一种保持架焊接装置的制作方法
本发明涉及自动焊接,具体为一种保持架焊接装置。
背景技术:
1、保持架,即轴承保持架,又称轴承保持器,指部分地包裹全部或部分滚动体,并随之运动的轴承零件,用以隔离滚动体,通常还引导滚动体并将其保持在轴承内。
2、轴承保持架属于机械加工,在加工的时候,需要进行焊接,才能够保持轴承保持架的完整性,目前客户操作方法为手动保持架焊接工作。此操作方法:第一,速度慢影响生产效率;第二,长时间工作容易疲劳,出现未焊透、裂纹、有气孔等焊接质量不合格情况;第三,焊接过程中产生的气体、微小颗粒、强光、以及电磁辐射对工人身体健康有影响;第四,各个工位都需要人工参与,工作量大,人工成本高。基于此,我们提出一种保持架焊接装置。
技术实现思路
1、针对现有技术的不足,本发明提供一种保持架焊接装置,用于解决上述背景技术所提出的问题。
2、本发明的保持架焊接装置,包括用于轴承保持架的工作平台、设置在工作平台上的防护网组件以及弯圆机和校正工位;
3、所述防护网组件的内侧设置有除尘装置、搬运装置以及打磨组件和焊接机器人,所述除尘装置为吸附除尘;
4、所述防护网组件的一侧还设置有轨道组件,用于对目标工件进行运输,所述防护网组件的正面设置有总控制柜和辅助控制柜,用于控制各部件联合协作。
5、作为本发明的进一步改进,所述轨道组件设置的在工作平台的上方,且远离防护网组件的一端设置有弯圆机,所述弯圆机的一侧设置有校正工位,用于对目标工件进行处理。
6、作为本发明的进一步改进,所述校正工位的一侧设置有闭口焊接改造装置,所述闭口焊接改造装置的一侧与焊接机器人相适配。
7、作为本发明的进一步改进,所述闭口焊接改造装置包括用于承载目标工件的承载圆盘,所述承载圆盘的一侧设置有可对目标工件夹持的封闭夹持口。
8、作为本发明的进一步改进,所述搬运装置包括搬运机器人本体和用于目标工件搬运放置的上料平台,所述搬运机器人本体设置在上料平台的一侧。
9、作为本发明的进一步改进,所述上料平台上设置有可供目标工件限制的一个或多个通道,且位于该通道内侧通过丝杆连接有压板。
10、作为本发明的进一步改进,所述搬运机器人本体的活动头部设置有可对目标工件吸附的电磁铁,所述电磁铁呈可拆卸连接。
11、作为本发明的进一步改进,所述打磨组件包括打磨目标工件的输送平台,所述输送平台与轨道组件相连接,所述输送平台的一侧设置有气缸加紧部件,所述气缸夹紧部件的一侧设置有两个驱动部件,所述驱动部件的输出轴一端连接有打磨圆盘,两个所述打磨圆盘之间保持有间距,可供目标工件通过。
12、作为本发明的进一步改进,所述打磨组件的一侧设置有引弧板切割组件,所述引弧板切割组件包括夹爪和弹夹。
13、作为本发明的进一步改进,所述轨道组件包括用于支撑目标工件移动的限位轨道,且所述限位轨道延伸至防护网组件的内侧,所述限位轨道的下方设置有齿轮齿条,且通过动力部件进行驱动。
14、与现有技术相比,本发明的有益效果如下:
15、本发明通过采用立焊焊接工艺方式,对焊接参数、工艺要求更高;焊接过程机器人全自动焊接,且在焊接的时候,运用3d相机寻焊缝,检测焊缝宽度,产品高度,焊接处平面度,同时在焊接的时候,钢带的定位压紧较为方便,钢带的自动流转为流水线式进行,焊缝的自动定位通过机械手段确定,能够极大的提高保持架的焊接效果,减少焊接出现的质量问题,同时提高焊接的效果;而在焊接的时候,采用了自动上引弧板,通过引弧板能够线上自动切割,且在焊接之后,利用轨道组件,焊缝能够线上自动打磨,让保持架的焊接方式相较于传统的手工打磨,可以减少人力,节约成本,效率得以极大提高。
技术特征:
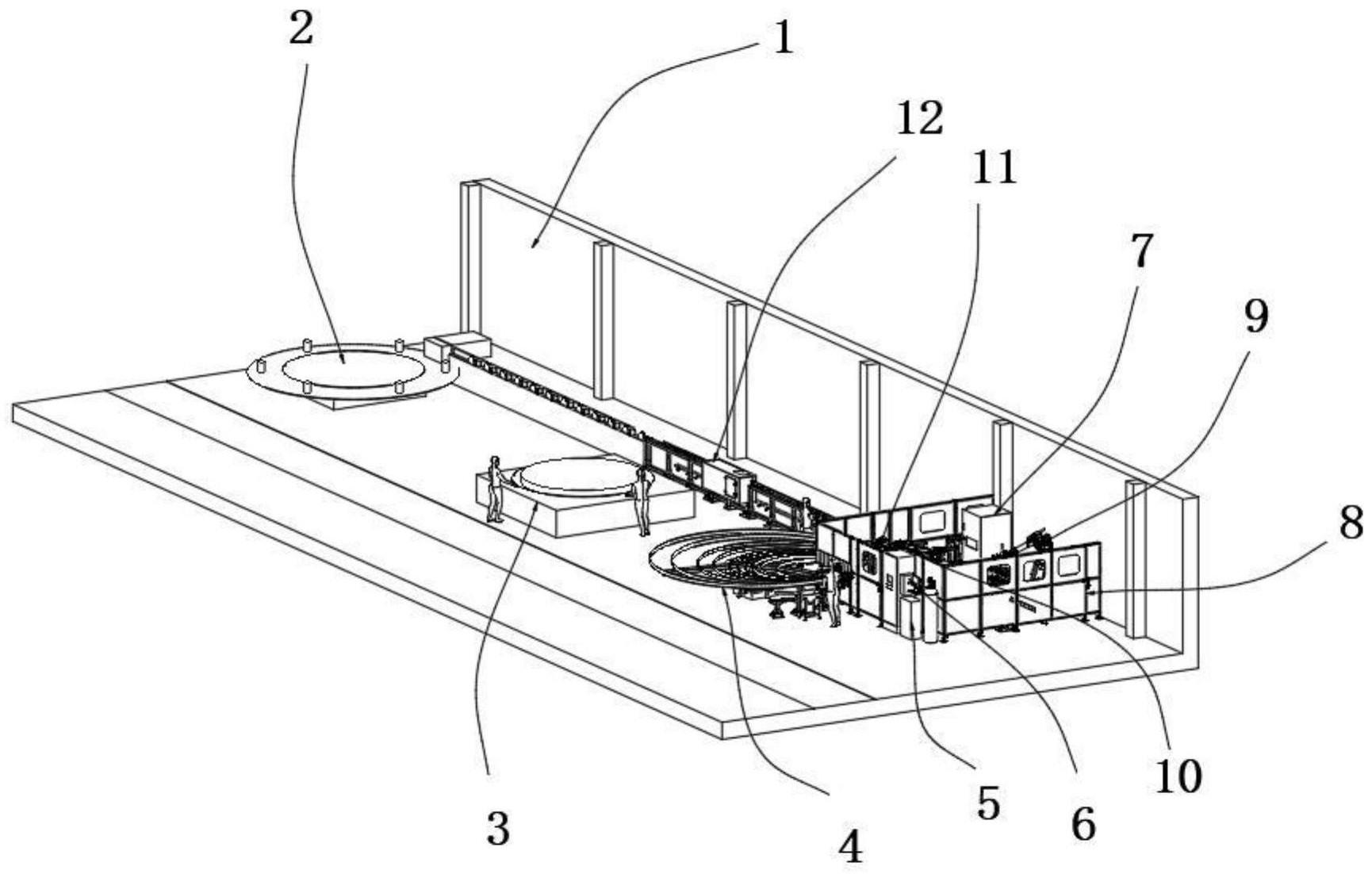
1.一种保持架焊接装置,包括用于轴承保持架的工作平台(1)、设置在工作平台(1)上的防护网组件(8)以及弯圆机(2)和校正工位(3);
2.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述轨道组件(12)设置的在工作平台(1)的上方,且远离防护网组件(8)的一端设置有弯圆机(2),所述弯圆机(2)的一侧设置有校正工位(3),用于对目标工件进行处理。
3.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述校正工位(3)的一侧设置有闭口焊接改造装置(4),所述闭口焊接改造装置(4)的一侧与焊接机器人(11)相适配。
4.根据权利要求3所述的一种保持架焊接装置,其特征在于:所述闭口焊接改造装置(4)包括用于承载目标工件的承载圆盘(42),所述承载圆盘(42)的一侧设置有可对目标工件夹持的封闭夹持口(41)。
5.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述搬运装置(9)包括搬运机器人本体(91)和用于目标工件搬运放置的上料平台(94),所述搬运机器人本体(91)设置在上料平台(94)的一侧。
6.根据权利要求5所述的一种保持架焊接装置,其特征在于:所述上料平台(94)上设置有可供目标工件限制的一个或多个通道,且位于该通道内侧通过丝杆(92)连接有压板(93)。
7.根据权利要求5所述的一种保持架焊接装置,其特征在于:所述搬运机器人本体(91)的活动头部设置有可对目标工件吸附的电磁铁,所述电磁铁呈可拆卸连接。
8.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述打磨组件(10)包括打磨目标工件的输送平台(101),所述输送平台(101)与轨道组件(12)相连接,所述输送平台(101)的一侧设置有气缸夹紧部件(102),所述气缸夹紧部件(102)的一侧设置有两个驱动部件(103),所述驱动部件(103)的输出轴一端连接有打磨圆盘(104),两个所述打磨圆盘(104)之间保持有间距,可供目标工件通过。
9.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述打磨组件(10)的一侧设置有引弧板切割组件(13),所述引弧板切割组件(13)包括夹爪(131)和弹夹(132)。
10.根据权利要求1所述的一种保持架焊接装置,其特征在于:所述轨道组件(12)包括用于支撑目标工件移动的限位轨道(121),且所述限位轨道(121)延伸至防护网组件(8)的内侧,所述限位轨道(121)的下方设置有齿轮齿条(122),且通过动力部件进行驱动。
技术总结
本发明涉及自动焊接技术领域,具体公开了保持架焊接装置,包括用于轴承保持架的工作平台、设置在工作平台上的防护网组件以及弯圆机和校正工位;所述防护网组件的内侧设置有除尘装置、搬运装置以及打磨组件和焊接机器人,所述除尘装置为吸附除尘;本发明通过采用立焊焊接工艺方式,对焊接参数、工艺要求更高;焊接过程机器人全自动焊接,且在焊接的时候,运用3D相机寻焊缝,检测焊缝宽度,产品高度,焊接处平面度,同时在焊接的时候,钢带的定位压紧较为方便,钢带的自动流转为流水线式进行,焊缝的自动定位通过机械手段确定,能够极大的提高保持架的焊接效果。
技术研发人员:王燕平,徐建涛,雷志辉
受保护的技术使用者:津上智造智能科技江苏有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!