一种新型智能机器人焊接设备的制作方法
本发明涉及焊接设备,尤其涉及一种新型智能机器人焊接设备。
背景技术:
1、现有技术中,用于实现管道与管件(法兰、弯头及三通等)之间焊接的设备通常包括两个工位,即组对工位及焊接工位。具体在焊接过程中,一般先在组对工位对定位后的管道与管件采用人工tig焊,即非熔化极惰性气体钨极保护焊,点焊以完成组对固定工序,然后通过行车等转移设备将组对固定后的管道、管件吊装至焊接工位,再进一步采用人工tig焊进行焊缝的打底、填充、盖面焊以完成焊缝的全面焊接。
2、然现有技术存在以下问题:对应于两个工位,需要配备两名焊接人员,人员成本消耗大;人工参与过多,无法保障焊接质量;两个工位之间的焊件流转需要吊装设备进行转移,耗时长且降低整个焊接过程的安全系数。
技术实现思路
1、本发明的目的是为了解决现有技术中存在人工焊接安全性低的缺点,而提出的一种新型智能机器人焊接设备。
2、为了实现上述目的,本发明采用了如下技术方案:
3、设计一种新型智能机器人焊接设备,包括底座,所述底座的顶部固定安装有第一电机,所述第一电机的输出轴上固定安装有转盘,所述转盘的顶部固定安装有固定座,所述固定座的外侧固定安装有第二电机,所述第二电机的输出轴固定安装有转臂,所述转臂的顶端固定安装有安装箱,所述安装箱的一侧安装有第一转向机构,所述第一转向机构的输出端安装有第二转向机构,所述第二转向机构的输出端安装有焊接机构。
4、优选的,所述第一转向机构包括安装筒、内齿圈、第一齿轮、转动套和第一安装板;所述安装筒固定安装在安装箱的外侧,所述转动套转动安装在安装筒内,所述内齿圈固定安装在转动套内侧的一端,所述第一齿轮转动安装在安装箱的侧壁上、且与内齿圈啮合,所述第一安装板固定安装在转动套的另一端。
5、优选的,所述第二转向机构包括空心轴、锥齿圈、第一安装座、锥齿轮、转动座和连接套;所述空心轴贯穿第一安装板且与第一安装板转动连接,所述锥齿圈固定安装在空心轴的一端,所述第一安装座固定安装在第一安装板的外侧,所述转动座的两端均通过销轴与第一安装座转动连接,所述锥齿轮与转动座同轴固定连接、且与锥齿圈啮合,所述连接套固定安装在转动座上。
6、优选的,所述空心轴的另一端固定安装有外齿圈,所述外齿圈位于转动套的内部,所述安装箱的外侧转动安装有第二齿轮,所述第二齿轮与外齿圈啮合。
7、优选的,所述焊接机构包括第一转轴、万向联轴器、第二转轴和焊接组件;所述第一转轴贯穿空心轴、且与空心轴转动连接,所述第二转轴贯穿连接套、且与连接套转动连接,所述万向联轴器转动安装在转动座内侧,所述第一转轴与第二转轴之间通过万向联轴器固定连接,所述焊接组件安装在连接套的端部。
8、优选的,所述焊接组件包括第二安装板、第二安装座、两个蜗轮和蜗杆;所述第二安装板固定安装在连接套的端部,所述第二安装座固定安装在第二安装板的外侧,两个所述蜗轮分别转动安装在第二安装座内侧的两端,所述蜗杆转动安装在第二安装板上、且位于两个蜗轮之间,所述蜗杆的一端与第二转轴固定连接、且与两个蜗轮啮合。
9、优选的,两个所述蜗轮均同轴固定安装有第一连杆,两个所述第一连杆远离蜗轮的一端均铰接有第二连杆,两个所述第二连杆远离第一连杆的一端铰接有同一焊接座,所述焊接座上固定安装有焊枪。
10、优选的,所述安装箱内部固定安装有第三电机、第四电机和第五电机;所述第三电机的输出轴与第一齿轮固定连接,所述第四电机的输出轴与第二齿轮固定连接,所述第五电机的输出轴与第一转轴固定连接。
11、优选的,所述焊接座上还固定安装有摄像头,所述安装箱上安装有相应的控制器,所述摄像头与控制器信号连接,所述第一电机、第二电机、第三电机、第四电机、第五电机均与控制器电性连接。
12、本发明提出的一种新型智能机器人焊接设备,有益效果在于:本发明的焊接机构可以实现多个自由度的调整,从而可以准确的对工件进行焊接,无需人工进行操作调整,不仅减少了人工劳动量,而且提高了工作的安全性。
技术特征:
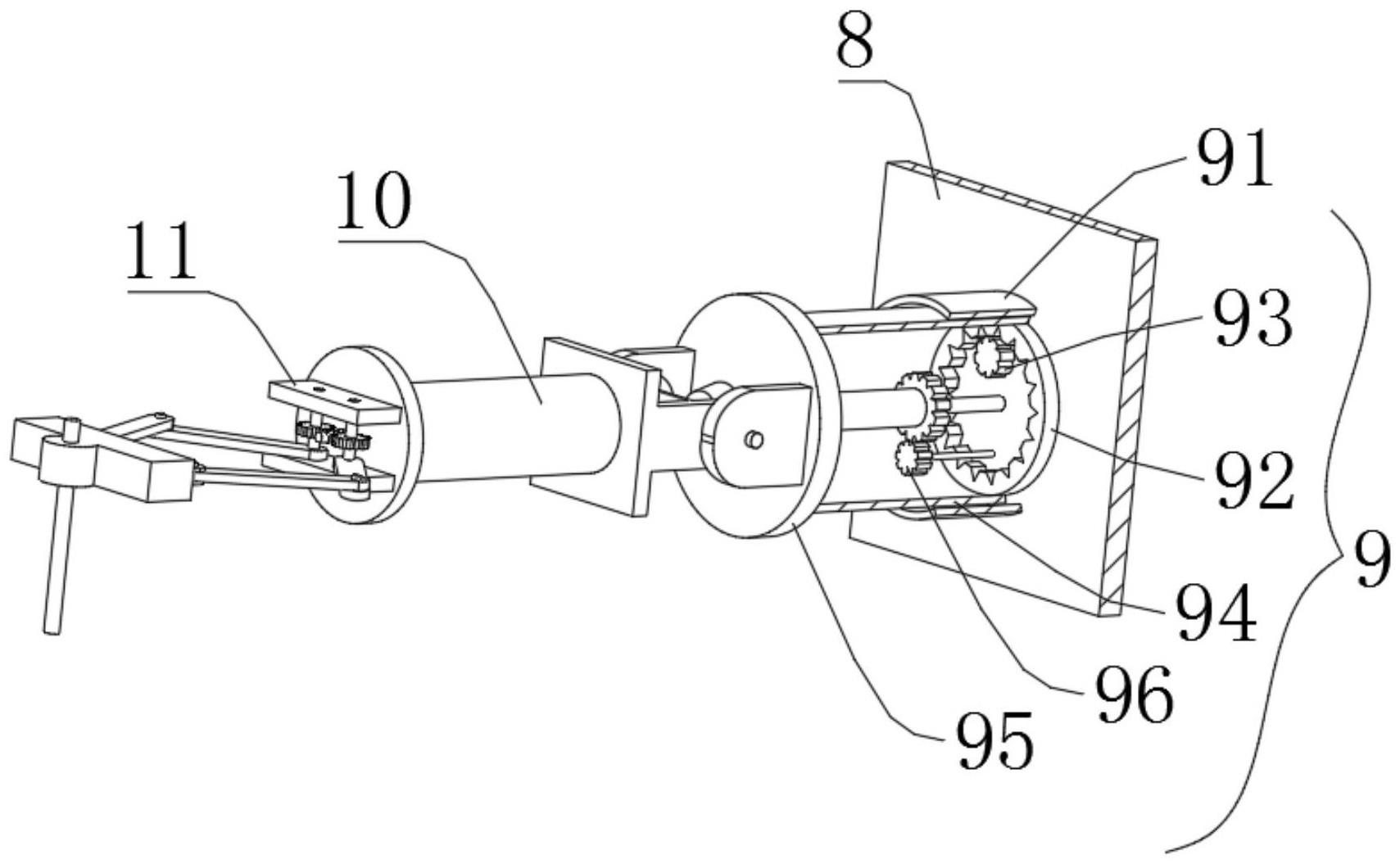
1.一种新型智能机器人焊接设备,其特征在于,包括安装箱(8)、第一转向机构(9)、第二转向机构(10)和焊接机构(11);所述安装箱(8)固定安装在转臂(6)的顶端,所述第一转向机构(9)安装在安装箱(8)的一侧,所述第二转向机构(10)安装在第一转向机构(9)的输出端,所述焊接机构(11)安装在第二转向机构(10)的输出端。
2.根据权利要求1所述的新型智能机器人焊接设备,其特征在于,所述第一转向机构(9)包括安装筒(91)、内齿圈(92)、第一齿轮(93)、转动套(94)和第一安装板(95);所述安装筒(91)固定安装在安装箱(8)的外侧,所述转动套(94)转动安装在安装筒(91)内,所述内齿圈(92)固定安装在转动套(94)内侧的一端,所述第一齿轮(93)转动安装在安装箱(8)的侧壁上、且与内齿圈(92)啮合,所述第一安装板(95)固定安装在转动套(94)的另一端。
3.根据权利要求2所述的新型智能机器人焊接设备,其特征在于,所述第二转向机构(10)包括空心轴(101)、锥齿圈(103)、第一安装座(104)、锥齿轮(105)、转动座(106)和连接套(107);所述空心轴(101)贯穿第一安装板(95)且与第一安装板(95)转动连接,所述锥齿圈(103)固定安装在空心轴(101)的一端,所述第一安装座(104)固定安装在第一安装板(95)的外侧,所述转动座(106)的两端均通过销轴与第一安装座(104)转动连接,所述锥齿轮(105)与转动座(106)同轴固定连接、且与锥齿圈(103)啮合,所述连接套(107)固定安装在转动座(106)上。
4.根据权利要求3所述的新型智能机器人焊接设备,其特征在于,所述空心轴(101)的另一端固定安装有外齿圈(102),所述外齿圈(102)位于转动套(94)的内部,所述安装箱(8)的外侧转动安装有第二齿轮(96),所述第二齿轮(96)与外齿圈(102)啮合。
5.根据权利要求4所述的新型智能机器人焊接设备,其特征在于,所述焊接机构(11)包括第一转轴(111)、万向联轴器(112)、第二转轴(113)和焊接组件(114);所述第一转轴(111)贯穿空心轴(101)、且与空心轴(101)转动连接,所述第二转轴(113)贯穿连接套(107)、且与连接套(107)转动连接,所述万向联轴器(112)转动安装在转动座(106)内侧,所述第一转轴(111)与第二转轴(113)之间通过万向联轴器(112)固定连接,所述焊接组件(114)安装在连接套(107)的端部。
6.根据权利要求5所述的新型智能机器人焊接设备,其特征在于,所述焊接组件(114)包括第二安装板(1141)、第二安装座(1142)、两个蜗轮(1143)和蜗杆(1144);所述第二安装板(1141)固定安装在连接套(107)的端部,所述第二安装座(1142)固定安装在第二安装板(1141)的外侧,两个所述蜗轮(1143)分别转动安装在第二安装座(1142)内侧的两端,所述蜗杆(1144)转动安装在第二安装板(1141)上、且位于两个蜗轮(1143)之间,所述蜗杆(1144)的一端与第二转轴(113)固定连接、且与两个蜗轮(1143)啮合。
7.根据权利要求6所述的新型智能机器人焊接设备,其特征在于,两个所述蜗轮(1143)均同轴固定安装有第一连杆(1145),两个所述第一连杆(1145)远离蜗轮(1143)的一端均铰接有第二连杆(1146),两个所述第二连杆(1146)远离第一连杆(1145)的一端铰接有同一焊接座(1147),所述焊接座(1147)上固定安装有焊枪(1148)。
8.根据权利要求7所述的新型智能机器人焊接设备,其特征在于,所述安装箱(8)内部固定安装有第三电机(81)、第四电机(82)和第五电机(83);所述第三电机(81)的输出轴与第一齿轮(93)固定连接,所述第四电机(82)的输出轴与第二齿轮(96)固定连接,所述第五电机(83)的输出轴与第一转轴(111)固定连接。
9.根据权利要求8所述的新型智能机器人焊接设备,其特征在于,所述焊接座(1147)上还固定安装有摄像头(1149),所述安装箱(8)上安装有相应的控制器,所述摄像头(1149)与控制器信号连接,所述第一电机(2)、第二电机(5)、第三电机(81)、第四电机(82)、第五电机(83)均与控制器电性连接。
技术总结
本发明涉及焊接设备技术领域,尤其是一种新型智能机器人焊接设备,包括底座,底座的顶部固定安装有第一电机,第一电机的输出轴上固定安装有转盘,转盘的顶部固定安装有固定座,固定座的外侧固定安装有第二电机,第二电机的输出轴固定安装有转臂,转臂的顶端固定安装有安装箱,安装箱的一侧安装有第一转向机构,第一转向机构的输出端安装有第二转向机构,第二转向机构的输出端安装有焊接机构。本发明的焊接机构可以实现多个自由度的调整,从而可以准确的对工件进行焊接,无需人工进行操作调整,不仅减少了人工劳动量,而且提高了工作的安全性。
技术研发人员:张泽宁,张志清
受保护的技术使用者:襄阳宁诺新能源汽车服务有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!