工业机器人定位活动轨生产用夹紧工装的制作方法
本技术涉及夹紧工装,具体为工业机器人定位活动轨生产用夹紧工装。
背景技术:
1、中国专利公开了一种墙板生产线的工装板夹紧结构(公开号:cn211193608u),该专利包括工装板、套管、插杆、压板、销轴、支板、安装块和卡齿,所述套管镶嵌在工装板的内部,所述插杆活动插接在套管的内部,所述压板固定连接在插杆的顶部,所述插杆的两侧对称镶嵌有齿条,所述套管的两侧均固定连接有支座,所述支板通过销轴活动连接在支座的正面,所述安装块固定连接在支板的顶部。该实用新型向内侧按压支板的底部,会使得支板以销轴为支点进行转动,通过安装块带动卡齿向外侧移动,使得卡齿与齿条分离,这时,可以使得插杆在套管的内部进行移动,方便对压板的高度进行调节,使用方便,利于对不同厚度的板材进行夹紧固定,保证了板材的稳定性。
2、上述专利中,对于墙板在竖直方向上进行夹持,但是在水平方向上难以实现定位效果,容易导致工件在加工时产生位置的偏差,降低加工精度,影响加工效果。
3、为了解决上述缺陷,现提供一种技术方案。
技术实现思路
1、本实用新型的目的在于提供工业机器人定位活动轨生产用夹紧工装。
2、本实用新型所要解决的技术问题如下:
3、现有技术中,对于墙板在竖直方向上进行夹持,但是在水平方向上难以实现定位效果,容易导致工件在加工时产生位置的偏差,降低加工精度,影响加工效果。
4、本实用新型的目的可以通过以下技术方案实现:
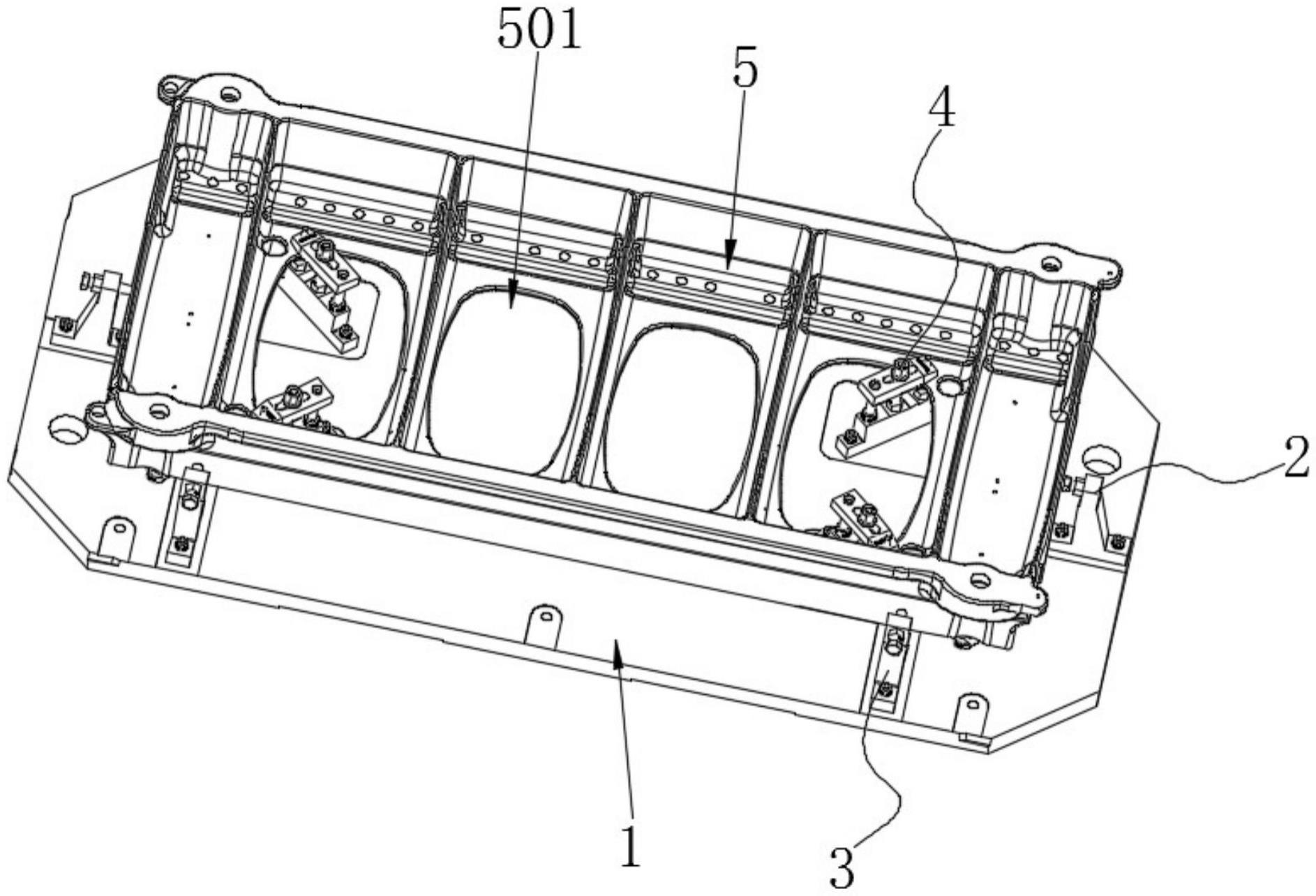
5、工业机器人定位活动轨生产用夹紧工装,包括工装板,所述工装板的顶部两端均设置有第一定位机构,工装板的顶部两侧均对称设置有两个第二定位机构,工装板的顶部两端靠近中心的位置均对称设置有夹持机构,工装板顶部设置有轨道本体;
6、所述夹持机构包括固定在工装板顶部的夹持座,夹持座的顶部一端转动连接有旋转轴,旋转轴的顶端滑动套接有夹持板,夹持板的中部贯穿开设有调节槽,调节槽内滑动设置有固定轴,夹持座的顶部开设有若干固定槽,固定轴的底端位于固定槽内,固定轴的顶端固定有限位板。
7、进一步的,所述轨道本体的中部贯穿开设有若干加工槽。
8、进一步的,所述第一定位机构和第二定位机构结构相同,所述第一定位机构包括固定在工装板顶部的定位板,定位板的顶部设置有定位轴,定位轴贯穿定位板且与定位板螺纹连接,定位轴的外表面套接有第一紧固螺栓,第一紧固螺栓与定位轴螺纹连接。
9、进一步的,所述定位轴的一端用于对轨道本体进行定位,定位轴的另一端固定有定位把手。
10、进一步的,夹持座的顶部一端固定连接有第一夹持块,夹持板远离旋转轴的一端设置有夹持轴,夹持轴的底端固定有第二夹持块,夹持轴与夹持板螺纹连接。
11、进一步的,所述夹持座的底部通过螺栓固定安装在工装板顶部,固定轴的外表面螺栓套接有第二紧固螺栓。
12、本实用新型的有益效果:
13、本实用新型中通过所述夹持机构的设置,使得轨道本体放置在工装板上,通过旋转轴在夹持座上转动带动夹持板穿过加工槽转向工装板上方,夹持板在旋转轴上向下滑动并压住轨道本体,并且固定轴伸入固定槽内,并在第二紧固螺栓的作用下对夹持板进行限位,另外,通过夹持轴转动带动第二夹持块下移,配合第一夹持块对轨道本体进行稳定夹持,进一步提高夹持机构夹持的稳定性,增加调节能力。
14、通过所述第一定位机构的设置,使得转动定位把手带动定位轴转动,使得定位轴在定位板上伸缩,使得定位轴接触轨道本体并对其进行定位,设置的第一紧固螺栓可在定位轴上旋转,进而配合与定位板之间的摩擦力对定位轴进行限位,提高定位效果。
技术特征:
1.工业机器人定位活动轨生产用夹紧工装,包括工装板(1),其特征在于,所述工装板(1)的顶部两端均设置有第一定位机构(2),工装板(1)的顶部两侧均对称设置有两个第二定位机构(3),工装板(1)的顶部两端靠近中心的位置均对称设置有夹持机构(4),工装板(1)顶部设置有轨道本体(5);
2.根据权利要求1所述的工业机器人定位活动轨生产用夹紧工装,其特征在于,所述轨道本体(5)的中部贯穿开设有若干加工槽(501)。
3.根据权利要求1所述的工业机器人定位活动轨生产用夹紧工装,其特征在于,所述第一定位机构(2)和第二定位机构(3)结构相同,所述第一定位机构(2)包括固定在工装板(1)顶部的定位板(201),定位板(201)的顶部设置有定位轴(202),定位轴(202)贯穿定位板(201)且与定位板(201)螺纹连接,定位轴(202)的外表面套接有第一紧固螺栓(203),第一紧固螺栓(203)与定位轴(202)螺纹连接。
4.根据权利要求3所述的工业机器人定位活动轨生产用夹紧工装,其特征在于,所述定位轴(202)的一端用于对轨道本体(5)进行定位,定位轴(202)的另一端固定有定位把手(204)。
5.根据权利要求1所述的工业机器人定位活动轨生产用夹紧工装,其特征在于,夹持座(401)的顶部一端固定连接有第一夹持块(407),夹持板(403)远离旋转轴(402)的一端设置有夹持轴(408),夹持轴(408)的底端固定有第二夹持块(409),夹持轴(408)与夹持板(403)螺纹连接。
6.根据权利要求1所述的工业机器人定位活动轨生产用夹紧工装,其特征在于,所述夹持座(401)的底部通过螺栓固定安装在工装板(1)顶部,固定轴(405)的外表面螺栓套接有第二紧固螺栓(410)。
技术总结
本技术涉及工业机器人定位活动轨生产用夹紧工装,包括工装板,所述工装板的顶部两端均设置有第一定位机构,工装板的顶部两侧均对称设置有两个第二定位机构,工装板的顶部两端靠近中心的位置均对称设置有夹持机构,工装板顶部设置有轨道本体;所述夹持机构包括固定在工装板顶部的夹持座,夹持座的顶部一端转动连接有旋转轴,旋转轴的顶端滑动套接有夹持板,夹持板的中部贯穿开设有调节槽,调节槽内滑动设置有固定轴,夹持座的顶部开设有若干固定槽;解决了现有技术中,对于墙板在竖直方向上进行夹持,但是在水平方向上难以实现定位效果,容易导致工件在加工时产生位置的偏差,降低加工精度,影响加工效果等问题。
技术研发人员:肖强,姜东旭,杨宏
受保护的技术使用者:安徽涌诚机械有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!