一种真空桶内智能更换叶片装置
本发明属于零件组装的机械臂机构领域,具体涉及一种真空桶内智能更换叶片装置。
背景技术:
1、火星探测因其巨大的前景价值成为近年来深空探测的热点,火星共轴双旋翼飞行器凭借能耗小、垂直起降等优点且能够适应低密度、低雷诺数、高桨尖马赫数的火星环境,成为极佳的火星探测方式。
2、以自行研制的火星共轴双旋翼测试装置为基础,该装置在微型真空桶内模拟火星环境,测试共轴双旋翼工作在火星环境下的各项性能。但在实际操作过程中,桨叶的每次更换都需要先将真空桶内的环境调节至安全区间,再进行人为的拆卸安装,费时费力,同时在各种因素的作用下,难以将真空桶内的环境恢复至原来的实验状态,使实验结果的准确性降低,误差增大。另外在人为更换叶片时,不管是选择什么样的拧紧工具,都不能保证两个叶片的拧紧程度相同。
3、随着现代自动化程度的不断提高,机械手的应用变得越来越广泛。机械手是一种能模仿人手和臂某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。多关节多自由度的机械手,动作灵活,运动惯性小,通用性强,定位精度高,能够抓取靠近机架的工件。基于以上原因,迫切需要一种真空桶内智能更换叶片装置。
技术实现思路
1、本发明提供了一种真空桶内智能更换叶片的装置,解决了在微型真空桶内进行共轴双旋翼测试时叶片更换繁琐复杂的问题。
2、为达到以上目的,本发明采用以下技术方案:
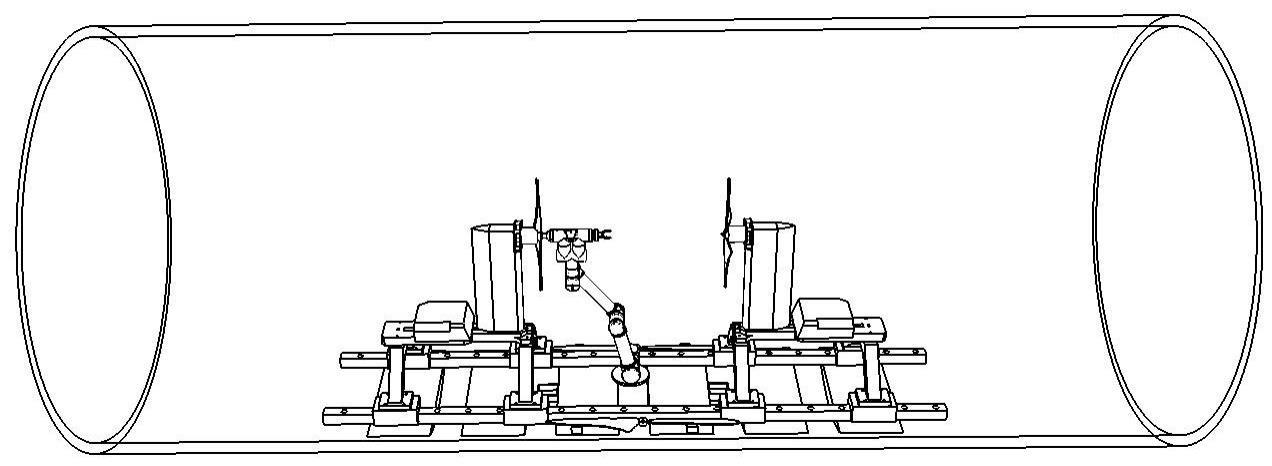
3、一种真空桶内智能更换叶片的装置,包括工作平台、机架、拧螺丝机械手;所述工作平台安装于真空桶的底部,所述拧螺丝机械手和机架安装在工作平台上,所述拧螺丝机械手位于两个相同且对称安装的机架之间,待更换的桨叶放置在水平工作平台上,放置位置位于机架的两侧。
4、以上所述结构中,所述工作平台为真空桶底部弧形区域和垫块组成的水平区域;
5、所述机架包括导轨、梯形支架和测力平台;所述导轨有两根,平行安装在工作平台上,所述梯形支架底端两脚分别固定安装在两根导轨上,所述测力平台固定安装在梯形支架顶部;所述梯形支架有四个,平行安装于导轨上;每个测力平台安装于两个梯形支架上,所述测力平台对称安装;
6、所述拧螺丝机械手包括机械臂和桨叶拆卸机;所述机械臂包括底盘、旋臂,所述旋臂有六个,分别为旋臂i、旋臂ii、旋臂iii、旋臂iv、旋臂v和旋臂vi,旋臂i通过法兰安装在底盘上,旋臂ii、旋臂iii、旋臂iv、旋臂v和旋臂vi也依次通过法兰连接,实现了机械臂的高自由度;
7、所述桨叶拆卸机安装在旋臂vi上;通过法兰与所述旋臂vi活动连接,所述桨叶拆卸机有两端,分为松紧螺丝端和触手端;所述松紧螺丝端可根据所安装的螺钉的不同选择不同的钻头;所述触手端由两个灵活性高、夹紧力强的触手组成,用于取拿叶片。
8、有益效果:本发明提供了一种真空桶内智能更换叶片的装置,所述的真空桶内智能更换叶片装置更换叶片时无需像手动更换技术那样花费较多的作业时间,且更换后需要反复地对真空桶内的环境进行调节,减少了加压卸压的次数,因而可以大大节省叶片更换的成本,提高更换叶片的工作效率。
9、本发明所述的真空桶内智能更换叶片装置在不更换叶片时将拧螺丝机械手放置于梯形支架下部,节省了真空桶内的空间,在相邻垫块缝隙之间、两个叶片的正下方各安装了一个小盒子,用来盛装意外掉落的螺丝。本发明所述的真空桶内智能更换叶片装置实现了在不改变实验条件的前提下进行叶片的更换,可以保证实验结果的准确性,在一定程度上减少了实验误差。
技术特征:
1.一种真空桶内智能更换叶片的装置,其特征在于,包括工作平台、机架、拧螺丝机械手;所述工作平台安装于真空桶的底部,所述拧螺丝机械手和机架安装在工作平台上,所述拧螺丝机械手位于两个相同且对称安装的机架之间,待更换的桨叶放置在水平工作平台上,放置位置位于机架的两侧。
2.根据权利要求1所述的真空桶内智能更换叶片的装置,其特征在于,所述工作平台为真空桶底部弧形区域和位于所述弧形区域的多个平行安装的垫块组成的水平区域。
3.根据权利要求1所述的真空桶内智能更换叶片的装置,其特征在于,所述机架包括导轨、梯形支架和测力平台;所述导轨有两根,平行安装在工作平台上,所述梯形支架底端两脚分别固定安装在两根导轨上,所述测力平台固定安装在梯形支架顶部。
4.根据权利要求3所述的真空桶内智能更换叶片的装置,其特征在于,所述梯形支架有四个,平行安装于导轨上;每个测力平台安装于两个梯形支架上,所述测力平台对称安装。
5.根据权利要求1所述的真空桶内智能更换叶片的装置,其特征在于,所述拧螺丝机械手包括机械臂和桨叶拆卸机;所述桨叶拆卸机安装于机械臂的一端,通过机械臂的带动实现叶片的更换。
6.根据权利要求5所述的真空桶内智能更换叶片的装置,其特征在于,所述机械臂包括底盘、旋臂;所述旋臂有六个,分别为旋臂i、旋臂ii、旋臂iii、旋臂iv、旋臂v和旋臂vi,旋臂i安装在底盘上,旋臂i能够水平转动,旋臂ii、旋臂iii、旋臂iv、旋臂v和旋臂vi依次活动连接。
7.根据权利要求6所述的真空桶内智能更换叶片的装置,其特征在于,所述桨叶拆卸机安装在旋臂vi上,通过法兰与所述旋臂vi活动连接。
8.根据权利要求5或7所述的真空桶内智能更换叶片的装置,其特征在于,所述桨叶拆卸机有两端,分别为松紧螺丝端和触手端;所述桨叶拆卸机可水平转动交换松紧螺丝端和触手端以实现叶片的更换。
9.根据权利要求8所述的真空桶内智能更换叶片的装置,其特征在于,所述松紧螺丝端根据所安装的螺钉的不同选择不同的钻头。
10.根据权利要求8所述的真空桶内智能更换叶片的装置,其特征在于,所述触手端由两个触手组成,用于取拿叶片。
技术总结
本发明公开了一种真空桶内智能更换叶片装置,属于零件组装的机械臂机构领域,解决了在微型真空桶内进行共轴双旋翼测试时叶片更换繁琐复杂的问题。本发明所述装置包括工作平台、机架、拧螺丝机械手,工作平台为真空桶底部弧形区域和六个垫块组成的水平区域,用来固定安装拧螺丝机械手和放置待更换的叶片;机架由导轨、梯形支架、测力平台组成。拧螺丝机械手由机械臂和桨叶拆卸机组成,在机械臂的带动下,桨叶拆卸机可以在空间中灵活运动,满足不同方位的螺丝安装和拆卸。
技术研发人员:陈肇麟,唐智礼,邹园,吴迅,李永胜,刘浩,李佳炫
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!