焊丝盘旋转机构包括第一固定板,所述第一固定板上安装有步进电机,所述步进电机的输出轴通过联轴器和转轴相连,所述转轴上设有焊丝盘本体;
4、所述张力调整机构包括第二固定板,所述第二固定板上安装有位于同一直线的第一惰轮和第二惰轮,所述第一惰轮和第二惰轮的下方中心线上,第二固定板通过滑轨机构滑动安装有第三惰轮;
5、所述矫直机构包括第三固定板,所述第三固定板上固定有安装支架,所述安装支架上固定有支撑板,所述支撑板上对称设有限位板,所述第三固定板上通过铰接机构铰接有矫直辊,所述矫直辊在矫直时位于两个限位板之间的区域。
6、进一步的,所述铰接机构包括u型卡板,所述u型卡板的卡在第三固定板上,所述u型卡板的顶部固定有蝶形铰链,所述蝶形铰链的一个页片固定在u型卡板的顶面,另外一个页片固定在安装板上,所述安装板的底部固定有金属板,所述金属板上固定有滚轮支架,所述矫直辊与滚轮支架相连。
7、进一步的,所述安装板的顶面上固定有悬臂拉手。
8、进一步的,所述u型卡板包括竖直板和l型板,所述l型板和竖直板通过螺栓组件相连,所述l型板的横板上对称设有外螺纹型等高螺栓,通过外螺纹型等高螺栓调节l型板的横板和第三固定板之间的距离进而调整矫直辊与支撑板之间的距离。
9、进一步的,所述滑轨机构包括在固定在第二固定板上的滑轨,所述滑轨上设有滑块,所述滑块上固定有移动板,所述第三惰轮固定在移动板的顶部,所述第三惰轮的下方,移动板上固定有配重块。
10、进一步的,所述第一惰轮和第二惰轮中间,第三固定板上安装有定位调整螺丝块,所述定位调整螺丝块上设有限位螺栓,所述移动板上设有定位销,所述定位销和限位螺栓位于同一条竖直线上。
11、进一步的,所述滑轨的下方,第三固定板上设有锁定定位块,所述锁定定位块的截面形状为l型,所述锁定定位块的立板固定在第三固定板上。
12、本实用新型的有益技术效果:
13、(1)通过旋转机构实现焊丝盘本体的旋转,然后张力机构实现张力的调整,保证焊丝的输送前进的平稳性,通过矫直辊和支撑板之间的距离调整,实现焊丝的矫直。
14、(2)在张力机构中,第三惰轮是安装在滑轨上,通过滑块在滑轨上移动,实现第三惰轮的上下移动,进而实现张力的调节。
15、(3)通过设置限位螺栓和定位销以及锁定定位块实现对移动板的上下移动的限位,防止滑块脱出滑轨。
16、(4)本申请将矫直辊铰接在第三固定板上,方便焊丝的放入并且矫直辊是通过可拆卸u型卡板进行连接,u型卡板包括包括竖直板和l型板, l型板的横板上对称设有外螺纹型等高螺栓,通过外螺纹型等高螺栓调节l型板的横板和第三固定板之间的距离进而调整矫直辊与支撑板之间的距离,进而调节矫直辊的压力。
技术特征:
1.一种焊丝矫直装置,其特征在于:包括底板(1),所述底板(1)上对称固定有焊丝输送机构,所述焊丝输送机构包括焊丝盘旋转机构(2)和张力调整机构(3),所述张力调整机构(3)的一侧设有矫直机构(4);
2.根据权利要求1所述的焊丝矫直装置,其特征在于:所述铰接机构包括u型卡板(17),所述u型卡板(17)的卡在第三固定板(13)上,所述u型卡板(17)的顶部固定有蝶形铰链(18),所述蝶形铰链(18)的一个页片固定在u型卡板(17)的顶面,另外一个页片固定在安装板(19)上,所述安装板(19)的底部固定有金属板(20),所述金属板(20)上固定有滚轮支架(21),所述矫直辊(16)与滚轮支架(21)相连。
3.根据权利要求2所述的焊丝矫直装置,其特征在于:所述安装板(19)的顶面上固定有悬臂拉手(22)。
4.根据权利要求2所述的焊丝矫直装置,其特征在于:所述u型卡板(17)包括竖直板(23)和l型板(24),所述l型板(24)和竖直板(23)通过螺栓组件相连,所述l型板(24)的横板上对称设有外螺纹型等高螺栓(25),通过外螺纹型等高螺栓(25)调节l型板(24)的横板和第三固定板(13)之间的距离进而调整矫直辊(16)与支撑板(15)之间的距离。
5.根据权利要求1所述的焊丝矫直装置,其特征在于:所述滑轨机构包括在固定在第二固定板(8)上的滑轨(26),所述滑轨(26)上设有滑块,所述滑块上固定有移动板(27),所述第三惰轮(12)固定在移动板(27)的顶部,所述第三惰轮(12)的下方,移动板(27)上固定有配重块(28)。
6.根据权利要求5所述的焊丝矫直装置,其特征在于:所述第一惰轮(9)和第二惰轮(10)中间,第三固定板(13)上安装有定位调整螺丝块(29),所述定位调整螺丝块(29)上设有限位螺栓(30),所述移动板(27)上设有定位销(31),所述定位销(31)和限位螺栓(30)位于同一条竖直线上。
7.根据权利要求5所述的焊丝矫直装置,其特征在于:所述滑轨(26)的下方,第三固定板(13)上设有锁定定位块(32),所述锁定定位块(32)的截面形状为l型,所述锁定定位块(32)的立板固定在第三固定板(13)上。
技术总结
本技术属于焊丝生产技术领域,特别涉及一种焊丝矫直装置,包括底板,所述底板上对称固定有焊丝输送机构,所述焊丝输送装置包括焊丝盘旋转机构和张力调整机构,所述张力调整机构的一侧设有矫直机构。通过焊丝盘旋转机构实现焊丝盘本体的旋转,然后张力调整机构实现张力的调整,保证焊丝的输送前进的平稳性,通过矫直机构的矫直辊和支撑板之间的距离调整,实现焊丝的矫直。
技术研发人员:张宗辉,王本胜
受保护的技术使用者:济南法瑞钠焊接器材股份有限公司
技术研发日:20221122
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!