自动化装配线、压紧装配方法及机械手与流程
本发明属于智能制造,尤其涉及一种自动化装配线、压紧装配方法及机械手。
背景技术:
1、汽车零部件的组装过程中,一般会需要使用压紧的步骤,用于一些零部件之间的螺钉固定或者铆钉固定或者过盈挤压等各种组装固定。压紧一般采用压紧机器对放置在工装台上的零部件进行压紧,压紧机器一般有液压压紧、机械压紧等方式。
2、很多零部件都是不规则的形状,尤其是有些零部件的压紧底面都是不规则形状,零部件独立无法平整放置或者零部件配合较麻烦。如果采用将零部件放置于压紧待料位后直接采用压紧机器压紧,容易导致零部件在压紧过程中发生变形,影响后续工序,例如后续如有拧紧,会导致拧紧孔对不准的情况,压紧不合格。
3、针对这种零部件,如果在压紧机器上增加针对零部件的专用夹爪,这样会增加压紧机器的成本。
技术实现思路
1、本发明的目的在于提供一种成本较低且压紧质量好的自动化装配线及机械手。
2、为实现上述目的,采用如下技术方案:
3、一种自动化装配线,包括压紧机,所述自动化装配线包括至少第一工位和第二工位,所述第一工位为压紧工位,所述自动化装配线包括机械手,所述机械手包括夹紧装置,所述机械手至少具有第一工作状态和第二工作状态,在所述第一工作状态,所述夹紧装置位于所述第一工位;在所述第二工作状态,所述夹紧装置位于所述第二工位;
4、所述夹紧装置具有定位板、夹爪和缓冲部件,所述夹爪位于所述定位板的一侧,且所述夹爪和所述定位板固定,所述缓冲部件位于所述定位板的另一侧,且所述缓冲部件和所述定位板固定或限位;所述缓冲部件具有第一位置状态和第二位置状态,在所述第一位置状态,所述缓冲部件沿所述压紧方向的长度为第一长度,在所述第二位置状态,所述缓冲部件沿所述压紧方向的长度为第二长度,所述第一长度小于所述第二长度;
5、所述自动化装配线具有压紧状态和非压紧状态,在所述压紧状态,所述缓冲部件为所述第二位置状态;在所述非压紧状态,所述缓冲部件具有所述第一位置状态。
6、上述技术方案自动化装配线至少具有第一工位和第二工位,机械手具有夹紧装置,在机械手的第一工作状态,夹紧装置位于第一工作状态,在机械手的第二工作状态,夹紧装置位于第二工作状态,如此机械手的夹紧装置能同时用于两个工位,夹紧装置利用率高,成本较低;另外由于第一工位为压紧工位,夹紧装置是用于夹紧待装配的零件用于配合压紧机使用,夹紧装置的缓冲部件具有第一位置状态和第二位置状态,在所述压紧状态,所述缓冲部件为所述第二位置状态;在所述非压紧状态,所述缓冲部件为所述第一位置状态,如此,夹紧装置能够配合压紧机的压紧,压紧质量较好。
7、为实现上述目的,采用如下技术方案:
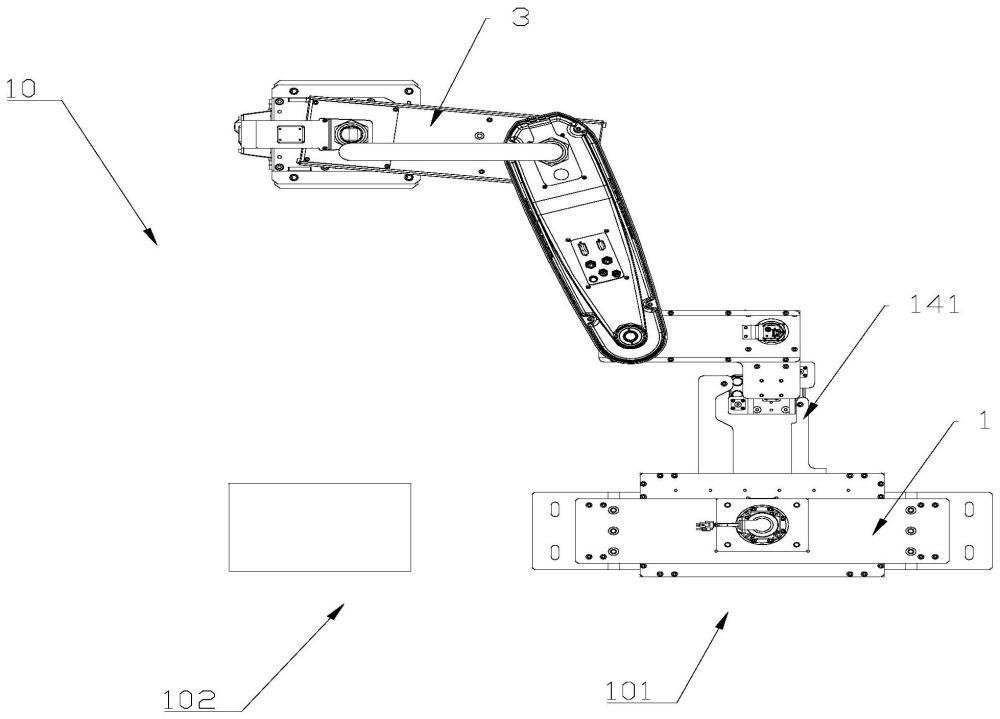
8、一种机械手,所述机械手包括夹紧装置,所述机械手应用于压紧工位,所述夹紧装置具有固定板、定位板、夹爪和缓冲部件,所述夹爪位于所述定位板的一侧,且所述夹爪和所述定位板固定,所述缓冲部件位于所述定位板的另一侧,所述缓冲部件位于所述固定板和所述定位板之间,且所述缓冲部件和所述定位板固定或限位;
9、所述缓冲部件具有第一位置状态和第二位置状态,在所述第一位置状态,所述缓冲部件沿所述压紧方向的长度为第一长度,在所述第二位置状态,所述缓冲部件沿所述压紧方向的长度为第二长度,所述第一长度小于所述第二长度。
10、上述技术方案的机械手的缓冲部件具有第一位置状态和第二位置状态,在所述第一位置状态,所述缓冲部件沿所述压紧方向的长度为第一长度,在所述第二位置状态,所述缓冲部件沿所述压紧方向的长度为第二长度,所述第一长度小于所述第二长度;该机械手能应用于压紧工位,适用性好,能降低装配线成本。
11、本发明还提供一种压紧质量好的压紧装配方法。
12、为实现上述目的,采用如下技术方案:
13、一种压紧装配方法,包括以下步骤:
14、夹紧装置夹紧待压紧零件;
15、夹紧装置将待压紧零件的配合部放置于待压紧配合零件;
16、压紧机对待压紧零件施力;
17、所述压紧机将待压紧零件沿压紧方向推向所述待压紧配合零件,所述夹紧装置的缓冲件由所述待压紧零件的带动而伸长,其中,所述压紧机具有沿压紧方向的作用行程,定义所述压紧机开始对所述待压紧零件施力为作用行程的起始点,所述压紧机完成压紧为作用行程的终止点,所述缓冲件具有沿所述压紧方向的极限行程,所述作用行程的距离不大于所述极限行程的距离。
18、上述技术方案通过压紧机将待压紧零件沿压紧方向推向所述待压紧配合零件,所述夹紧装置的缓冲件由所述待压紧零件的带动行程拉长,且所述压紧机的作用行程的距离不大于所述极限行程的距离,压紧质量好且夹紧装置使用寿命较高。
技术特征:
1.一种自动化装配线,包括压紧机,其特征在于,所述自动化装配线包括至少第一工位和第二工位,所述第一工位为压紧工位,所述自动化装配线包括机械手,所述机械手包括夹紧装置,所述机械手至少具有第一工作状态和第二工作状态,在所述第一工作状态,所述夹紧装置位于所述第一工位;在所述第二工作状态,所述夹紧装置位于所述第二工位;
2.根据权利要求1所述的自动化装配线,其特征在于,在所述第二工位,所述缓冲部件具有所述第一位置状态;所述压紧机具有沿压紧方向的作用行程,定义所述压紧机开始压紧施力为作用行程的起始点,所述压紧机完成压紧为作用行程的终止点,所述缓冲部件具有沿所述压紧方向的极限行程,所述作用行程的距离不大于所述极限行程的距离;
3.根据权利要求1或2所述的自动化装配线,其特征在于,所述夹紧装置具有固定板,所述缓冲部件位于所述固定板和所述定位板之间,所述缓冲部件包括缓冲件,所述缓冲件为弹簧件,所述第二位置状态为所述弹簧件的伸长状态,所述极限行程为所述弹簧件的拉伸极限长度。
4.根据权利要求1或2所述的自动化装配线,其特征在于,所述缓冲部件具有驱动活塞、气缸底座,所述气缸底座和所述固定板固定,所述驱动活塞的末端部和所述定位板固定,所述缓冲部件具有第一密封腔、第二密封腔、第一进气通道和第二进气通道,所述第一进气通道和所述密封腔连通,所述第二进气通道和所述第二密封腔连通,所述第一密封腔和所述第二密封腔位于所述驱动活塞的两侧;
5.根据权利要求4所述的自动化装配线,其特征在于,
6.一种压紧装配方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的压紧装配方法,其特征在于,还包括以下步骤:
8.根据权利要求6所述的压紧装配方法,其特征在于,还包括以下步骤:
9.根据权利要求6或7或8所述的压紧装配方法,其特征在于,还包括以下步骤:
10.一种机械手,所述机械手包括夹紧装置,其特征在于,所述机械手应用于压紧工位,所述夹紧装置具有固定板、定位板、夹爪和缓冲部件,所述夹爪位于所述定位板的一侧,且所述夹爪和所述定位板固定,所述缓冲部件位于所述定位板的另一侧,所述缓冲部件位于所述固定板和所述定位板之间,且所述缓冲部件和所述定位板固定或限位;
技术总结
本发明公开了一种自动化装配线、压紧装配方法及机械手,包括压紧机,压紧机具有滑块,自动化装配线包括至少第一工位和第二工位,第一工位为压紧工位,自动化装配线包括机械手,机械手包括夹紧装置,机械手至少具有第一工作状态和第二工作状态,在第一工作状态,夹紧装置位于第一工位;在第二工作状态,夹紧装置位于第二工位。该自动化装配线、机械手成本较低且压紧质量好。
技术研发人员:请求不公布姓名
受保护的技术使用者:绍兴三花新能源汽车部件有限公司
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!