全自动太阳能硅片激光加工系统及其控制方法与流程
本发明涉及到智能设备领域,具体而言,涉及到一种全自动太阳能硅片激光加工系统及其控制方法。
背景技术:
1、激光具有单色性好、能量密度高、空间控制性和时间控制性良好等一系列优点,目前它已广泛应用于材料加工等领域。激光加工的行业包括汽车制造、航天航空、电子、化工、包装、医疗设备等,与计算机数控技术相结合,激光加工技术已成为工业生产自动化的关键技术,为优质、高效和低成本的加工生产开辟了广阔的前景。
2、但现有的激光加工设备不够智能化,现有的激光加工设备一般都是等上一批产品加工完成后下料,下一批的产品才刚开始进行上料,导致效率较慢,成本提高,而且加工周期比较长,在批量生产过程中没有明显的优势,不利于批量生产,且现有的激光加工设备都是在上料时就开始对产品定位调整,而调整完成后运送去加工的途中很容易造成产品歪斜,导致加工后的产品不精确,且浪费成本。
技术实现思路
1、本发明的主要目的为提供一种全自动太阳能硅片激光加工系统及其控制方法,旨在解决上述背景技术中存在的技术问题。
2、本发明公开了以下技术方案:
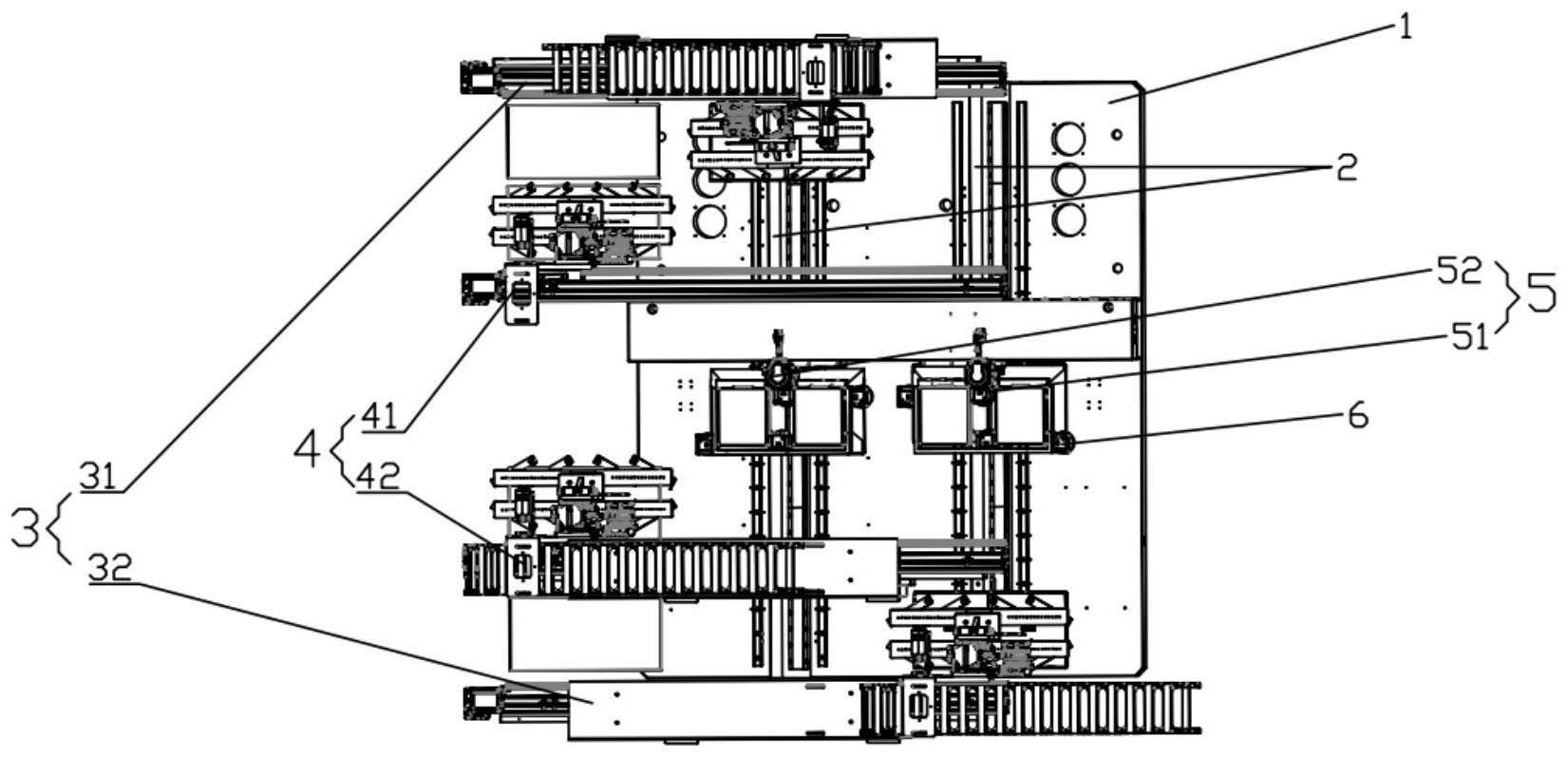
3、一种全自动太阳能硅片激光加工系统,包括:
4、基座;
5、双动子直线电机,设置于所述基座上;
6、下料轴组,包括第一下料轴和第二下料轴,分别设置于所述基座两端;
7、上料轴组,包括第一上料轴和第二上料轴,间隔设置于所述第一下料轴和所述第二下料轴之间;
8、加工模块,通过支架与所述基座连接,设置于所述第一上料轴和所述第二上料轴之间,所述加工模块包括激光轴和工业定位相机,所述激光轴和所述工业定位相机连接,以使所述激光轴加工产品时对产品进行定位调整;
9、治具结构组,所述治具结构组包括第一治具平台、第二治具平台、第三治具平台、第四治具平台;
10、其中,所述第一治具平台和所述第四治具平台通过所述双动子直线电机移动到所述加工模块进行加工时,所述第二治具平台和所述第三治具平台通过所述上料轴组上料;当加工完成后,所述第一治具平台通过所述双动子直线电机沿着靠近所述第一下料轴的方向移动,所述第四治具平台通过所述双动子直线电机沿着靠近所述第二下料轴的方向移动,所述第二治具平台和所述第三治具平台通过所述双动子直线电机移动到所述加工模块进行加工。
11、进一步地,所述双动子直线电机有两组,所述双动子直线电机上垂直于所述下料轴组设置在所述基座上,带动所述治具结构组移动。
12、进一步地,还包括料盒,所述料盒与所述上料轴组连接。
13、进一步地,所述激光轴还包括第一激光轴和第二激光轴,所述第一激光轴和所述第二激光轴间隔设置。
14、进一步地,还包括多组夹持设备,多组所述夹持设备分别与所述上料轴组和下料轴组连接。
15、进一步地,所述加工模块包括多组所述工业定位相机和多个所述激光轴,每组所述工业定位相机沿着每个所述激光轴的对角线设置。
16、本发明还提供一种全自动太阳能硅片激光加工控制方法,所述控制方法用于控制上述任意一项所述的全自动太阳能硅片激光加工系统,包括:
17、控制所述第一治具平台和所述第四治具平台通过所述上料轴组上料后往所述加工模块的方向移动;
18、当所述第一治具平台和所述第四治具平台到达加工模块时,控制所述上料轴组对所述第二治具平台和所述第三治具平台进行上料;
19、当所述第一治具平台和所述第四治具平台加工完成后,控制所述第一治具平台沿着靠近所述第一下料轴的方向移动和所述第四治具平台沿着靠近所述第二下料轴的方向移动进行下料,同时控制所述第二治具平台和所述第三治具平台往所述加工模块的方向移动;
20、当所述第二治具平台和所述第三治具平台加工完成后,控制所述第三治具平台沿着靠近所述第一下料轴的方向移动,控制所述第二治具平台沿着靠近所述第二下料轴的方向移动进行下料。
21、进一步地,所述当所述第一治具平台和所述第四治具平台到达加工模块时的步骤之后,包括:
22、控制所述工业定位相机对产品进行定位;
23、判断产品摆放位置是否超出阈值;
24、若超出阈值,则对产品进行辅助调整。
25、进一步地,所述控制所述第一治具平台和所述第四治具平台通过所述上料轴组上料后往所述加工模块移动的步骤,包括:
26、控制所述上料轴组对所述第一治具平台和所述第四治具平台进行上料;
27、待上料完成控制夹持设备将所述第一治具平台和所述第四治具平台移动到所述双动子直线电机上;
28、控制双动子直线电机将所述第一治具平台和所述第四治具平台往所述加工模块的方向移动。
29、进一步地,所述同时控制所述第二治具平台和所述第三治具平台往所述加工模块的方向移动的步骤之后,包括:
30、控制所述工业定位相机对产品进行定位;
31、控制所述加工模块对所述第二治具平台和所述第三治具平台上的产品进行加工。
32、有益效果:
33、在本发明中,通过合理巧妙地安排治具平台上料、下料和加工,使加工周期缩短,解决了激光加工产品在批量化生产过程中生产效率问题,同时利用工业定位相机在产品加工前进行定位调整,使产品在生产过程中材料的利用率大大提高,节约了很大的成本。
技术特征:
1.一种全自动太阳能硅片激光加工系统,其特征在于,包括:
2.根据权利要求1所述的全自动太阳能硅片激光加工系统,其特征在于,所述双动子直线电机有两组,所述双动子直线电机上垂直于所述下料轴组设置在所述基座上,带动所述治具结构组移动。
3.根据权利要求1所述的全自动太阳能硅片激光加工系统,其特征在于,还包括料盒,所述料盒与所述上料轴组连接。
4.根据权利要求1所述的全自动太阳能硅片激光加工系统,其特征在于,所述激光轴还包括第一激光轴和第二激光轴,所述第一激光轴和所述第二激光轴间隔设置。
5.根据权利要求1所述的全自动太阳能硅片激光加工系统,其特征在于,还包括多组夹持设备,多组所述夹持设备分别与所述上料轴组和下料轴组连接。
6.根据权利要求1所述的全自动太阳能硅片激光加工系统,其特征在于,所述加工模块包括多组所述工业定位相机和多个所述激光轴,每组所述工业定位相机沿着每个所述激光轴的对角线设置。
7.一种全自动太阳能硅片激光加工控制方法,所述控制方法用于控制权利要求1-6任意一项所述的全自动太阳能硅片激光加工系统,其特征在于,包括:
8.根据权利要求7所述的全自动太阳能硅片激光加工控制方法,其特征在于,所述当所述第一治具平台和所述第四治具平台到达加工模块时的步骤之后,包括:
9.根据权利要求7所述的全自动太阳能硅片激光加工控制方法,其特征在于,所述控制所述第一治具平台和所述第四治具平台通过所述上料轴组上料后往所述加工模块移动的步骤,包括:
10.根据权利要求7所述的全自动太阳能硅片激光加工控制方法,其特征在于,所述同时控制所述第二治具平台和所述第三治具平台往所述加工模块的方向移动的步骤之后,包括:
技术总结
本发明涉及到智能设备领域,本发明公开了一种全自动太阳能硅片激光加工系统及其控制方法,包括:基座;双动子直线电机;下料轴组;上料轴组;加工模块,包括激光轴和工业定位相机,激光轴和工业定位相机连接;治具结构组,治具结构组包括第一治具平台、第二治具平台、第三治具平台、第四治具平台;其中,第一治具平台和第四治具平台通过双动子直线电机移动到加工模块进行加工时,第二治具平台和第三治具平台通过上料轴组上料;当加工完成后,第一治具平台通过双动子直线电机沿着靠近第一下料轴的方向移动,第四治具平台通过双动子直线电机沿着靠近第二下料轴的方向移动,第二治具平台和第三治具平台通过双动子直线电机移动到加工模块进行加工。
技术研发人员:邹武兵,张德安,张峰源
受保护的技术使用者:深圳市韵腾激光科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!