上触点臂铆接机的制作方法
本技术涉及喇叭零部件加工设备领域,特别涉及了一种上触点臂铆接机。
背景技术:
1、当汽车鸣笛时,首先利用自身的机械结构将直流电变成脉冲电,然后通过电磁铁驱动膜片振动系统发出声音,此处机械结构包括上、下触点臂结构,上、下触点臂结构包括上、下触点臂和铆接在上、下触点臂上的触点。
2、目前将触点铆接在上、下触点臂上一般采用半自动机械设备对其进行铆接,采用此种设备会需要人工手动辅助上料和卸料,所以会导致加工自动化程度低从而导致加工效率较慢。
3、本申请所要解决的技术问题为:设计一款全自动从而提高铆接加工效率的上触点臂铆接机。
技术实现思路
1、为了克服现有技术的不足,本实用新型的目的在于提供一种全自动从而提高铆接加工效率的上触点臂铆接机。
2、本实用新型所采用的技术方案为:包括机架,机架设有与之固定连接的第一安装板,第一安装板上设有用于震动将上触点臂供料的第一供料盘,第一供料盘出口端设有一端与之固定连接用于输送上触点臂的第一直震导轨,第一直震导轨另一端对应设有错分机构,错分机构包括用于将上触点臂定位的定位针、与定位针固定连接的第一滑动块以及驱动第一滑动块带动上触点臂进行错分的第一驱动气缸,机架上设有与之固定安装的上下料机构以及加工工位,上下料机构包括上料夹手和下料夹手,加工工位上方对应设有与机架固定安装的旋铆机,机架还设有与之固定安装用于将震动将触点供料的第二供料盘,第二供料盘出口端设有一端与之固定连接用于输送触点的第二直震导轨,第二直震导轨另一端设有与之连通的送料轨道,送料轨道内设有与之限位滑动用于推送触点进行上料铆接的推杆,送料轨道出料端与加工工位对应设置。
3、在一些实施方式中,第一供料盘和第二供料盘内部均呈螺旋形,第一供料盘底部设有与之固定连接的第一震动盘,第二供料盘底部设有与之固定连接的第二震动盘。
4、在一些实施方式中,第一直震导轨下方设有与之固定连接用于驱动其震动的第一震动器。
5、在一些实施方式中,错分机构还包括与机架固定安装的第二安装板,第二安装板设有与之固定连接的第一滑轨,第一滑动块与第一滑轨限位滑动配合,第一驱动气缸驱动端与第一滑动块固定连接。
6、在一些实施方式中,第一滑动块设有与之固定安装的第二驱动气缸,第二驱动气缸驱动端与定位针底端固定连接,第一滑动块对应第一直震导轨出料端还设有与之固定连接用于承载上触点臂进行错分的承载块,第一滑动块上端设有与之固定安装用于感应上触点臂是否输送到承载块的第一感应针,第一感应针与第二驱动气缸通信连接,第二驱动气缸与第一驱动气缸通信连接。
7、在一些实施方式中,上下料机构包括与机架固定安装的第二滑轨,第二滑轨设有与之限位滑动的第二滑动块,第二滑动块设有与之固定连接用于驱动其滑动的第三驱动气缸,第二滑动块设有与之固定安装的升降气缸,升降气缸驱动端设有与之固定连接用于驱动其升降的固定座,固定座上设有与之固定安装的第三滑轨,第三滑轨设有与之限位滑动配合的滑动座,滑动座与上料夹手和下料夹手固定连接,滑动座上设有与之固定安装的第四驱动气缸,第四驱动气缸驱动端与固定座固定连接。
8、在一些实施方式中,加工工位包括与机架固定安装的承托座,承托座上设有与之限位安装的承托柱,承托柱下端设有与之固定连接用于加工时使上触点臂与触点紧贴的弹簧,承托座上设有与之固定连接用于放置触点的加工座,加工座上端呈半圆环形。
9、在一些实施方式中,送料轨道对应第二直震导轨出料端设有第二感应针,推杆一端设有与之传动连接的第五驱动气缸。
10、在一些实施方式中,,第二直震导轨下方设有与之固定连接用于驱动其震动送料的第二震动器。
11、在一些实施方式中,机架对应下料夹手还设有与之固定安装的下料斗。
12、本实用新型的有益效果在于:
13、该上触点臂铆接机通过利用第一供料盘和第一直震导轨对预铆接加工的上触点臂进行供料,利用第二供料盘和第二直震导轨对触点进行供料,再利用错分机构配合上料夹手将预铆接的上触点臂进行上料和利用推杆将触点进行上料至加工工位上,从而能够实现自动上料,进而能够提高加工效率和降低人工成本,当触点和上触点臂均上料至加工工位上时,此时利用旋铆机对二者进行自动铆接,最后再由上料夹手和下料夹手同步进行上料和下料,实现整个加工过程的自动化,从而提高整体的加工效率。
技术特征:
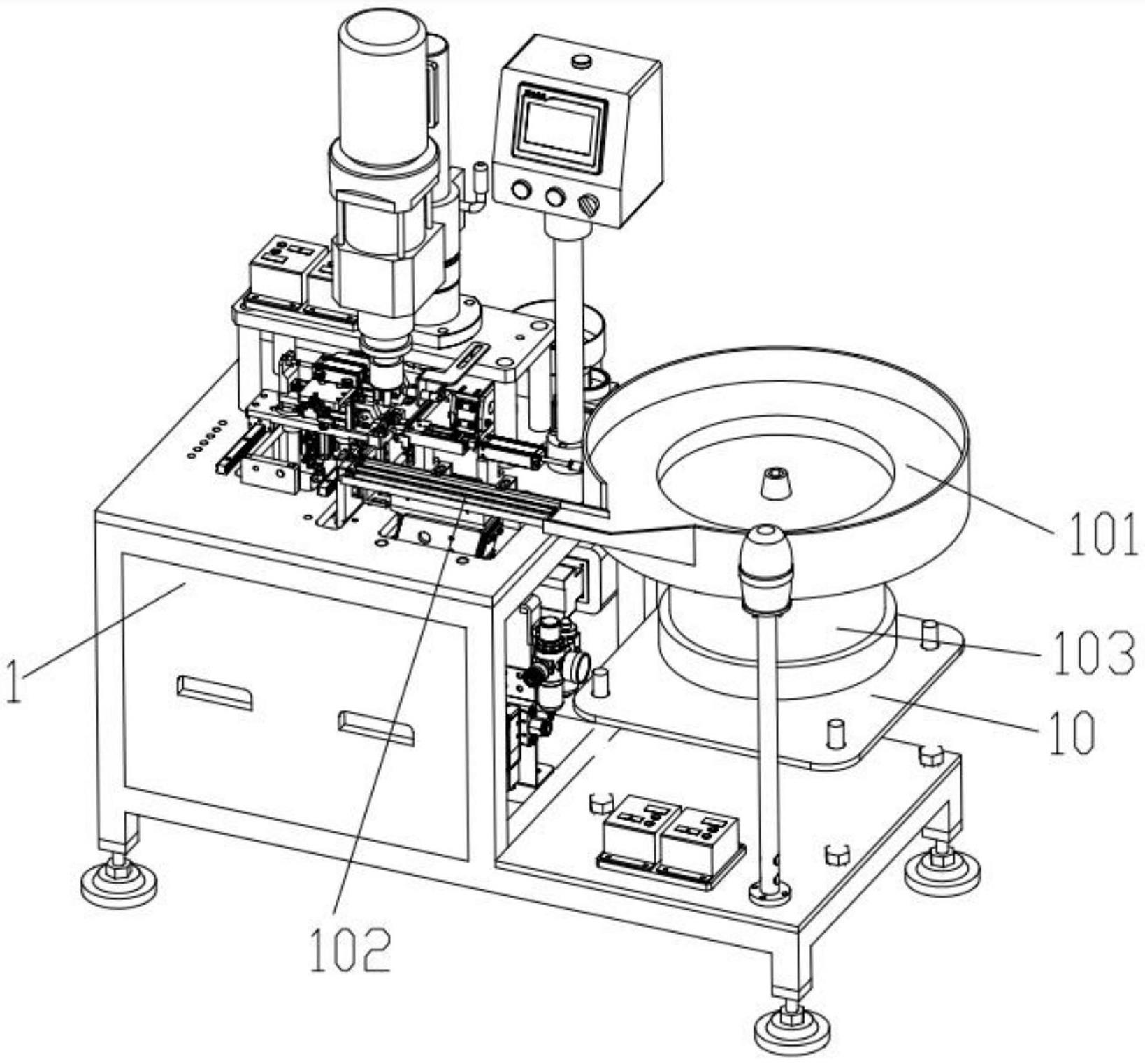
1.上触点臂铆接机,包括机架(1),所述机架(1)设有与之固定连接的第一安装板(10),其特征在于,所述第一安装板(10)上设有用于震动将上触点臂(0)供料的第一供料盘(101),所述第一供料盘(101)出口端设有一端与之固定连接用于输送上触点臂(0)的第一直震导轨(102),所述第一直震导轨(102)另一端对应设有错分机构(2),所述错分机构(2)包括用于将上触点臂(0)定位的定位针(20)、与定位针(20)固定连接的第一滑动块(21)以及驱动第一滑动块(21)带动上触点臂(0)进行错分的第一驱动气缸(22),所述机架(1)上设有与之固定安装的上下料机构(11)以及加工工位(12),所述上下料机构(11)包括上料夹手(110)和下料夹手(111),所述加工工位(12)上方对应设有与机架(1)固定安装的旋铆机(13),所述机架(1)还设有与之固定安装用于将震动将触点(01)供料的第二供料盘(14),所述第二供料盘(14)出口端设有一端与之固定连接用于输送触点(01)的第二直震导轨(140),所述第二直震导轨(140)另一端设有与之连通的送料轨道(141),所述送料轨道(141)内设有与之限位滑动用于推送触点(01)进行上料铆接的推杆(142),所述送料轨道(141)出料端与加工工位(12)对应设置。
2.根据权利要求1所述的上触点臂铆接机,其特征在于,所述第一供料盘(101)和第二供料盘(14)内部均呈螺旋形,所述第一供料盘(101)底部设有与之固定连接的第一震动盘(103),所述第二供料盘(14)底部设有与之固定连接的第二震动盘(143)。
3.根据权利要求1所述的上触点臂铆接机,其特征在于,所述第一直震导轨(102)下方设有与之固定连接用于驱动其震动的第一震动器(104)。
4.根据权利要求1所述的上触点臂铆接机,其特征在于,所述错分机构(2)还包括与机架(1)固定安装的第二安装板(23),所述第二安装板(23)设有与之固定连接的第一滑轨(24),所述第一滑动块(21)与第一滑轨(24)限位滑动配合,所述第一驱动气缸(22)驱动端与第一滑动块(21)固定连接。
5.根据权利要求4所述的上触点臂铆接机,其特征在于,所述第一滑动块(21)设有与之固定安装的第二驱动气缸(25),所述第二驱动气缸(25)驱动端与定位针(20)底端固定连接,所述第一滑动块(21)对应第一直震导轨(102)出料端还设有与之固定连接用于承载上触点臂(0)进行错分的承载块(26),所述第一滑动块(21)上端设有与之固定安装用于感应上触点臂(0)是否输送到承载块(26)的第一感应针(27),所述第一感应针(27)与第二驱动气缸(25)通信连接,所述第二驱动气缸(25)与第一驱动气缸(22)通信连接。
6.根据权利要求1所述的上触点臂铆接机,其特征在于,所述上下料机构(11)包括与机架(1)固定安装的第二滑轨(113),所述第二滑轨(113)设有与之限位滑动的第二滑动块(114),所述第二滑动块(114)设有与之固定连接用于驱动其滑动的第三驱动气缸(115),所述第二滑动块(114)设有与之固定安装的升降气缸(116),所述升降气缸(116)驱动端设有与之固定连接用于驱动其升降的固定座(117),所述固定座(117)上设有与之固定安装的第三滑轨(118),所述第三滑轨(118)设有与之限位滑动配合的滑动座(119),所述滑动座(119)与上料夹手(110)和下料夹手(111)固定连接,所述滑动座(119)上设有与之固定安装的第四驱动气缸(120),所述第四驱动气缸(120)驱动端与固定座(117)固定连接。
7.根据权利要求1所述的上触点臂铆接机,其特征在于,所述加工工位(12)包括与机架(1)固定安装的承托座(121),所述承托座(121)上设有与之限位安装的承托柱(122),所述承托柱(122)下端设有与之固定连接用于加工时使上触点臂(0)与触点(01)紧贴的弹簧,所述承托座(121)上设有与之固定连接用于放置触点(01)的加工座(123),所述加工座(123)上端呈半圆环形。
8.根据权利要求1所述的上触点臂铆接机,其特征在于,所述送料轨道(141)对应第二直震导轨(140)出料端设有第二感应针(144),所述推杆(142)一端设有与之传动连接的第五驱动气缸(145)。
9.根据权利要求1所述的上触点臂铆接机,其特征在于,所述第二直震导轨(140)下方设有与之固定连接用于驱动其震动送料的第二震动器(146)。
10.根据权利要求1所述的上触点臂铆接机,其特征在于,所述机架(1)对应下料夹手(111)还设有与之固定安装的下料斗(147)。
技术总结
本技术涉及喇叭零部件加工设备领域,具体公开了一种上触点臂铆接机,该上触点臂铆接机通过利用第一供料盘和第一直震导轨对预铆接加工的上触点臂进行供料,利用第二供料盘和第二直震导轨对触点进行供料,再利用错分机构配合上料夹手将预铆接的上触点臂进行上料和利用推杆将触点进行上料至加工工位上,从而能够实现自动上料,进而能够提高加工效率和降低人工成本,当触点和上触点臂均上料至加工工位上时,此时利用旋铆机对二者进行自动铆接,最后再由上料夹手和下料夹手同步进行上料和下料,实现整个加工过程的自动化,从而提高整体的加工效率。
技术研发人员:何万汉,黄巧玲
受保护的技术使用者:佛山市创瀛智能自动化设备有限责任公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!