板材切割装置及方法与流程
本发明涉及板材切割领域,特别涉及一种板材切割装置及方法。
背景技术:
1、车辆、船舶以及工程机械的主体框架都是由各种各样的工件焊接完成,而这些工件主要由板材切割而成。板材切割后会通过输送线运行至下一个区域进行机器人自动分拣,即机器人自动抓取切割板材上零件。但是,板材在切割过程中,由于切割可能没有切透、分拣台面不平整等,板材的部分区域由于得不到支撑或出现部分下陷,部分翘起和边框压工件等情况,会影响后续的分拣。如何对其进行改善,是本领域亟待解决的技术问题。
技术实现思路
1、本发明的主要目的是提出一种板材切割装置,旨在解决现有技术中板材在切割后边框及工件出现移位和翘起的问题。
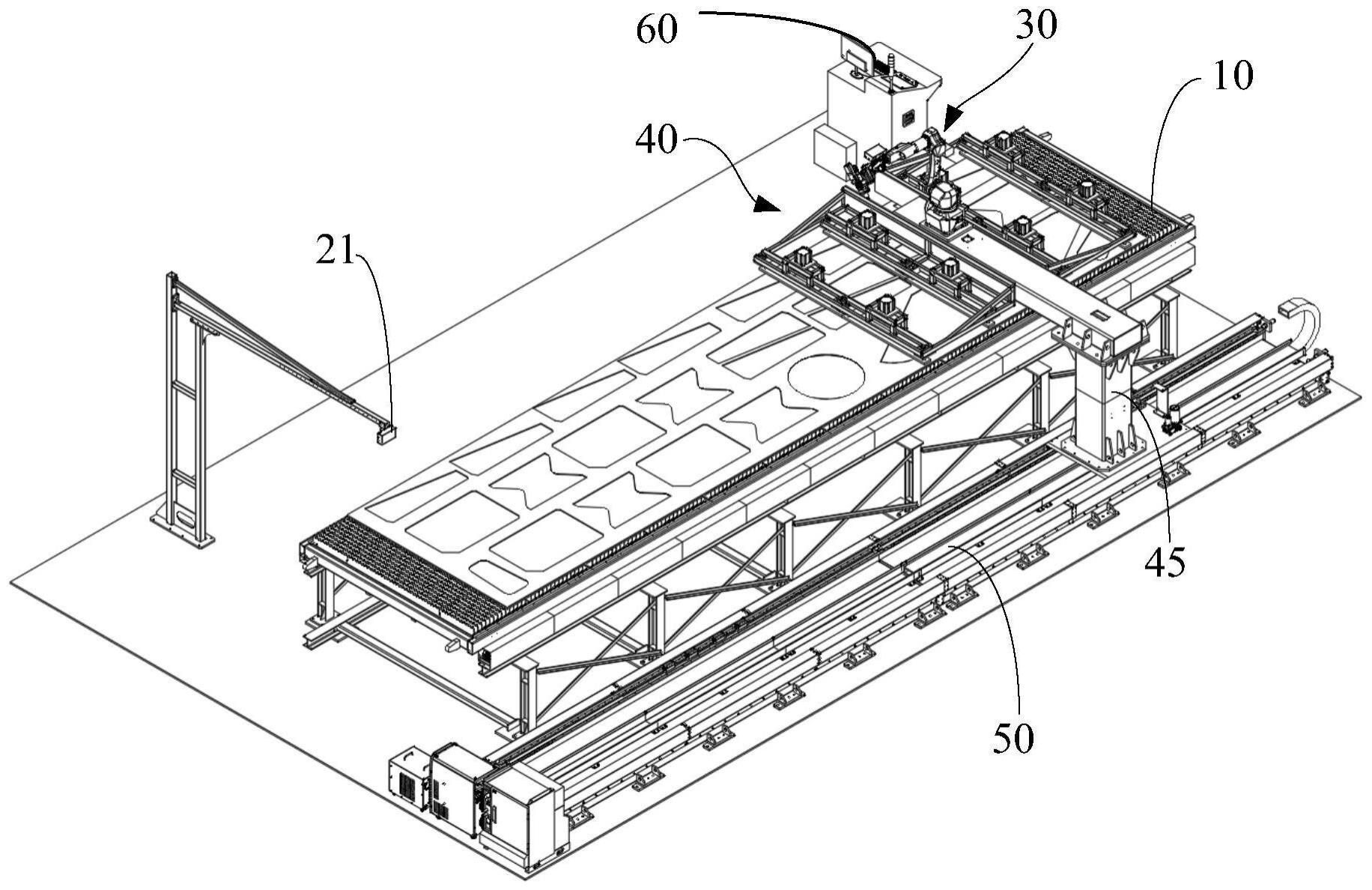
2、为实现上述目的,本发明提出一种板材切割装置,包括:
3、机台,用于放置板材;
4、定位组件,用于获取工件的位置;
5、切割机构,包括第一驱动组件以及与所述第一驱动组件连接的切割嘴;
6、固定机构,设置在所述机台一侧,用于固定所述机台上的板材;
7、第二驱动组件,用于驱动上述固定机构沿着所述机台运动;
8、控制模块,用于与所述定位组件、切割机构以及固定机构电连接。
9、在一些实施例中,所述固定机构包括:
10、安装架,设置在所述机台的上方;
11、第三驱动组件,设置在所述安装架上;
12、覆压件,设置在所述第三驱动组件的移动端,所述第三驱动组件用于驱动所述覆压件朝向或背离所述机台运动。
13、在一些实施例中,所述板材切割装置还包括:
14、梁架,设置在所述第二驱动组件的移动端,用于安装所述安装架和所述第一驱动组件;沿着所述机台的长度方向,所述梁架的两侧分别设置有所述固定机构。
15、在一些实施例中,所述定位组件包括设置在所述机台一侧的第一相机以及设置在所述第一驱动组件的移动端的第二相机。
16、在一些实施例中,所述板材切割装置还包括设置在所述切割嘴一侧的测距传感器,以及连接所述切割嘴以及所述第一驱动组件的第四驱动组件。
17、在一些实施例中,所述第三驱动组件包括设置在所述安装架四角处的气缸,所述覆压件包括连接相邻两气缸的推杆的压条。
18、本申请还提出一种板材切割方法,应用于上述的板材切割装置;所述板材切割方法包括以下步骤:
19、对套料图进行规划,生成切割图档;
20、获取板材的第一图像信息,并根据第一图像信息及套料图获取板材的位置信息;
21、控制固定机构运动至板材上方,并对板材进行固定;
22、控制切割机构对板材进行切断加工。
23、在一些实施例中,所述控制切割机构对板材进行切断加工前还包括以下步骤:
24、控制所述第一驱动组件运动,以对加工区域进行扫描以获取第二图像信息;
25、根据所述第二图像信息、板材的位置信息以及切割图档生成切割程序。
26、在一些实施例中,所述控制切割机构对板材进行切断加工还包括以下步骤:获取板材与切割嘴之间的距离信息,根据距离信息控制切割嘴的高度。
27、在一些实施例中,所述对加工区域进行扫描以获取第二图像信息前还包括以下步骤:根据板材的位置信息,以及所述固定机构的位置信息规划扫描轨迹。
28、本申请实施例中,板材切割装置包括机台、定位组件、切割机构、固定机构、第二驱动组件以及控制模块,定位组件用于获取工件的位置;切割机构包括第一驱动组件以及与所述第一驱动组件连接的切割嘴;固定机构用于固定所述机台上的板材;第二驱动组件用于驱动上述固定机构沿着所述机台运动,控制模块可根据定位组件获取的板材的实际位置信息,并控制固定机构运动至加工区域的上方以对板材进行覆压固定,随后控制切割机构对边框区域进行切断加工,同时固定机构能避免切断加工时板材边框发生翘起。边框在切割完后与工件完全分离,避免在分拣阶段工件卡在边框中无法取出的问题。
技术特征:
1.一种板材切割装置,其特征在于,包括:
2.根据权利要求1所述的板材切割装置,其特征在于,所述固定机构包括:
3.根据权利要求2所述的板材切割装置,其特征在于,所述板材切割装置还包括:
4.根据权利要求1中任一项所述的板材切割装置,其特征在于,所述定位组件包括设置在所述机台一侧的第一相机以及设置在所述第一驱动组件的移动端的第二相机。
5.根据权利要求1~4中任一项所述的板材切割装置,其特征在于,所述板材切割装置还包括设置在所述切割嘴一侧的测距传感器,以及连接所述切割嘴以及所述第一驱动组件的第四驱动组件。
6.根据权利要求2所述的板材切割装置,其特征在于,所述第三驱动组件包括靠近所述安装架四角设置的气缸,所述覆压件包括连接相邻两气缸的推杆的压条。
7.一种板材切割方法,其特征在于,应用于权利要求1~6中任一项所述的板材切割装置,所述板材切割方法包括以下步骤:
8.根据权利要求7所述的板材切割方法,其特征在于,所述控制切割机构对板材进行切断加工前还包括以下步骤:
9.根据权利要求8所述的板材切割方法,其特征在于,所述控制切割机构对板材进行切断加工还包括以下步骤:
10.根据权利要求8所述的板材切割方法,其特征在于,所述对加工区域进行扫描以获取第二图像信息前还包括以下步骤:
技术总结
本发明公开一种板材切割装置及方法,该板材切割装置包括机台、定位组件、切割机构、固定机构、第二驱动组件以及控制模块,定位组件用于获取工件的位置;切割机构包括第一驱动组件以及与所述第一驱动组件连接的切割嘴;固定机构用于固定所述机台上的板材;第二驱动组件用于驱动上述固定机构沿着所述机台运动,控制模块可根据定位组件获取的板材的实际位置信息,并控制固定机构运动至加工区域的上方以对板材进行覆压固定,随后控制切割机构对加工区域进行切断加工,避免切断加工时板材发生翘起。边框在切割完后与工件完全分离,避免在分拣阶段工件卡在边框中无法取出的问题。
技术研发人员:石求发,刘湘程,彭飞
受保护的技术使用者:湖南视比特机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!