一种8字形膨胀波纹管移动焊接机器人及其设计方法
本发明属于焊接机器人,特别是涉及一种8字形膨胀波纹管移动焊接机器人及其设计方法。
背景技术:
1、在石油勘探行业,由于地下的特殊环境,长期服役的油井或气井管道会出现腐蚀泄露,给生产安全顺利输送油气带来了极大威胁。在引进国外固井维修技术之前,一旦油气井发生泄露,出于多方面考虑,该井眼就废弃不能再使用了。我国于21世纪初期引进了俄罗斯的膨胀波纹管维修固井技术,解决了我国油气井管道无法维修的技术难题。该技术采用挤压模具将一定规格的钢管挤压成统一规格的波纹管,在固井维修现场将两根或三根膨胀波纹管焊接为一柱,每柱起吊到钻井平台后,再将每柱焊接在一起形成数十、上百米的管串,最后通过打高压水、高压气或机械膨胀方式将挤压后的膨胀波纹管涨至原尺寸,膨胀后的管道紧贴原泄漏管道,从而实现了油气井的堵漏维修。
2、授权专利201020511548.x和申请专利201010268098.0公布了一种异形工件柔性焊接切割装置,实现了移动焊接机器人在膨胀波纹管异形截面上的焊接切割作业,但是所述的传动链条为单排链,轴向刚度偏低,焊接精度不足,且传动链条在传动过程中与环形导轨的壁面为滑动摩擦,摩擦力较大,链条磨损严重,需采用大功率驱动电机,成本较高且难以实现工程应用。
技术实现思路
1、本发明的目的在于提供一种8字形膨胀波纹管移动焊接机器人以解决现有技术中焊接机器人存在的传动链条轴向刚度偏低、摩擦力大的技术问题;本发明的目的还在于提供一种8字形膨胀波纹管移动焊接机器人设计方法。
2、本发明公布的8字形膨胀波纹管移动焊接机器人设计方法,解决了我国石油勘探领域深井固井无法实现高质量自动化焊接的技术瓶颈,为复杂异形截面焊缝自动化焊接机器人构型设计提供参考,可推广应用于其它领域同一平面内的复杂异形焊缝的自动化焊接设备的设计,为复杂工况下移动焊接机器人的结构设计提供新的解决方案,提升移动焊接机器人行业的设计水平和效率。
3、为了实现上述目的,本发明的一种8字形膨胀波纹管移动焊接机器人采用以下技术方案:
4、一种8字形膨胀波纹管移动焊接机器人,包括轮廓与8字形膨胀波纹管仿形轨道板上待焊接焊缝轮廓一致的仿形轨道板,所述仿形轨道板的表面靠内侧上开设有一圈凹槽,所述凹槽中安装有链条,所述凹槽的内壁上设置有凸台,所述凸台的位置与相应链条中滚子的位置对应以供所述滚子沿其滚动。
5、进一步地,所述链条为并联双排链,所述凹槽中设置有两圈所述凸台,两圈凸台的位置与并联双排链中相应滚子的位置对应。
6、本发明的一种8字形膨胀波纹管移动焊接机器人设计方法,采用以下技术方案:
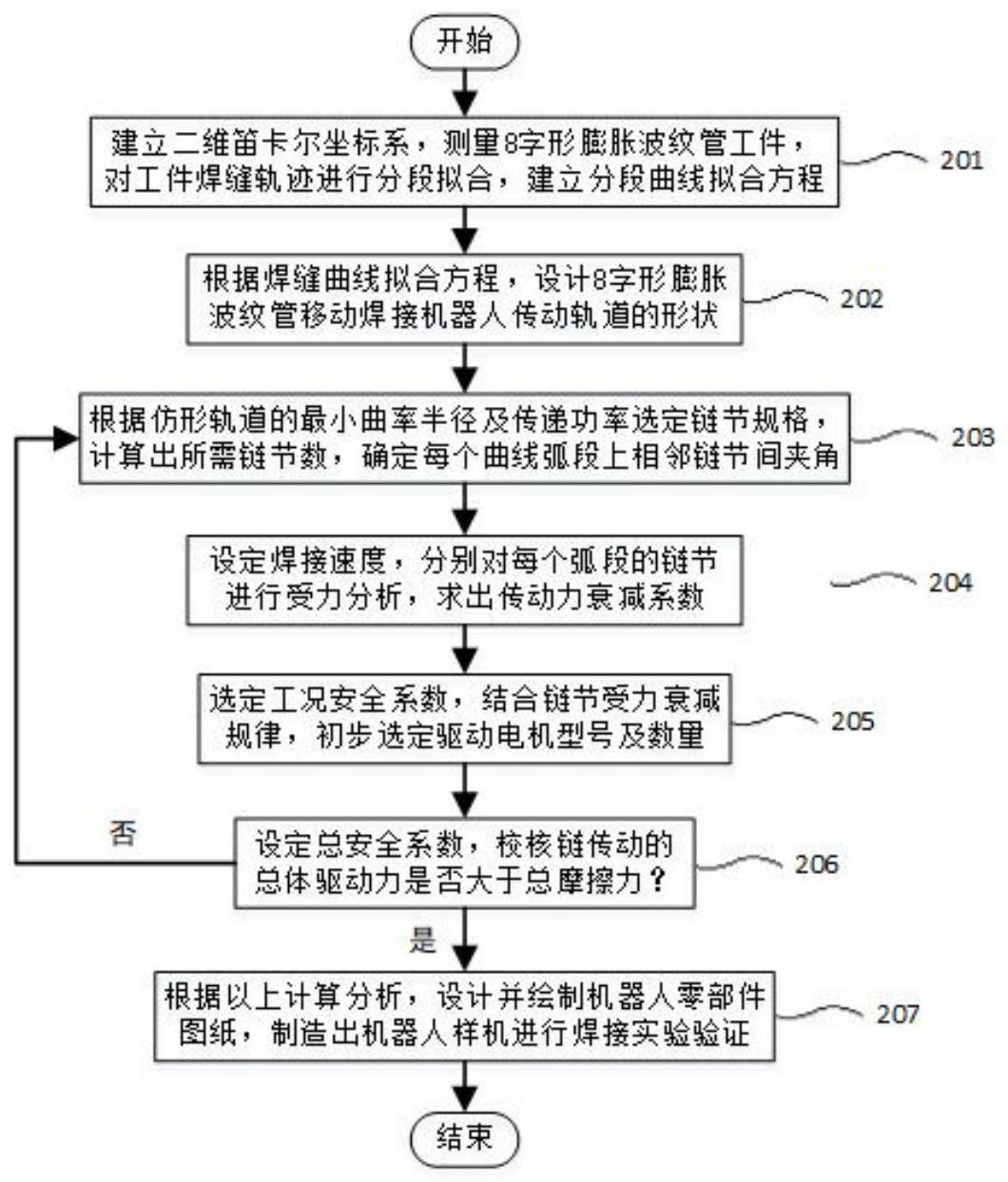
7、一种8字形膨胀波纹管移动焊接机器人设计方法,包括以下步骤:
8、步骤1:根据8字形膨胀波纹管工件外形尺寸,对工件焊缝轨迹进行分段拟合并建立焊缝曲线拟合方程;
9、步骤2:根据焊缝曲线拟合方程,设计8字形膨胀波纹管移动焊接机器人传动轨道的仿形轨道;
10、步骤3:根据仿形轨道的最小曲率半径选定链节规格,以保证链条节距小于仿形轨道的最小曲率,根据公式一计算出所需链节数量,并确定每个曲线弧段上相邻链节间的夹角β,公式一为式中lp为链节数量,l表示仿形轨道的总长度,p表示选定的链节距;
11、步骤4:设定焊接速度,对链节进行受力分析,根据公式二求出圆弧上传动力衰减系数α,公式二为μ为广义链传动摩擦系数,fn表示仿形轨道对传动链的支撑力;
12、步骤5:选择链轮齿数z和其尺寸,选择工况安全系数ka,根据公式三初步选定驱动电机型号及数量,公式三为n表示初步选定的驱动电机的数量,pd表示初步选定的驱动电机的实际功率;p表示链传动的额定功率;kz和km分别表示链轮齿数系数和多排链排数系数;
13、步骤6:根据公式四校核相同曲率的圆弧上链传动的传动力是否大于所受摩擦力,校核通过则进入步骤7,校核失败则进入步骤3重新选定链节规格,公式四为式中fn为第n节链节的传动力,f1为第1节链节的传动力;
14、步骤7:根据以上计算分析,设计并绘制机器人零部件图纸,制造出机器人样机,进行焊接实验验证。
15、进一步地,在所述步骤1中,以8字形膨胀波纹管形心为原点,建立二维笛卡尔坐标系并基于此测量8字形膨胀波纹管工件外形尺寸。
16、进一步地,在所述步骤2中,设计仿形轨道时,应该以传动轨道的中心轮廓轨迹与建立的焊缝曲线拟合方程一致为原则,传动轨道的外轮廓轨迹和内轮廓轨迹以中心轮廓轨迹向外、向内偏移而形成。
17、进一步地,在所述步骤3中选定链节规格时,优先选用双排传动链和节距小的链节。
18、进一步地,在所述步骤4中,取n≥2,fn取链传动预紧力的1.4-1.6倍。
19、进一步地,在所述步骤4中,取ka=3,km=1.7。
20、本发明与现有技术相比的优点在于:克服现有技术的不足,提出一种8字形膨胀波纹管移动焊接机器人设计方法,明确了设计步骤及核心设计公式,提高了石油勘探领域固井维修用膨胀波纹管焊接机器人的设计效率。此外,本发明设计的移动焊接机器人相较于现有方案进行了优化和改进,采用高刚度的双排链传动方式,变滑动摩擦为滚动摩擦,极大提升了移动焊接机器人的实际工程应用能力,并且将该移动焊接机器人的设计过程模块化,为复杂异形截面焊缝自动化焊接机器人构型设计提供参考,可推广应用于其它领域同一平面内的复杂异形焊缝的自动化焊接设备的设计,为复杂工况下移动焊接机器人的结构设计提供新的解决方案。
技术特征:
1.一种8字形膨胀波纹管移动焊接机器人,包括轮廓与8字形膨胀波纹管仿形轨道板上待焊接焊缝轮廓一致的仿形轨道板,其特征在于:所述仿形轨道板的表面靠内侧上开设有一圈凹槽,所述凹槽中安装有链条,所述凹槽的内壁上设置有凸台,所述凸台的位置与相应链条中滚子的位置对应以供所述滚子沿其滚动。
2.根据权利要求1所述的一种8字形膨胀波纹管移动焊接机器人,其特征在于:所述链条为并联双排链,所述凹槽中设置有两圈所述凸台,两圈凸台的位置与并联双排链中相应滚子的位置对应。
3.一种8字形膨胀波纹管移动焊接机器人设计方法,包括以下步骤:
4.根据权利要求3所述的一种8字形膨胀波纹管移动焊接机器人设计方法,其特征在于,在所述步骤1中,以8字形膨胀波纹管形心为原点,建立二维笛卡尔坐标系并基于此测量8字形膨胀波纹管工件外形尺寸。
5.根据权利要求3所述的一种8字形膨胀波纹管移动焊接机器人设计方法,其特征在于,在所述步骤2中,设计仿形轨道时,应该以传动轨道的中心轮廓轨迹与建立的焊缝曲线拟合方程一致为原则,传动轨道的外轮廓轨迹和内轮廓轨迹以中心轮廓轨迹向外、向内偏移而形成。
6.根据权利要求4所述的一种8字形膨胀波纹管移动焊接机器人设计方法,其特征在于,在所述步骤3中选定链节规格时,优先选用双排传动链和节距小的链节。
7.根据权利要求3所述的一种8字形膨胀波纹管移动焊接机器人设计方法,其特征在于,在所述步骤4中,取n≥2,fn取链传动预紧力的1.4-1.6倍。
8.根据权利要求3所述的一种8字形膨胀波纹管移动焊接机器人设计方法,其特征在于,在所述步骤4中,取ka=3,km=1.7。
技术总结
本发明公开一种8字形膨胀波纹管移动焊接机器人及其设计方法,具体包括:建立膨胀波纹管焊缝曲线拟合方程;设计仿形轨道;选定传动链规格,分别计算各分段轨道上相邻链节间夹角;求出各分段链传动力衰减系数;选定驱动电机型号及数量;加工出样机进行实验验证。本发明提高了石油勘探领域膨胀波纹管的焊接质量和效率,解决了我国石油勘探领域深井固井无法实现高质量自动化焊接的技术瓶颈,为复杂异形截面焊缝自动化焊接机器人构型设计提供参考,可推广应用于其它领域同一平面内的复杂异形焊缝的自动化焊接,为复杂工况下移动焊接机器人的结构设计提供新的解决方案。
技术研发人员:薛龙,邹勇,梁亚军,黄军芬,黄继强,姚舒晏,曹莹瑜
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!