一种打标机用位置识别和定位系统
本申请涉及打标机领域,具体是一种打标机用位置识别和定位系统。
背景技术:
1、打标机主要应用在机械工件、金属产品及零部件中,通过机械刻蚀、电腐蚀、气动或激光等方式对木材、金属或复合材料零部件产品表面进行标记。
2、现有打标机对工件进行定位时,会对利用特定夹具对工件进行固定。然后直接对夹具上的工件进行打标。但是这种定位方式需要人工手动安装和拆卸工件,且无法适用于传送带,因此无法高效率地进行打标。
技术实现思路
1、有鉴于此,本申请的目的是提供一种打标机用位置识别和定位系统,能够解决现有技术中由于无法适用于传送带导致打标效率低的技术问题。
2、为了实现上述目的,本申请采用了如下技术方案:
3、本申请的一种打标机用位置识别和定位系统,包括:
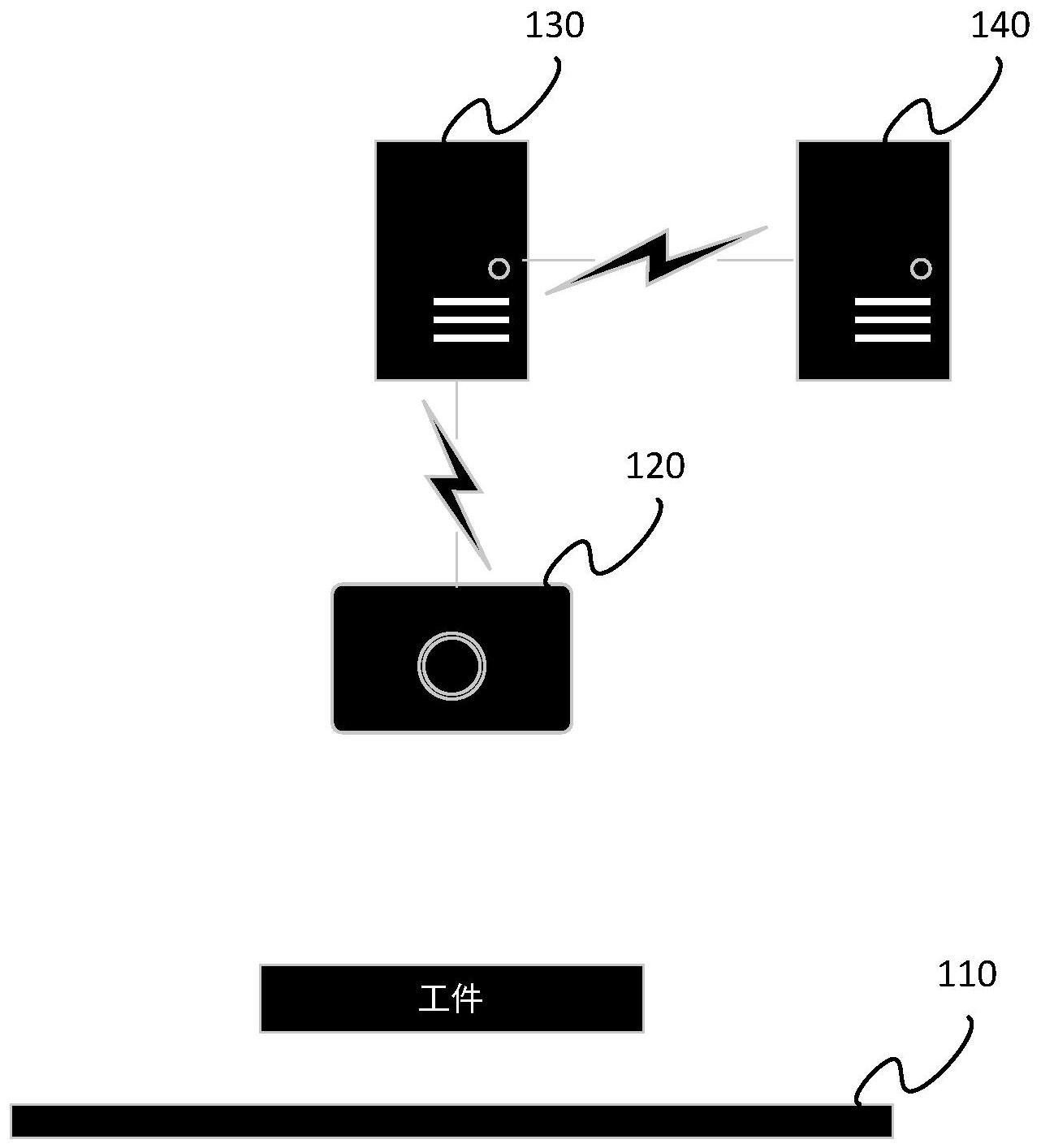
4、底板,放置于目标区域,所述底板的表面设有图案,用于与随传送机构运动的工件重合,以形成朝向目标方向的定位图像,其中,所述定位图像由所述工件遮挡所述图案形成;
5、图像采集模块,用于沿所述目标方向采集目标区域的定位图像;
6、识别模块,用于对所述定位图像进行位置识别,得到位置识别结果;
7、定位模块,用于根据所述位置识别结果生成用于控制传送机构的控制信号,以将工件定位至目标位置。
8、在本申请一实施例中,所述底板设置于所述传送机构的下方,所述工件的边缘沿竖直方向投影至所述底板的表面。
9、在本申请一实施例中,所述目标方向为从上方指向下方,且与水平面垂直的方向。
10、在本申请一实施例中,所述图案包括多根线条,所述多根线条的间距沿所述传送机构运动的方向逐渐增大或者逐渐减小。
11、在本申请一实施例中,对所述定位图像进行位置识别,得到位置识别结果,包括:
12、确定所述定位图像中的工件区域;
13、对所述定位图像中的工件区域进行涂抹,得到中间图像;
14、确定所述中间图像中的一组或者多组目标交点,其中,所述一组或者多组目标交点由所述工件区域的一个或者多个边缘与所述多根线条相交产生;
15、将所述一组或者多组目标交点的间距与对应的一组预设间距进行对比,在所述一组或者多组目标交点的间距与对应的一组预设间距一致时,判定工件的位置正确;否则判定工件的位置不正确,其中,所述间距为同一组目标交点中任意相邻目标交点的直线距离。
16、在本申请一实施例中,确定所述定位图像中的工件区域,包括:
17、将所述定位图像转换为灰度图像;
18、将所述灰度图像中灰度值处于目标灰度范围的区域确定为工件区域。
19、在本申请一实施例中,对所述定位图像中的工件区域进行涂抹,得到中间图像,包括:
20、对所述工件区域内的像素点进行统一赋值,得到中间图像,其中,赋值后的像素点的灰度值为第一灰度值。
21、在本申请一实施例中,确定所述中间图像中的一组或者多组目标交点,包括:
22、确定所述多根线条的灰度值,其中,所述多根线条的灰度值为第二灰度值;
23、扫描所述中间图像,将满足目标条件的两个任意相邻像素点标记为目标交点,其中,所述目标条件包括:其中一个相邻像素点的灰度值为所述第一灰度值,另一个相邻像素点的灰度值为所述第二灰度值;
24、按照所述工件区域的边缘与所述目标交点的对应关系进行分组,得到一组或者多组目标交点。
25、在本申请一实施例中,判定工件的位置不正确,包括:
26、在所述一组或者多组目标交点的间距均大于对应的预设间距时,判定工件位置超过目标位置;在所述一组或者多组目标交点的间距均小于对应的预设间距时,判定工件位置还未到目标位置。
27、在本申请一实施例中,根据所述位置识别结果生成用于控制传送机构的控制信号,包括:
28、在工件的位置正确时,生成停止信号,以控制所述传送机构停止;在工件位置超过目标位置时,生成后退信号,以控制所述传送机构后退并将工件运送至目标位置;在工件位置还未到目标位置时,不生成任何信号,以使得工件继续随传送机构运动至目标位置。
29、本申请的有益效果是:本申请的一种打标机用位置识别和定位系统,通过在传送机构下方设置底板,底板的表面上设有图案。工件随传送机构运送至目标区域时,工件对底板表面的部分图案进行遮挡,从而形成用于对工件进行定位的定位图像。然后通过设置图像采集模块对定位图像进行采集,传输至图像识别模块中,从而对定位图像进行识别,得到工件的位置信息,对工件的位置进行识别,最后定位模块根据工件的位置识别结果对传送机构进行控制,从而对工件进行定位。本申请通过图像识别,对运动中的工件进行位置识别和定位,从而使得本申请中的识别定位方法可以适用于高效率的传送带打标机中。
技术特征:
1.一种打标机用位置识别和定位系统,其特征在于,包括:
2.根据权利要求1所述的一种打标机用位置识别和定位系统,其特征在于,所述底板设置于所述传送机构的下方,所述工件的边缘沿竖直方向投影至所述底板的表面。
3.根据权利要求1所述的一种打标机用位置识别和定位系统,其特征在于,所述目标方向为从上方指向下方,且与水平面垂直的方向。
4.根据权利要求1所述的一种打标机用位置识别和定位系统,其特征在于,所述图案包括多根线条,所述多根线条的间距沿所述传送机构运动的方向逐渐增大或者逐渐减小。
5.根据权利要求4所述的一种打标机用位置识别和定位系统,其特征在于,对所述定位图像进行位置识别,得到位置识别结果,包括:
6.根据权利要求5所述的一种打标机用位置识别和定位系统,其特征在于,确定所述定位图像中的工件区域,包括:
7.根据权利要求6所述的一种打标机用位置识别和定位系统,其特征在于,对所述定位图像中的工件区域进行涂抹,得到中间图像,包括:
8.根据权利要求7所述的一种打标机用位置识别和定位系统,其特征在于,确定所述中间图像中的一组或者多组目标交点,包括:
9.根据权利要求5所述的一种打标机用位置识别和定位系统,其特征在于,判定工件的位置不正确,包括:
10.根据权利要求9所述的一种打标机用位置识别和定位系统,其特征在于,根据所述位置识别结果生成用于控制传送机构的控制信号,包括:
技术总结
本申请涉及一种打标机用位置识别和定位系统,通过在传送机构下方设置底板,底板的表面上设有图案。工件随传送机构运送至目标区域时,工件对底板表面的部分图案进行遮挡,从而形成用于对工件进行定位的定位图像。然后通过设置图像采集模块对定位图像进行采集,传输至图像识别模块中,从而对定位图像进行识别,得到工件的位置信息,对工件的位置进行识别,最后定位模块根据工件的位置识别结果对传送机构进行控制,从而对工件进行定位。本申请通过图像识别,对运动中的工件进行位置识别和定位,从而使得本申请中的识别定位方法可以适用于高效率的传送带打标机中。
技术研发人员:彭辉,张伟,黄崇富,林雪冬,李仕兴,徐一鸣
受保护的技术使用者:重庆工程职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!