基于多关节机器人的在线平面度检测平台及检测方法
本发明涉及平面度测量,特别涉及基于多关节机器人的在线平面度检测平台及检测方法。
背景技术:
1、随着智能制造领域的快速兴起,各类精密元件的加工制造也备受瞩目。在nm级的精密元件的加工过程中,竖直的精密表面,比如轴类零件的车加工端面、其它零件的铣削过程中的竖直表面等,往往在加工过程中,就需要间歇性地得到阶段性的检验。而大多数这种nm级的检验无法通过接触传感测量来直接实现,必须使用光学测量技术来实现非接触测量。
2、现在nm级的精密元件表面的非接触检测环节,大多无法实现在线、高精度的现场检测,都是将加工过程中的工件卸下,移送到光学实验室中,进行专门测量。如果未达到加工精度要求,则需要重新上线,继续加工,然后再次检测,周而复始,直到满足精度要求。这种检测方式极大地降低了效率,同时在重复装夹工件过程中,也会带来可靠性弊端,而且在移送过程中易发生破坏性的人为因素故障。
技术实现思路
1、针对以上缺陷,本发明的目的是提供基于多关节机器人的在线平面度检测平台及检测方法,旨在解决现有技术中无法在线检测工件的平面度,工件需要转移和重复装夹,工件易损坏的技术问题。
2、为解决上述技术问题,本发明的技术方案是:
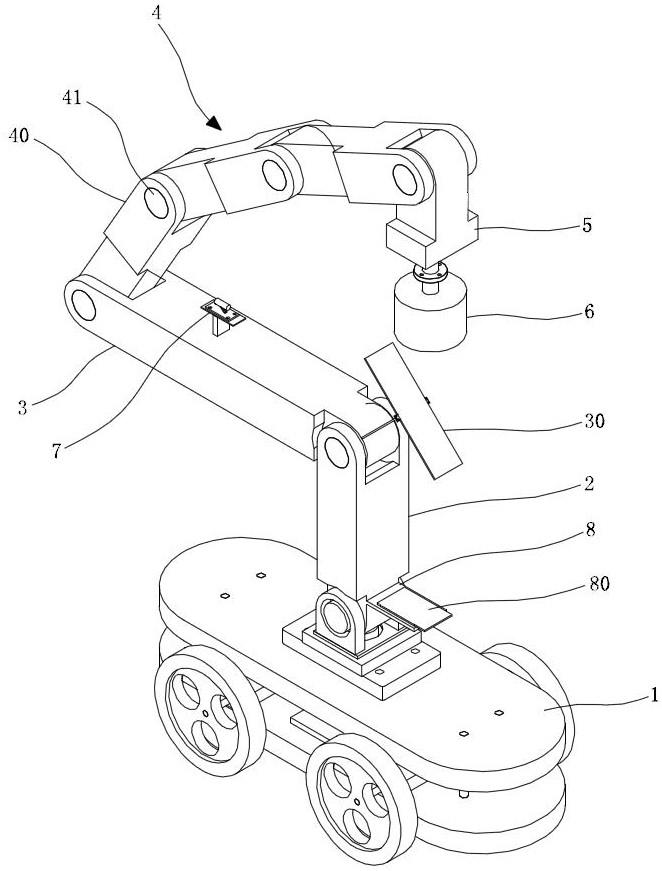
3、基于多关节机器人的在线平面度检测平台,包括自动移动底座、铰接在自动移动底座上的下臂、铰接在下臂的一端的横梁以及铰接在横梁后端的上臂,上臂上铰接有前端垂臂,前端垂臂上设有固态图像传感器系统,横梁上设有激光器,下臂上安装有正对固态图像传感器系统的调频激励器,调频激励器的上端设有参考镜面,横梁的前端安装有位于激光器前方、固态图像传感器系统和参考镜面之间的分束板。
4、优选的,下臂和上臂均包括多个机械臂关节,机械臂关节由驱动机构驱动转动。
5、优选的,调频激励器包括底板、两个分别设置在底板的两个相邻侧的压电元,以及两个分别设置在底板的另两个相邻侧的支撑立柱。
6、优选的,压电元晶体为钙钛矿铁电晶体。
7、优选的,压电元和支撑立柱的顶部均开设有第一半球形滚珠槽,第一半球形滚珠槽内嵌设有滚珠,参考镜面的底部开设有扣合在第一半球形滚珠槽上的第二半球形滚珠槽。
8、优选的,自动移动底座内安装有与驱动机构电控连接的控制系统。
9、优选的,自动移动底座内安装有配重平衡块。
10、在线平面度检测方法,包括以下步骤:
11、步骤一:自动移动底座移动,使关节机器人到达被测工件的加工区域;
12、步骤二:驱动机构驱动机械臂关节的位置调整,使得固态图像传感器系统、分束板和调频激励器位于第一直线上,激光器、分束板和被测精密立体表面位于第二直线上,第一直线和第二直线互相垂直;
13、步骤三:激光器发出的激光照射到分束板上,分成光束ⅰ和光束ⅱ两部分光束;光束ⅰ透过分束板,打到被测精密立体表面上,经过被测精密立体表面反射后,再返回到分束板的左侧面,然后在分束板的左侧面反射,进入到固态图像传感器系统,这称为ⅰ号光束;光束ⅱ在分束板的右侧表面直接反射,打到调频激励器的参考镜面上,再次反射后回到分束板的右侧表面,然后透过分束板,向上进入到固态图像传感器系统,这称为ⅱ号光束;ⅰ号光束与ⅱ号光束发生干涉,会在固态图像传感器系统呈现条纹状图形;
14、步骤四:调节调频激励器,调频激励器频率波动的目标规律是:把频率的变化量等效为被测位相的移相量,大小为45度数值,且初始基准频率的确定,满足每条纹具有3.5—4.5个像素,采用相邻5像素点强度分析方法,计算被测精密立体表面的位相φ和表面粗糙度ra,得到微观立体面形。
15、优选的,步骤四中,相邻5像素点强度分析方法,是指水平或垂直方向的条纹图上相邻五点的光的强度、、、、,满足方程的等式误差值小于等于5%,在此条件下,获得标准条纹图,标准条纹图处理后的微观精密立体面形,即被恢复的位相φ,被测精密立体表面的位相φ用以下公式来计算:
16、;
17、其中,a为近似参数,由下式确定:
18、;
19、其中,e为等式误差值;
20、表面粗糙度ra由下式获得:
21、。
22、优选的,方程的等式误差值超过5%,则需要调整基准频率,直到满足要求。
23、采用了上述技术方案后,本发明的有益效果是:
24、基于成熟的移动机器人技术,将光学干涉测量系统与多关节机器人集成,光学测量系统包括激光器、固态图像传感器系统和激励器,实现了nm级的精密元件表面非接触检测环节的在线化、实时化,提高了加工和检测效率,增加了检测结果的可靠性,缩短了工时,也避免了工件在移送过程中可能发生的破坏性人为因素故障。把核心光学元件设置在机器人的不同的关节部位,避免了机器人移动过程中重心偏移和横向摆动带来的非线性振动。扩展了常规光学干涉测量系统,增加了调频激励器,提高了条纹图处理的速度和精度。调频激励器的双压电元采用钙钛矿铁电晶体,输出位移具有快速响应性、高灵敏度、以及大位移特征。同时钙钛矿铁电晶体本身具有柔性,能抑制在机器人运动过程中产生的颤振,增加了压电元本身和系统的安全可靠性。
25、采用了相邻5像素点强度分析方法,快速实现了单一条纹图的处理,并提高了位相处理的精度。相邻5像素点的强度分析方法,计算简单,同时也便于远程图像处理系统的分析处理,便于数据的实时在线反馈传输,且适合于有线和无线传输,便于远程控制。
技术特征:
1.基于多关节机器人的在线平面度检测平台,其特征在于,包括自动移动底座、铰接在自动移动底座上的下臂、铰接在下臂的一端的横梁以及铰接在横梁后端的上臂,所述上臂上铰接有前端垂臂,所述前端垂臂上设有固态图像传感器系统,所述横梁上设有激光器,所述下臂上安装有正对固态图像传感器系统的调频激励器,调频激励器的上端设有参考镜面,所述横梁的前端安装有位于激光器前方、固态图像传感器系统和参考镜面之间的分束板。
2.如权利要求1所述的基于多关节机器人的在线平面度检测平台,其特征在于,所述下臂和上臂均包括多个依次铰接的机械臂关节,机械臂关节由驱动机构驱动转动。
3.如权利要求2所述的基于多关节机器人的在线平面度检测平台,其特征在于,所述调频激励器包括底板、两个分别设置在底板的两个相邻侧的压电元,以及两个分别设置在底板的另两个相邻侧的支撑立柱。
4.如权利要求3所述的基于多关节机器人的在线平面度检测平台,其特征在于,压电元晶体为钙钛矿铁电晶体。
5.如权利要求3所述的基于多关节机器人的在线平面度检测平台,其特征在于,所述压电元和支撑立柱的顶部均开设有第一半球形滚珠槽,第一半球形滚珠槽内嵌设有滚珠,参考镜面的底部开设有扣合在第一半球形滚珠槽上的第二半球形滚珠槽。
6.如权利要求2所述的基于多关节机器人的在线平面度检测平台,其特征在于,所述自动移动底座内安装有配重平衡块。
7.如权利要求2所述的基于多关节机器人的在线平面度检测平台,其特征在于,所述自动移动底座内安装有与驱动机构电控连接的控制系统。
8.在线平面度检测方法,其特征在于,使用如权利要求2至7中任一项所述的基于多关节机器人的在线平面度检测平台,包括以下步骤:
9.如权利要求8所述的在线平面度检测方法,其特征在于,步骤四中,所述相邻5像素点强度分析方法,是指水平或垂直方向的条纹图上相邻五点的光的强度、、、、,满足方程的等式误差值小于等于5%,在此条件下,获得标准条纹图,标准条纹图处理后的微观精密立体面形,即被恢复的位相φ,被测精密立体表面的位相φ用以下公式来计算:
10.如权利要求9所述的在线平面度检测方法,其特征在于,方程的等式误差值超过5%,则需要调整基准频率,直到满足要求。
技术总结
本发明公开了基于多关节机器人的在线平面度检测平台及检测方法,涉及平面度测量技术领域,包括自动移动底座、铰接在自动移动底座上的下臂、铰接在下臂的一端的横梁以及铰接在横梁后端的上臂,上臂上铰接有前端垂臂,前端垂臂上设有固态图像传感器系统,横梁上设有激光器,下臂上安装有正对固态图像传感器系统的调频激励器,调频激励器的上端设有参考镜面,横梁的前端安装有位于激光器前方、固态图像传感器系统和参考镜面之间的分束板。本发明将光学干涉测量系统与多关节机器人集成,实现了精密元件表面非接触检测环节的在线化、实时化,提高加工和检测效率,增加检测结果的可靠性,避免工件在移送过程中发生故障。
技术研发人员:刘廷瑞,丁妍,赵康,巩爱凌
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!