一种基于计算机视觉的智能弧焊工作站的制作方法
本发明涉及焊接领域,尤其涉及一种基于计算机视觉的智能弧焊工作站。
背景技术:
1、弧焊工作站主要是用来采用自动化焊接的方式来对产品进行焊接,与人工焊接的方式相比,使用弧焊工作站对产品进行焊接,不仅焊接结果一致性高,而且还能有更高的焊接效率。现有技术中,弧焊工作站上的焊接机器人一般采用的是激光跟踪的方式来进行焊缝的跟踪,即在焊缝上投出激光,然后获取包含激光的图像,对图像进行识别从而获取焊缝的位置,以实现焊接机器人对焊缝的跟踪。
2、但是,焊接过程中容易产生弧光、飞溅等各种干扰源,从而导致获得的图像中,激光的周围容易出现过多的干扰源,影响焊缝位置识别的准确性,从而影响弧焊工作站的焊接效果。
技术实现思路
1、本发明的目的在于公开一种基于计算机视觉的智能弧焊工作站,解决如何提高使用激光跟踪的方式来获取焊缝的位置的过程中,提高弧焊工作站的焊接效果的问题。
2、为了达到上述目的,本发明采用如下技术方案:
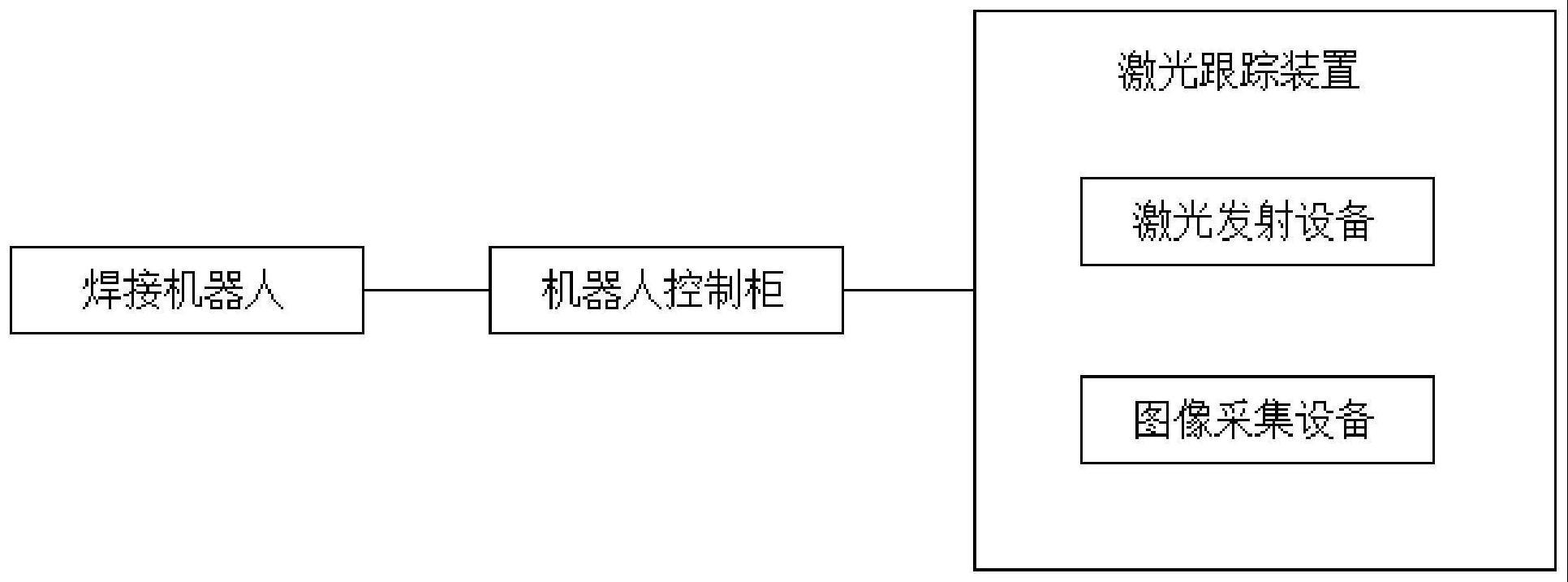
3、一种基于计算机视觉的智能弧焊工作站,包括机器人控制柜、焊接机器人和激光跟踪装置;
4、激光跟踪装置包括激光发射设备和图像采集设备;
5、激光发射设备用于在向焊缝投射激光;
6、图像采集设备用于获取包含激光的跟踪图像集;
7、机器人控制柜用于从跟踪图像集中选出目标图像,对目标图像进行计算,得到焊接机器人的目标位置,并控制焊接机器人移动至目标位置;
8、其中,获取包含激光的跟踪图像集,包括:
9、计算拍摄持续时长;
10、在拍摄持续时长内获取跟踪图像集;
11、其中,从跟踪图像集中选出目标图像,包括:
12、计算跟踪图像集中每个图像的干扰程度系数:
13、
14、indecod为跟踪图像集中的图像d的干扰程度系数,numfal为图像d中的像素点的总数,numbtd为图像d的中包含的满足筛选要求的像素点的数量,λ为计算系数,migr为图像d所对应的灰度图像中的灰度值的最小值,magr为图像d所对应的灰度图像中的灰度值的最大值,nfgrg为图像d所对应的灰度图像中灰度值为g的像素点的总数,bsmsh为设置的大于0的常数;
15、将干扰程度系数最小的图像作为目标图像。
16、优选地,基于计算机视觉的智能弧焊工作站还包括电源设备;
17、电源设备用于为机器人控制柜、焊接机器人和激光跟踪装置进行供电。
18、优选地,基于计算机视觉的智能弧焊工作站还包括焊接工作台;
19、焊接工作台设置在焊接机器人和激光跟踪装置的下方,用于放置待焊接的产品。
20、优选地,基于计算机视觉的智能弧焊工作站还包括支撑装置,支撑装置设置在焊接工作台的一侧,用于将焊接机器人吊装在焊接工作台的上方。
21、优选地,基于计算机视觉的智能弧焊工作站还包括气瓶,气瓶用于存放焊接用气体,气瓶与焊接机器人连接。
22、优选地,计算拍摄持续时长,包括:
23、使用如下函数计算拍摄持续时长:
24、
25、其中,shotimt为时刻t计算得到的拍摄持续时长,btvlu为设置的基础时长,topsp为焊接机器人的最大移动速度,movspt为在时间段t内,焊接机器人的平均移动速度,avelitt为在时间段t内,拍摄到的图像的平均亮度,litma为设定的亮度最大值,dist为焊接机器人在时刻t-s与焊缝之间的偏移量,madst为设定的偏移量最大值,s为正整数参数,α为的权重,β为的权重,δ为的权重,t=[t-s,t]。
26、优选地,在拍摄持续时长内获取跟踪图像集,包括:
27、对拍摄持续时长进行倒计时;
28、在倒计时结束前持续获取包含激光的图像,从而得到跟踪图像集。
29、优选地,对于图像d中的像素点p,若n×(valp-h)≤shrp≤n×(valp+h),则表示像素点d满足筛选要求,n为跟踪图像集中的图像的总数,vali,p为跟踪图像集的第i个图像中与像素点p坐标相同的像素点的灰度值,valp为像素点p的灰度值,h为设定的控制参数。
30、本发明在使用激光跟踪的方式来进行焊缝的跟踪时,通过先获取跟踪图像集,然后将跟踪图像集中的干扰程度系数最小的图像作为用来识别焊缝位置的目标图像,从而能够根据受到干扰源干扰程度最小的图像来计算得到焊接机器人的目标位置,有效地提高了获得的目标位置的准确性,从而提高了弧焊工作站的焊接效果。
技术特征:
1.一种基于计算机视觉的智能弧焊工作站,其特征在于,包括机器人控制柜、焊接机器人和激光跟踪装置;
2.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,还包括电源设备;
3.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,还包括焊接工作台;
4.根据权利要求3所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,还包括支撑装置,支撑装置设置在焊接工作台的一侧,用于将焊接机器人吊装在焊接工作台的上方。
5.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,还包括气瓶,气瓶用于存放焊接用气体,气瓶与焊接机器人连接。
6.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,计算拍摄持续时长,包括:
7.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,在拍摄持续时长内获取跟踪图像集,包括:
8.根据权利要求1所述的一种基于计算机视觉的智能弧焊工作站,其特征在于,对于图像d中的像素点p,若n×(valp-h)≤shrp≤n×(valp+h),则表示像素点d满足筛选要求,n为跟踪图像集中的图像的总数,vali,p为跟踪图像集的第i个图像中与像素点p坐标相同的像素点的灰度值,valp为像素点p的灰度值,h为设定的控制参数。
技术总结
本发明属于焊接领域,公开了一种基于计算机视觉的智能弧焊工作站,包括机器人控制柜、焊接机器人和激光跟踪装置;激光跟踪装置包括激光发射设备和图像采集设备;激光发射设备用于在向焊缝投射激光;图像采集设备用于获取包含激光的跟踪图像集;机器人控制柜用于从跟踪图像集中选出目标图像,对目标图像进行计算,得到焊接机器人的目标位置,并控制焊接机器人移动至目标位置。本发明能够根据受到干扰源干扰程度最小的图像来计算得到焊接机器人的目标位置,有效地提高了获得的目标位置的准确性,从而提高了弧焊工作站的焊接效果。
技术研发人员:王洪义
受保护的技术使用者:浙江奥桑机械设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!