车身地板柔性化焊接工装及焊接方法与流程
本发明属于汽车焊接,更具体地,涉及一种车身地板柔性化焊接工装及焊接方法。
背景技术:
1、白车身地板总成焊接时,地板分总成区通常采用“固定工位+专用焊接设备+专用搬运机器人”的工业化布局,该方法适用厂房面积大、生产节奏快的白车身自动化焊装线工业化实施,对于生产线体短,生产节拍慢,却要求通过自动化实现生产的白车身自动化焊装线,已有的工业化方案不具备良好的厂房利用率、投资回报率。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供一种车身地板柔性化焊接工装及焊接方法,在厂房资源受限、生产节奏不高的情况下,通过集成式工作站的工艺方案和工装结构,提高厂房及设备利用率,获得自动化程度高的焊装线。
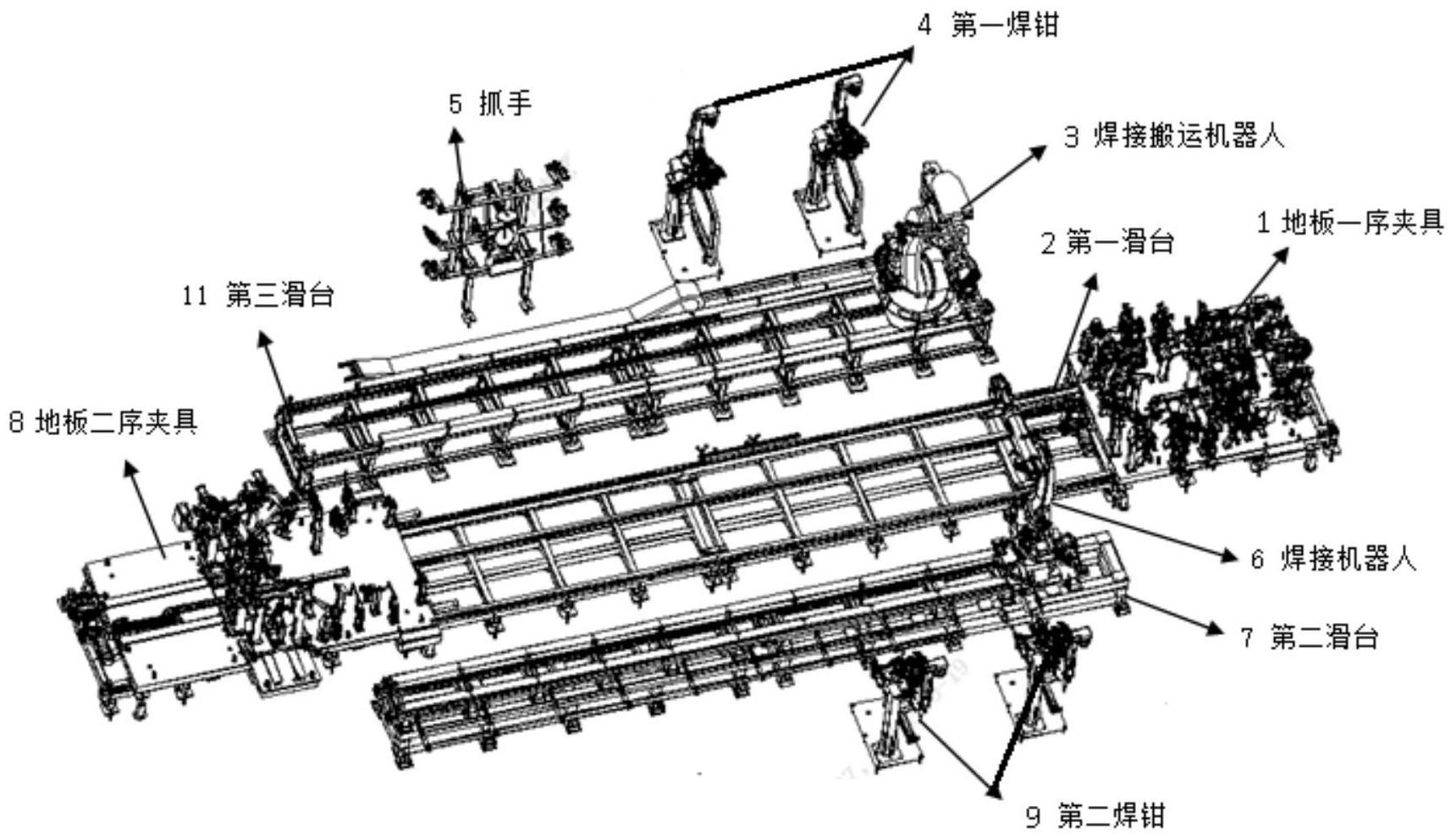
2、为实现上述目的,按照本发明的一方面,提供一种车身地板柔性化焊接工装,包括:移动机构、夹持机构、焊接机构以及控制系统;
3、所述移动机构,包括第一滑台、第二滑台和第三滑台,所述第二滑台和第三滑台设于所述第一滑台两侧;
4、所述夹持机构,包括地板一序夹具和地板二序夹具,所述地板一序夹具和地板二序夹具分别滑动设于所述第一滑台上;
5、所述焊接机构,包括焊接搬运机器人、焊接机器人、第一焊钳、第二焊钳、第一换枪盘、第二换枪盘和抓手,所述焊接搬运机器人滑动设于所述第二滑台上,所述右焊钳和所述抓手设于所述第二滑台一侧,所述焊接机器人滑动设于所述第三滑台上,所述左焊钳设于所述第三滑台一侧;所述焊接搬运机器人、焊接机器人上设有第一换枪盘,所述第一焊钳、第二焊钳和抓手上设有第二换枪盘;
6、所述控制系统,用于控制夹具和机器人在滑台上的运动、机器人焊接工具的更换以及机器人的焊接和搬运,实现车身地板柔性化焊接。
7、进一步地,所述地板一序夹具和地板二序夹具上设有减速机,所述第一滑台上设有齿条,所述减速机的动力齿轮与所述齿条啮合,所述减速机由控制系统控制运行。
8、进一步地,所述第一滑台上设有接近开关,所述地板一序夹具和地板二序夹具相近一侧均设有接近开关触头,所述接近开关与控制系统通信连接。
9、进一步地,第一焊接位处设有一所述接近开关,所述地板一序夹具滑动至第一焊接位处接近开关触头触发接近开关。
10、进一步地,第二焊接位处设有一所述接近开关,所述地板二序夹具滑动至第一焊接位处接近开关触头触发接近开关。
11、进一步地,两个所述接近开关之间设有越位检测开关,越位检测开关与控制系统通信连接。
12、进一步地,所述第一焊接位和第二焊接位之间设有防撞支座。
13、进一步地,所述地板一序夹具和所述地板二序夹具底部设有导轨滑块,所述地板一序夹具和所述地板二序夹具通过导轨滑块滑动设于所述第一滑台上。
14、进一步地,所述第一换枪盘和第二换枪盘上设有信号接口,所述焊接搬运机器人和焊接机器人通过第一换枪盘和第二换枪盘切换焊钳和/或抓手。
15、按照本发明的另一方面,提供一种车身地板柔性化焊接方法,包括以下步骤:
16、操作者将地板骨架总成与地板面板总成装夹于地板一序夹具,控制系统控制地板一序夹具移动至第一焊接位,控制系统控制焊接搬运机器人与第一焊钳连接、焊接机器人与第二焊钳连接,将地板骨架总成与地板面板总成焊接得到地板一序总成,焊接搬运机器人与抓手连接将地板一序总成抓起,焊接机器人与第二焊钳连接对地板一序总成进行补焊,焊接搬运机器人将地板一序总成运输至地板二序夹具;
17、操作者将前围总成,左侧围总成、右侧围总成和地板一序总成装夹于地板二序夹具,地板二序夹具移动至第二焊接位,控制系统控制焊接搬运机器人与第一焊钳连接、焊接机器人与第二焊钳连接,将地板一序总成与前围总成、左侧围总成、右侧围总成焊接得到地板总成;
18、地板一序夹具、焊接搬运机器人、第一焊钳、抓手、焊接机器人、地板二序夹具、第二焊钳归位,焊接完成。
19、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
20、1.本发明的车身地板柔性化焊接工装及焊接方法,设计一种伺服滑台夹具+移动式机器人+焊枪/抓手快换的柔性工装,通过将夹具设于滑台上实现夹具的变位,通过可移动式机器人实现工作站内各总成焊接位置的可达性,焊枪/抓手快换方式实现地板不同位置处零件的焊接,本发明的方法,仅通过两个机器人和两个焊接工位实现地板总成的焊接,节省了占用空间。
21、2.本发明的车身地板柔性化焊接工装及焊接方法,“伺服滑台夹具+移动式机器人+焊枪/抓手快换”相结合的车身地板柔性化焊接方法,解决了生产节奏较低的生产线产能过剩、空间和能源浪费的问题。
22、3.本发明通过“夹具变位”+“焊接设备变位”的双柔性化生产模式及工装结构,将地板一序、地板二序总成及地板补焊焊接需求合并在一个工位,通过一个工作站的方式实现自动化焊接。
技术特征:
1.一种车身地板柔性化焊接工装,其特征在于,包括:移动机构、夹持机构、焊接机构以及控制系统;
2.根据权利要求1所述的一种车身地板柔性化焊接工装,其特征在于,所述地板一序夹具(1)和地板二序夹具(8)上设有减速机,所述第一滑台(2)上设有齿条,所述减速机的动力齿轮与所述齿条啮合,所述减速机由控制系统控制运行。
3.根据权利要求2所述的一种车身地板柔性化焊接工装,其特征在于,所述第一滑台(2)上设有接近开关(10),所述地板一序夹具(1)和地板二序夹具(8)相近一侧均设有接近开关触头(12),所述接近开关(10)与控制系统通信连接。
4.根据权利要求3所述的一种车身地板柔性化焊接工装,其特征在于,第一焊接位处设有一所述接近开关(10),所述地板一序夹具(1)滑动至第一焊接位处接近开关触头(12)触发接近开关(10)。
5.根据权利要求4所述的一种车身地板柔性化焊接工装,其特征在于,第二焊接位处设有一所述接近开关(10),所述地板二序夹具(8)滑动至第一焊接位处接近开关触头(12)触发接近开关(10)。
6.根据权利要求5所述的一种车身地板柔性化焊接工装,其特征在于,两个所述接近开关(10)之间设有越位检测开关(13),越位检测开关(13)与控制系统通信连接。
7.根据权利要求1所述的一种车身地板柔性化焊接工装,其特征在于,所述第一焊接位和第二焊接位之间设有防撞支座(14)。
8.根据权利要求1所述的一种车身地板柔性化焊接工装,其特征在于,所述地板一序夹具(1)和所述地板二序夹具(8)底部设有导轨滑块,所述地板一序夹具(1)和所述地板二序夹具(8)通过导轨滑块滑动设于所述第一滑台(2)上。
9.根据权利要求1所述的一种车身地板柔性化焊接工装,其特征在于,所述第一换枪盘(15)和第二换枪盘(16)上设有信号接口,所述焊接搬运机器人(3)和焊接机器人(6)通过第一换枪盘(15)和第二换枪盘(16)切换焊钳和/或抓手。
10.一种车身地板柔性化焊接方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种车身地板柔性化焊接工装及焊接方法,包括:移动机构、夹持机构、焊接机构以及控制系统;移动机构,包括第一滑台、第二滑台和第三滑台;夹持机构,地板一序夹具和地板二序夹具分别滑动设于所述第一滑台上;所述焊接机构,焊接搬运机器人滑动设于所述第二滑台上,右焊钳和抓手设于第二滑台一侧,焊接机器人滑动设于所述第三滑台上;所述控制系统,用于控制夹具和机器人在滑台上的运动、机器人焊接工具的更换以及机器人的焊接和搬运,实现车身地板柔性化焊接。通过“夹具变位”+“焊接设备变位”的双柔性化生产模式及工装结构,将地板一序、地板二序总成及地板补焊焊接需求合并在一个工位,实现一站式自动化焊接。
技术研发人员:康琪,余平,姬延龙,李悦,樊亚龙
受保护的技术使用者:东风越野车有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!