一种机器人滚边头切换装置的制作方法
本技术涉及滚边头切换,具体是一种机器人滚边头切换装置。
背景技术:
1、机器人通过机械臂带动滚边头和滚轮进行滚边压合的操作,在汽车制造的领域已经被应用的非常广泛,例如像车门、机盖、轮罩等位置进行滚边的操作,通过滚边头和滚轮所施加的压力,使得待滚边处的位置形成包边的结构,从而提高了滚边作业效率和质量。
2、在专利号为cn202022183822.1的专利中公开了一种机器人滚边头快速切换装置,切换装置包括压料芯架、滚边头、连接角座以及切换盘;滚边头一端固定连接于连接角座的一端,连接角座的另一端与机器人固定连接;滚边头另一端设有滚轮;压料芯架通过切换盘可分离设置于连接角座的底部,压料芯架上设有工件压料装置及工件抓取部件;能够解决现有汽车行业焊装自动化生产线机器人滚边切换的问题,提升生产节拍,降低投资成本,最大限度的满足滚边节拍、切换、取放件等功能,同时可以提高生产效率、降低成本。
3、上述装置在进行使用时存在一定不足:在车辆的部件生产当中,例如车门、机盖、轮罩等不同的位置进行滚边的操作,但是所使用的滚边头都是不同的,需要滚边不同的车辆部件需要对滚边头进行切换,但是连接角座通过铁板和方管焊接而成并采用螺接装配,滚边头与连接角座固定,连接角座通过法兰盘与机器人固定,所以在对滚边头进行更换的时候,通过扳手将法兰盘的螺栓拆除,将整个连接角座和滚边头拆下,非常地费时费力,不能快速的完成对滚边头安装切换的工作。
4、为此,本实用新型提供了一种机器人滚边头切换装置,以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种机器人滚边头切换装置,解决了上述问题。
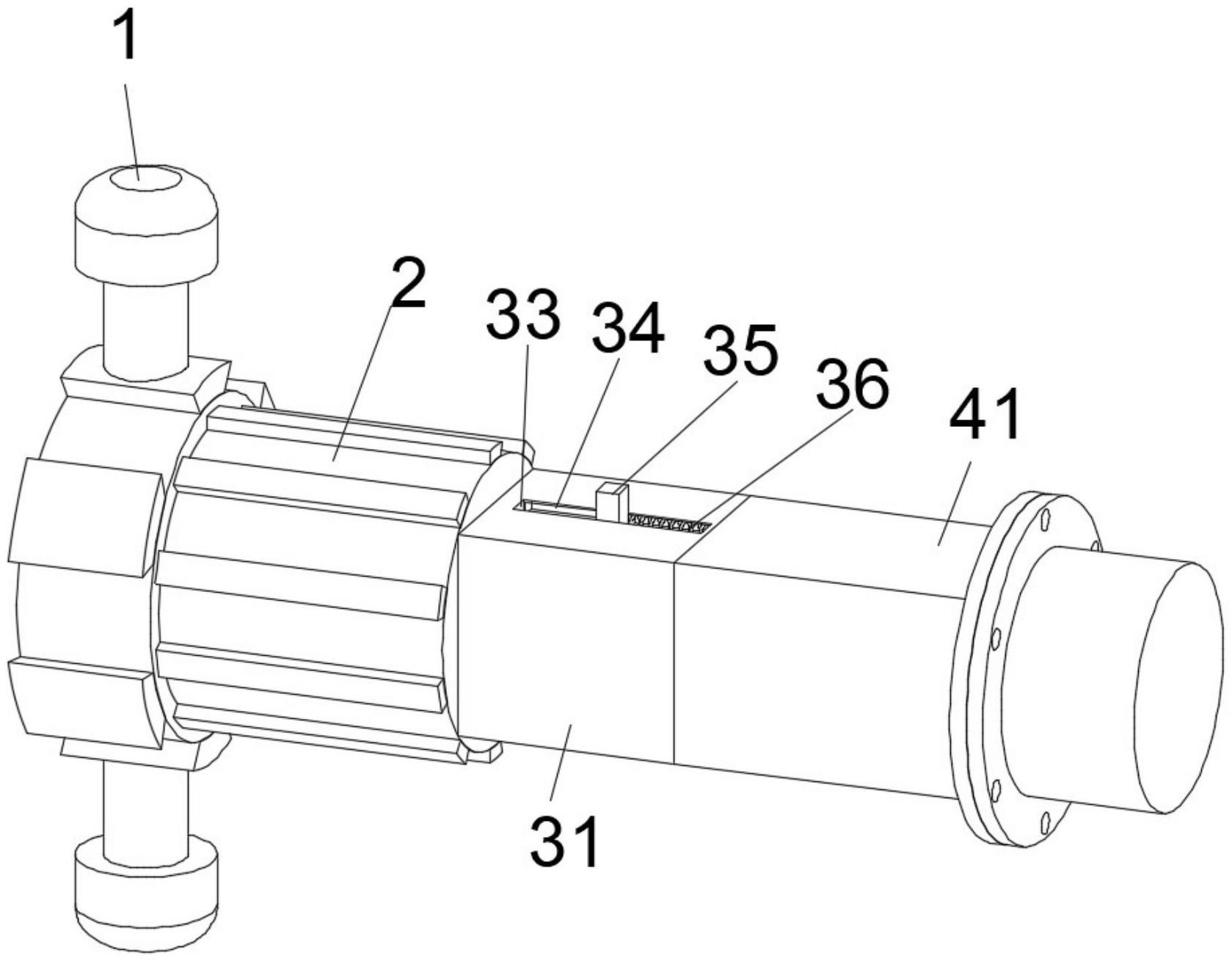
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种机器人滚边头切换装置,包括滚边头本体、以及安装在滚边头本体左侧的滚轮,所述滚边头本体右壁安装有限位组件,所述限位组件右侧安装有切换组件,所述切换组件右壁通过六轴法兰盘与机器人固定连接;
3、所述切换组件包括安装块,所述安装块侧壁开设有空腔,所述空腔顶壁和底壁均固定连接有l型弹性板,所述l型弹性板相邻的一侧均固定连接有三角挡块,所述限位组件右壁固定连接有连杆,所述连杆右端固定连接有限位块。
4、进一步的,所述安装块通过六轴法兰盘与机器人固定连接,所述限位块外壁均与三角挡块外壁贴合。
5、通过上述技术方案,限位块与三角挡块相互卡接快速完成对滚边头本体的安装。
6、进一步的,所述限位组件包括放置块,所述放置块左壁与滚边头本体固定连接,所述放置块右壁顶部和底部均开设有容纳槽。
7、通过上述技术方案,容纳槽主要是用于容纳滑动板。
8、进一步的,所述放置块顶壁和底壁均开设有贯穿槽,所述贯穿槽均与对应的容纳槽相连通。
9、通过上述技术方案,贯穿槽主要用于容纳操控块进行左右滑动。
10、进一步的,所述贯穿槽前后壁均开设有放置槽,所述放置槽右壁均固定连接有弹簧,所述弹簧左端均固定连接有限位滑块。
11、通过上述技术方案,限位滑块与放置槽相互匹配,在放置槽内进行滑动。
12、进一步的,所述限位滑块均与对应的放置槽内壁滑动连接,所述容纳槽内壁均滑动连接有滑动板。
13、通过上述技术方案,滑动板主要防止l型弹性板发生形变。
14、进一步的,所述滑动板相互远离的一侧均固定连接有操控块,所述操控块外壁均与对应的贯穿槽内壁贴合。
15、通过上述技术方案,操控块带动限位滑块在放置槽内进行滑动。
16、进一步的,所述操控块外壁均与对应的限位滑块固定连接,所述滑动板外壁均与对应的l型弹性板外壁贴合。
17、通过上述技术方案,滑动板主要防止l型弹性板发生形变。
18、有益效果
19、本实用新型提供了一种机器人滚边头切换装置。与现有技术相比具备以下有益效果:
20、(1)、该机器人滚边头切换装置,通过拉动放置块带动连杆和限位块活动,限位块挤压三角挡块,三角挡块同时带动l型弹性板活动,限位块脱离与三角挡块的接触,使得当切换滚边头本体的时候,不需要使用专用工具就能够快速地完成拆卸切换的工作,整个的操作简单快捷省时省力,整个的装置的实用性得到提升。
21、(2)、该机器人滚边头切换装置,通过推动操控块在贯穿槽滑动,带动限位滑块在放置槽内滑动,拉伸对应的弹簧,操控块带动滑动板脱离与l型弹性板的接触,进入到容纳槽中,使得限位组件的设置,当安装完成时候滚边头本体安装完成之后,能够牢固的与切换组件相互卡接限位,在工作的时候滚边头本体不会发生脱离等问题,安全性更高。
技术特征:
1.一种机器人滚边头切换装置,包括滚边头本体(2)、以及安装在滚边头本体(2)左侧的滚轮(1),其特征在于:所述滚边头本体(2)右壁安装有限位组件(3),所述限位组件(3)右侧安装有切换组件(4),所述切换组件(4)右壁通过六轴法兰盘与机器人固定连接;
2.根据权利要求1所述的一种机器人滚边头切换装置,其特征在于:所述安装块(41)通过六轴法兰盘与机器人固定连接,所述限位块(44)外壁均与三角挡块(46)外壁贴合。
3.根据权利要求1所述的一种机器人滚边头切换装置,其特征在于:所述限位组件(3)包括放置块(31),所述放置块(31)左壁与滚边头本体(2)固定连接,所述放置块(31)右壁顶部和底部均开设有容纳槽(32)。
4.根据权利要求3所述的一种机器人滚边头切换装置,其特征在于:所述放置块(31)顶壁和底壁均开设有贯穿槽(33),所述贯穿槽(33)均与对应的容纳槽(32)相连通。
5.根据权利要求4所述的一种机器人滚边头切换装置,其特征在于:所述贯穿槽(33)前后壁均开设有放置槽(34),所述放置槽(34)右壁均固定连接有弹簧(36),所述弹簧(36)左端均固定连接有限位滑块(38)。
6.根据权利要求5所述的一种机器人滚边头切换装置,其特征在于:所述限位滑块(38)均与对应的放置槽(34)内壁滑动连接,所述容纳槽(32)内壁均滑动连接有滑动板(37)。
7.根据权利要求6所述的一种机器人滚边头切换装置,其特征在于:所述滑动板(37)相互远离的一侧均固定连接有操控块(35),所述操控块(35)外壁均与对应的贯穿槽(33)内壁贴合。
8.根据权利要求7所述的一种机器人滚边头切换装置,其特征在于:所述操控块(35)外壁均与对应的限位滑块(38)固定连接,所述滑动板(37)外壁均与对应的l型弹性板(43)外壁贴合。
技术总结
本技术公开了一种机器人滚边头切换装置,包括滚边头本体、以及安装在滚边头本体左侧的滚轮,所述滚边头本体右壁安装有限位组件,所述限位组件右侧安装有切换组件,所述切换组件右壁通过六轴法兰盘与机器人固定连接,本技术涉及滚边头切换技术领域;该机器人滚边头切换装置,通过拉动放置块带动连杆和限位块活动,限位块挤压三角挡块,三角挡块同时带动L型弹性板活动,限位块脱离与三角挡块的接触,使得当切换滚边头本体的时候,不需要使用专用工具就能够快速的完成拆卸切换的工作,整个的操作简单快捷省时省力,整个的装置的实用性得到提升。
技术研发人员:卢安琪
受保护的技术使用者:湖北豪迪智能装备有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!