建筑施工智能机器人的制作方法
本发明涉及建筑施工工程,具体涉及一种建筑施工智能机器人。
背景技术:
1、钢筋是建筑施工中常用的一种材料,多与混凝土配合作为道路、桥梁等结构的组成部分。在建筑施工现场,钢筋剪切是钢筋加工必不可少的一项环节,而钢筋规格繁多,不同施工场景和施工环节所需的钢筋长度有所不同,因此在施工现场需要剪切出不同长度的钢筋。
2、由于钢筋应用广泛、使用频繁,钢筋的加工效率越来越受到工程建设者的重视,但是受到施工场地空间限制,大型钢筋加工设备无法在施工现场有效开展工作,随着机械自动化技术发展,具有钢筋剪切功能的建筑施工机器人应运而生,例如现有技术公开了一种全自动分段导入式钢筋剪切机器人,其由钢筋摆放架、进料平台、切割设备、动力输出设备、切割设备和控制台组成,其钢筋切割长度控制是通过在切割平台上设置长度阻拦器进行钢筋下料长度的调节。虽然该现有技术相比现有的大型钢筋加工设备,占地空间小、移动性强,但是钢筋切割长度调节依赖于手动调节长度阻拦器到达预定位置后通过控制长度阻拦器下落及多个长度阻拦器配合才能实现钢筋下料长度的调节,调节繁琐,影响钢筋加工效率。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中钢筋切割长度调节繁琐,影响钢筋剪切效率的缺陷,从而提供一种具有切割长度调节机构的建筑施工智能机器人。
2、为此,本发明提供一种建筑施工智能机器人,包括:
3、履带式行走机构,包括移动底座、对称安装在移动底座外壁上的两条履带轮以及固定连接在所述移动底座上端的承载板,所述承载板的内部安装有角度调节电机,所述承载板的上方安装有连接盘,所述连接盘与所述角度调节电机连接;
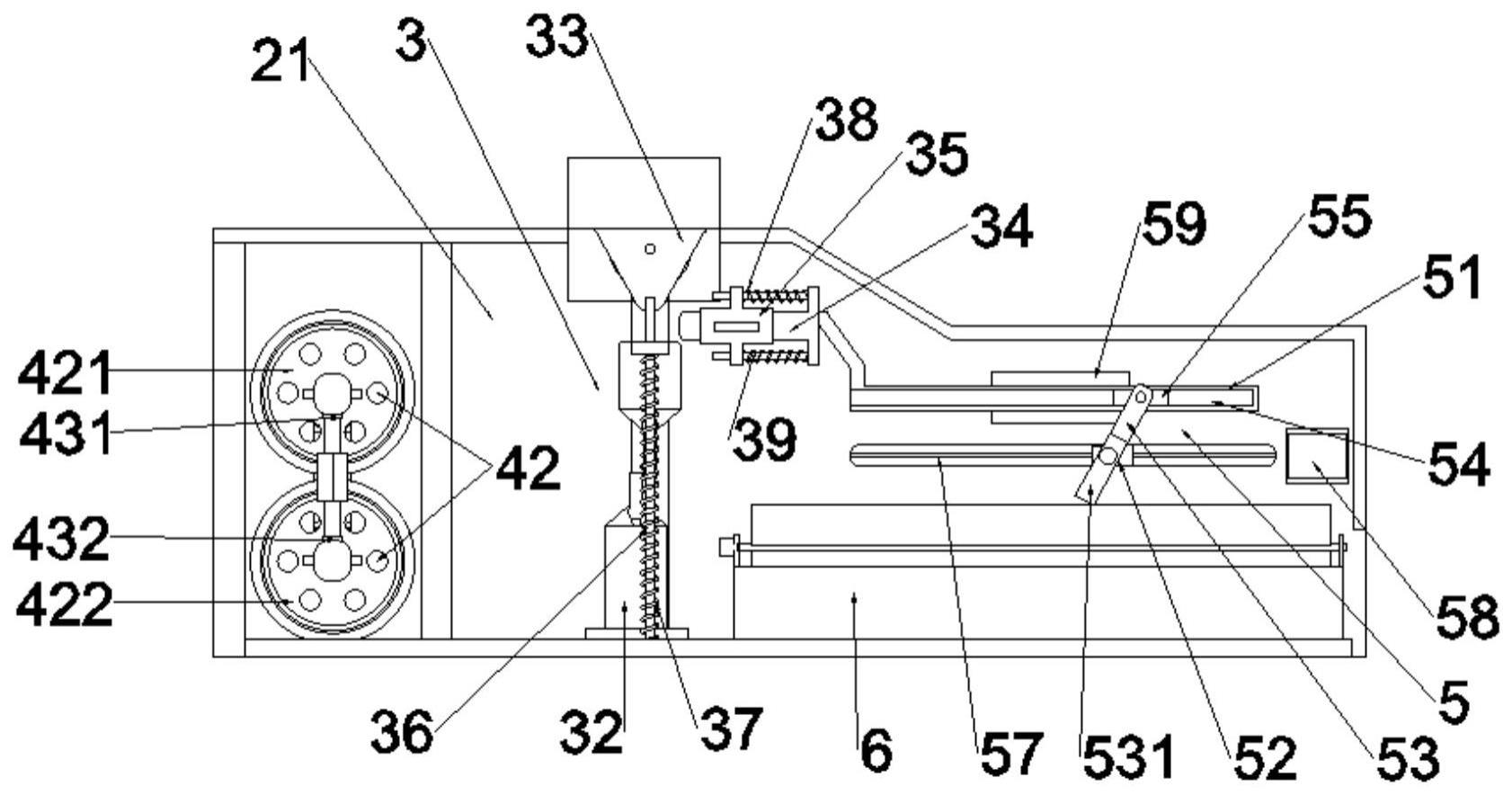
4、至少一个切割箱,安装在所述连接盘的上方,所述切割箱包括箱体,所述箱体内部安装有送料机构、切割机构以及切割长度调节机构,所述送料机构设置为用于向所述切割机构及所述切割长度调节机构方向输送钢筋,所述切割机构设置为用于所述钢筋穿过并切割钢筋;所述切割长度调节机构位于切割机构远离送料机构的一侧,设置为用于对钢筋的切割长度进行控制;所述切割长度调节机构包括:
5、推动杆,可往复滑动地连接在箱体内,所述推动杆靠近所述切割机构的一端设有可移动触发所述切割机构进行切割的触发结构;
6、连接块,可往复滑动地连接在所述箱体内,所述连接块的滑动路径与所述推动杆的滑动路径平行设置,所述连接块具有固定状态和活动状态;
7、活动杆,连接于所述推动杆与所述连接块之间,所述活动杆的第一端与推动杆转动连接,第二端与所述连接块转动连接,所述第二端具有向所述送料机构的输送路径延伸以被输送中的钢筋推动的被触发部;
8、在所述连接块处于所述固定状态时,所述钢筋在被输送中触发并推动所述被触发部,所述活动杆相对所述连接块转动并推动所述推动杆向靠近所述切割机构方向滑动,所述推动杆通过所述触发结构触发所述切割机构切割所述钢筋;
9、在所述连接块处于所述活动状态时,通过调节所述连接块向靠近或远离所述切割机构方向滑动同时带动所述活动杆的所述被触发部以调节所述钢筋的切割长度。
10、可选地,所述推动杆的外壁上开设有调节槽,所述调节槽内安装有致动块,所述致动块具有与所述调节槽固定的第二固定状态和可相对所述调节槽滑动的第二活动状态,所述活动杆的所述第一端与所述致动块转动连接。
11、可选地,所述致动块为通电的电磁铁块,当所述电磁铁块通电时所述电磁铁块处于所述第二固定状态或所述第二活动状态,当所述电磁铁块关闭通电时所述电磁铁块处于所述第二活动状态或所述第二固定状态。
12、可选地,还包括在所述箱体内壁上开设的矩形窗口,所述矩形窗口内转动连接有第二螺纹杆,所述第二螺纹杆的一端连接有控制电机,所述连接块与所述第二螺纹杆螺纹连接,所述控制电机用于控制所述连接块沿所述第二螺纹杆滑动;
13、开启所述控制电机的同时将所述电磁铁块调节至所述第二活动状态,带动所述连接块向靠近或远离所述切割机构方向滑动,所述连接块滑动时通过活动杆带动所述电磁铁块一起移动,通过此种可调节所述活动杆距离所述切割机构的距离,进而改变钢筋的切割长度。
14、可选地,所述箱体内部对称固定连接有支撑架,所述推动杆与所述支撑架滑动连接。。
15、本发明技术方案,具有如下优点:
16、1.本发明提供的建筑施工智能机器人,其切割长度调节机构包括推动杆位于切割机构远离送料机构的一侧,包括可往复滑动地连接在箱体内的推动杆,可往复滑动地连接在箱体内的连接块和用于连接推动杆和连接块的活动杆,连接块具有固定状态和活动状态,当连接块处于活动状态时,通过调节所述连接块向靠近或远离所述切割机构方向滑动同时带动所述活动杆的所述被触发部以调节所述钢筋的切割长度,此种长度调节机构结构简单,节约材料和成本,同时钢筋长度调节机构操作方便,可以增加钢筋剪切效率。
17、2.本发明提供的建筑施工智能机器人,其切割长度调节机构在推动杆的外壁上开设有调节槽,调节槽内安装有致动块,致动块具有与调节槽固定的第二固定状态和可相对于调节槽滑动的第二活动状态,活动杆的第一端与致动块转动连接,通过在推动杆上设置具有活动状态的致动块,可以使得活动杆在水平方向相对推动杆进行移动,避免了活动杆转动过程中对推动杆造成较大内力而引起推动杆的变形。
18、3.本发明提供的建筑施工智能机器人,其切割长度调节机构将致动块设置为通电的电磁铁块,当电磁铁块通电时电磁铁块处于第二固定状态或第二活动状态,当电磁铁块关闭通电时电磁铁块处于第二活动状态或第二固定状态,通过通电和失电可以控制电磁铁块进行状态的转换,实现了电动控制,方便操作人员进行操作。
19、4.本发明提供的建筑施工智能机器人,其切割长度调节机构在箱体内壁上开设了矩形窗口,矩形窗口内转动连接有第二螺纹杆,第二螺纹杆的一端连接有控制电机,连接块与第二螺纹杆螺纹连接,控制电机用于控制连接块沿第二螺纹杆滑动;开启控制电机的同时将电磁铁块调节至第二活动状态,带动连接块向靠近或远离切割机构方向滑动,连接块滑动时通过活动杆带动电磁铁块一起移动,通过此种可调节活动杆距离切割机构的距离,进而改变钢筋的切割长度,通过控制电机和第二螺纹杆共同作用及电磁铁块的配合,使得钢筋切割长度调节实现了电动调节,减少了操作人员的工作,从而使得钢筋切割长度调节更加简单,且更加安全。
20、5.本发明提供的建筑施工智能机器人,箱体内部对称固定连接有支撑架,支撑架可以保证推动杆滑动的精度,避免了推动杆无序运动进而无法触发切割机构的问题。
技术特征:
1.一种建筑施工智能机器人,其特征在于,包括:
2.根据权利要求1所述的建筑施工智能机器人,其特征在于,所述推动杆的外壁上开设有调节槽,所述调节槽内安装有致动块,所述致动块具有与所述调节槽固定的第二固定状态和可相对所述调节槽滑动的第二活动状态,所述活动杆的所述第一端与所述致动块转动连接。
3.根据权利要求2所述的建筑施工智能机器人,其特征在于,所述致动块为通电的电磁铁块,当所述电磁铁块通电时所述电磁铁块处于所述第二固定状态或所述第二活动状态,当所述电磁铁块关闭通电时所述电磁铁块处于所述第二活动状态或所述第二固定状态。
4.根据权利要求3所述的建筑施工智能机器人,其特征在于,还包括在所述箱体内壁上开设的矩形窗口,所述矩形窗口内转动连接有第二螺纹杆,所述第二螺纹杆的一端连接有控制电机,所述连接块与所述第二螺纹杆螺纹连接,所述控制电机用于控制所述连接块沿所述第二螺纹杆滑动;
5.根据权利要求1所述的建筑施工智能机器人,其特征在于,所述箱体内部对称固定连接有支撑架,所述推动杆与所述支撑架滑动连接。
技术总结
本发明提供一种建筑施工智能机器人,属于建筑施工工程技术领域,包括:履带式行走机构,包括移动底座、对称安装在移动底座外壁上的两条履带轮以及固定连接在所述移动底座上端的承载板,所述承载板的内部安装有角度调节电机,所述承载板的上方安装有连接盘,所述连接盘与所述角度调节电机连接;至少一个切割箱,安装在所述连接盘的上方,所述切割箱包括箱体,所述箱体内部安装有送料机构、切割机构以及切割长度调节机构,所述送料机构设置为用于向所述切割机构及所述切割长度调节机构方向输送钢筋,所述切割机构设置为用于所述钢筋穿过并切割钢筋;所述切割长度调节机构位于切割机构远离送料机构的一侧,设置为用于对钢筋的切割长度进行控制。
技术研发人员:翟浩博,张克胜,陈洪敏,任宝双,胡庆康,郁志伟,宋卓华
受保护的技术使用者:中交建筑集团有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!