本发明涉及龙门机构,尤其涉及龙门双驱的横梁调整方法、结构及应用。
背景技术:
1、龙门结构,通俗地说一根横梁连接两个支腿与地面紧固组成的像一个门框一样的结构。是运动平台中的一种常见结构。这种结构可以使上端轴上安装执行机构(如拾取和放置机构,相机等)从上端接近被加工件。
2、龙门结构的不同架构:通常,龙门结构有单驱动单反馈、双驱动单反馈、双驱动双反馈以及很少使用的单驱动双反馈。
3、龙门架构的选择通常需要综合考虑性能需求、制造成本以及技术难度等因素。当追求低成本、适中性能时,可选择单驱单反架构龙门,比如某些3d打印机;当追求高性能时应当选择双驱单反甚至双驱双反架构,比如半导体行业相关的设备。关于直线双驱龙门系统:直线双驱龙门系统是由xy轴直线模组+z轴线性模组组成,其底座为大理石平台,组合精度高、稳定性强。它常用于试验研究精密加工、高精仪器设备等相关课题、直线双驱龙门平台的设计制造方面。在半导体晶圆检测设备、激光加工设备、smt等领域,直驱龙门和大跨度龙门平台的应用越来越广泛。这些龙门平台大部分采用直线电机或旋转伺服来驱动控制。
4、直线双驱龙门系统的优点:1、重复定位高。2、平台采用高创驱动器,响应频率高、反应速度快、功能强大、稳定性强。3、平台结合零背隙的直接驱动技术,机构简单,没有机械传动误差。4、直线电机双驱结构可提高组合精度,利用直线电机的高精特点实现很好的同步性,结合大理石平台的高刚性保证组合精度。
5、目前龙门双驱的横梁平行度调整便捷度和精度不理想,尤其是竖向直线运动调节时横梁变形无法误差,在变小较大时形成干涉,导致无法调整。
技术实现思路
1、为了解决目前龙门机构的横梁平行度调整便捷度和精度不理想的缺陷,本发明提出龙门双驱的横梁调整方法、结构及应用。
2、本发明采用的技术方案是:
3、龙门双驱的横梁调整方法,包括
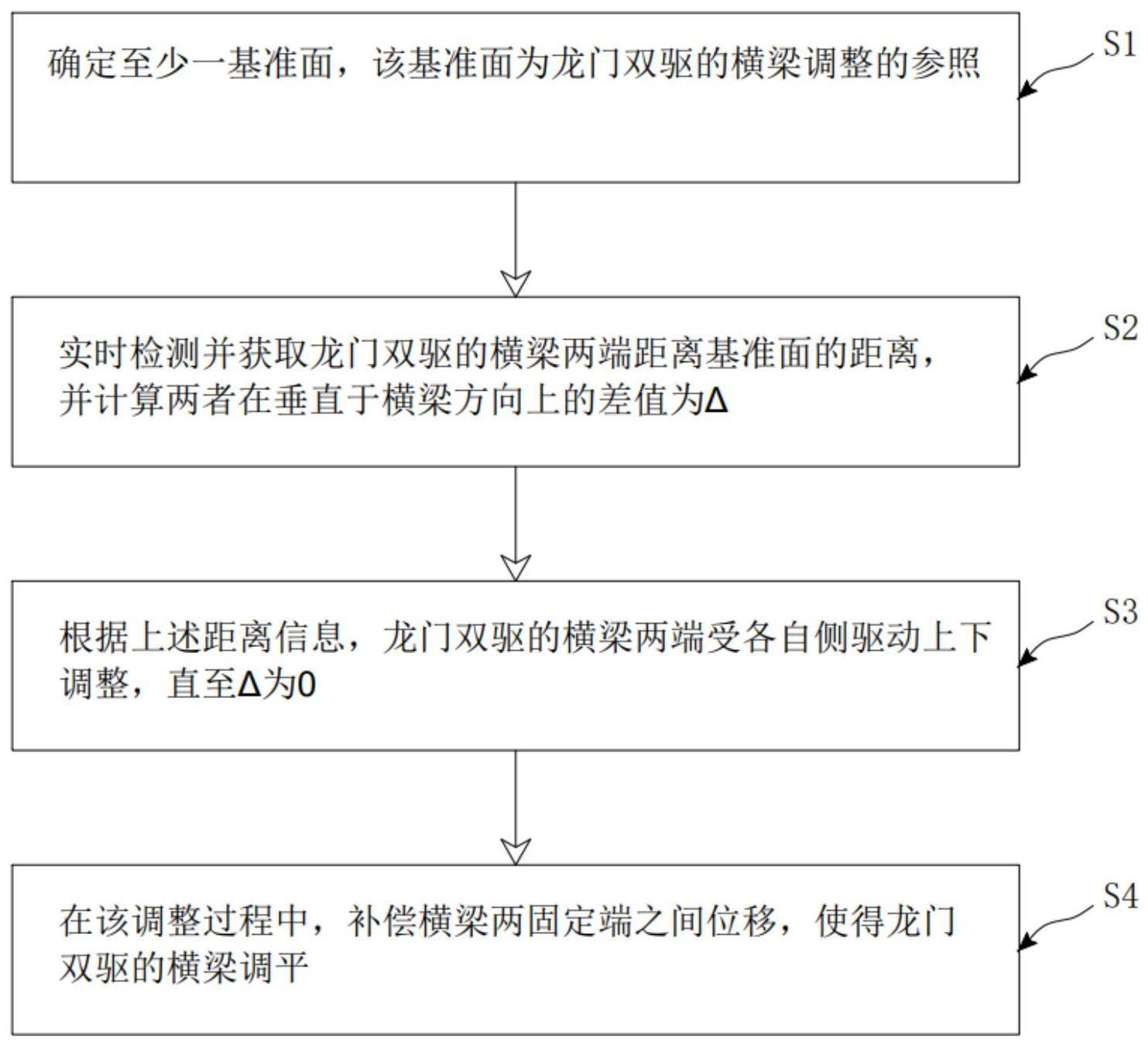
4、至少一基准面,该基准面为龙门双驱的横梁调整的参照,预先确定基准面之间的距离;
5、实时检测并获取龙门双驱的横梁两端距离基准面的距离,并计算两者在垂直于横梁方向上的差值为δ;
6、根据上述距离信息,龙门双驱的横梁两端受各自侧驱动上下调整,直至δ为0;
7、在该调整过程中,补偿横梁两固定端之间位移,该位移包括刚性位移和/或形变位移,使得龙门双驱的横梁调平。
8、工作时,龙门双驱的横梁,在预先确定参考的基准面条件下,
9、优选的,δ调整至0的过程中,误差控制±5mm。
10、优选的,δ调整至0时,横梁中部处于预起拱状态,便于抵消横梁上安装荷载产生的形变。
11、优选的,横梁一端发生角位移和竖向位移,另一端发生角位移、竖向位移及轴向位移,该轴向位移用于补偿横梁两端上下移动过程中发生的轴向变形位移。
12、优选的,横梁发生角位移和竖向位移的一端采用固定轴与龙门双驱的一驱动连接;
13、横梁发生角位移、竖向位移及轴向位移的一端采用偏心轴与与龙门双驱的另一驱动连接。
14、优选的,通过若干激光测距sensor,实时检测龙门双驱的横梁两端距离基准面的距离,距离为若干激光测距sensor的加权平均值。
15、优选的,δ调整至0的过程中采用线性变化。
16、一种龙门双驱的横梁调整结构,包括两竖向驱动、偏心轴连接件、固定轴连接件、机架、若干测距单元以及控制部;
17、两竖向驱动位于在机架两侧,且与机架垂直设置;横梁的两端分别通过偏心轴连接件和固定轴连接件与两竖向驱动一一对应连接;
18、若干测距单元分成两组,每组至少一个测距单元;两组测距单元分别设置在机架两侧对应横梁的两端,且若干测距单元的测距起点均处于机架上一基准面上,测距单元的测距终点位于横梁两端一致性测距面上;
19、控制部连接测距单元及两竖向驱动;接收反馈的距离信息,进行调整计算,并控制两竖向驱动进行横梁调整。
20、优选的,偏心轴连接件包括偏心轴和u型固定座;偏心轴中部具有偏心轴段,两端具有固定轴端;固定轴端的轴线与偏心轴段的轴线不共线,固定轴端铰接在u型固定座一侧的凹槽内,u型固定座的另一侧固定连接竖向驱动,横梁一端具有与偏心轴段适配的偏心轴孔;偏心轴段与横梁的偏心轴孔配合,使得横梁一端通过偏心轴连接件与竖向驱动连接;在一些实施例中,横梁的偏心轴孔内偏心轴段上安装有间隔环,用于平滑补偿位移;在一些实施例中,u型固定座与横梁之间的固定轴端上安装用卡环,进一步用于平滑补偿位移。
21、本发明还提出了根据龙门双驱的横梁调整结构,应用于涂布机横梁调整。
22、与现有技术相比,本发明具有以下有益效果:
23、1、本发明提供了一种龙门双驱的横梁调整方法、结构及应用;该调整方法,方便对龙门双驱的横梁自动化便捷式,高精度调平,本发明利用至少一基准面的参照,对横梁两端进行实时测距,计算两者之间在垂直于横梁方向上的差值,逐渐将该差值调整至0,方便便捷精准调平;
24、2、本发明进一步在调整过程中补偿横梁轴向变形位移,使得横梁能够弹性形变的情况下,进行横梁两端竖向位移(垂直于横梁方向的)调整,如此调平得以顺利调整,避免调整幅度过大时可能形成的干涉。
技术特征:1.龙门双驱的横梁调整方法,其特征在于,包括
2.根据权利要求1所述的龙门双驱的横梁调整方法,其特征在于,δ调整至0的过程中,误差控制±5mm。
3.根据权利要求1所述的龙门双驱的横梁调整方法,其特征在于,δ调整至0时,横梁中部处于预起拱状态。
4.根据权利要求1所述的龙门双驱的横梁调整方法,其特征在于,横梁一端发生角位移和竖向位移,另一端发生角位移、竖向位移及轴向位移,该轴向位移用于补偿横梁两端上下移动过程中发生的轴向变形位移。
5.根据权利要求4所述的龙门双驱的横梁调整方法,其特征在于,横梁发生角位移和竖向位移的一端采用固定轴与龙门双驱的一驱动连接;
6.根据权利要求1所述的龙门双驱的横梁调整方法,其特征在于,通过若干激光测距sensor,实时检测龙门双驱的横梁两端距离基准面的距离,距离为若干激光测距sensor的加权平均值。
7.根据权利要求1所述的龙门双驱的横梁调整方法,其特征在于,δ调整至0的过程中采用线性变化。
8.一种龙门双驱的横梁调整结构,其特征在于,包括两竖向驱动、偏心轴连接件、固定轴连接件、机架、若干测距单元以及控制部;
9.根据权利要求8所述的龙门双驱的横梁调整结构,其特征在于,偏心轴连接件包括偏心轴和u型固定座;偏心轴中部具有偏心轴段,两端具有固定轴端;固定轴端的轴线与偏心轴段的轴线不共线,固定轴端铰接在u型固定座一侧的凹槽内,u型固定座的另一侧固定连接竖向驱动,横梁一端具有与偏心轴段适配的偏心轴孔;偏心轴段与横梁的偏心轴孔配合,使得横梁一端通过偏心轴连接件与竖向驱动连接;偏心轴孔内偏心轴段上安装有间隔环;u型固定座与横梁之间的固定轴端上安装用卡环。
10.一种根据权利要求8或9的龙门双驱的横梁调整结构,应用于涂布机横梁调整。
技术总结本发明公开了龙门双驱的横梁调整方法、结构及应用,本发明属于龙门机构技术领域,该龙门双驱的横梁调整方法,包括至少一基准面,该基准面为龙门双驱的横梁调整的参照;实时检测并获取龙门双驱的横梁两端距离基准面的距离,并计算两者在垂直于横梁方向上的差值为Δ;根据上述距离信息,龙门双驱的横梁两端受各自侧驱动上下调整,直至Δ为0。本发明通过上述设置,方便对龙门双驱的横梁自动化便捷式,高精度调平,本发明利用至少一基准面的参照,对横梁两端进行实时测距,计算两者之间在垂直于横梁方向上的差值,逐渐将该差值调整至0,方便便捷精准调平;本发明进一步在调整过程中补偿横梁两端位移,如此调平得以顺利调整。
技术研发人员:鲁男,徐国伟,何世祥,黄琦智,杨昊凡
受保护的技术使用者:深圳市克洛诺斯科技有限公司
技术研发日:技术公布日:2024/1/15