焊接设备及工件的焊接方法与流程
本发明涉及焊接设备,尤其涉及一种焊接设备及工件的焊接方法。
背景技术:
1、现有技术中,对带有多道焊缝的工件进行焊接时,若在同一个焊接专机上焊接,则每焊完一道焊缝后需由人工吊运翻转工件,需要在焊接专机上重新固定后才能进行下一道焊缝的焊接,每道焊缝焊接之前均需要调节焊枪的高度和位置,以及调节工件的位置,影响了工件的生产效率;若在多个焊接专机上焊接,可以在多个焊接专机上对工件上的多道焊缝分别进行焊接,可以缩短焊接时间,但是每焊完一道焊缝后均需要把工件人工吊运至另一个焊接专机上,增大了劳动强度,且需要重新对工件进行定位,致使工件的生产效率得不到提升。
技术实现思路
1、本发明提供一种焊接设备及工件的焊接方法,用以解决现有技术中无论是利用一个焊接专机还是多个焊接专机对带有多道焊缝的工件进行焊接时均需要人工吊运工件和存在对工件重新定位的操作,造成工件的焊接时间长,工件的生产效率低的缺陷。
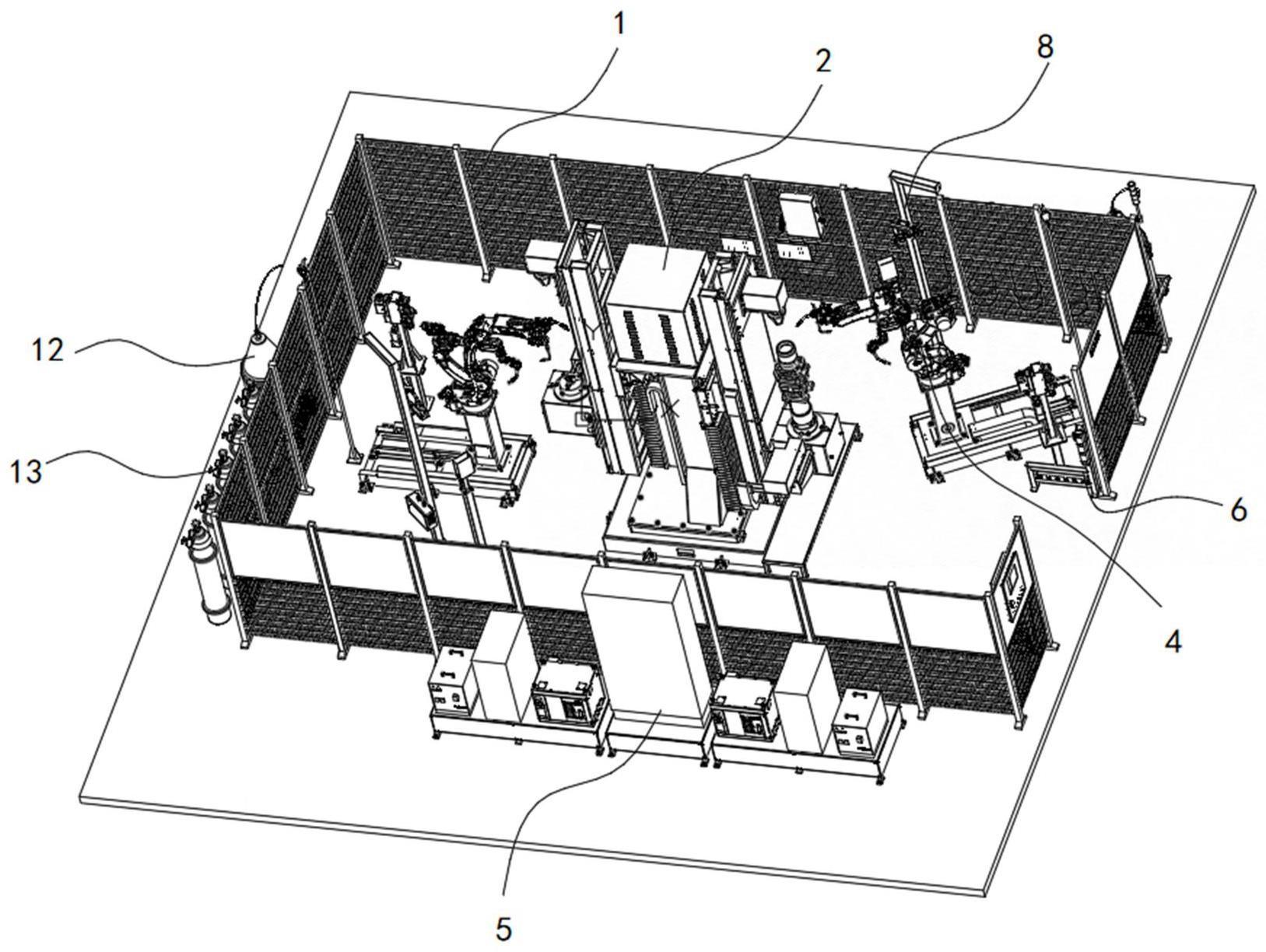
2、本发明提供一种焊接设备,包括:
3、变位机,包括至少两个工作台和至少两个位置调节机构,所述工作台用于固定工件,各个所述位置调节机构分别用于调节各个所述工作台的高度和水平角度;
4、至少两个焊接机器人,分别设置在至少两个工作位处,各个所述工作台分别与各个所述工作位相对设置,且各个所述焊接机器人分别用于焊接所述工作台上的工件的焊缝;
5、控制系统,与所述位置调节机构和所述焊接机器人通信连接,所述控制系统用于控制所述位置调节机构调节所述工作台的高度和水平角度;且所述控制系统用于控制所述焊接机器人移动至第一位置处并对所述工件的焊缝进行焊接。
6、根据本发明提供的一种焊接设备,还包括:
7、回转机构,用于驱动所述变位机回转,所述回转机构与所述控制系统通信连接,所述控制系统配置为:在所述焊接机器人移动至第二位置处时,控制所述回转机构驱动所述变位机回转,以使所述工作台能够在各个所述工作位之间移动。
8、根据本发明提供的一种焊接设备,所述位置调节机构包括:
9、旋转机构,用于驱动所述工作台旋转,以调节所述工件的水平角度;
10、升降机构,用于驱动所述工作台升降,以调节所述工件的高度。
11、根据本发明提供的一种焊接设备,所述变位机还包括至少两个用于固定所述工件的固定机构,所述固定机构包括:
12、卡盘,设置在所述工作台上,所述卡盘用于与所述工件的底端接触;
13、尾顶,设置于所述卡盘的上方,且所述尾顶滑动设置于所述变位机上,所述尾顶用于与所述工件接触或伸入所述工件的顶端内;
14、移动驱动件,用于驱动所述尾顶靠近或远离所述卡盘。
15、根据本发明提供的一种焊接设备,还包括用于驱动所述焊接机器人移动的滑台,所述滑台包括:
16、导轨;
17、支撑座,滑动设置于所述导轨上,所述焊接机器人设置于所述支撑座上;
18、驱动件,用于驱动所述支撑座沿所述导轨滑动。
19、根据本发明提供的一种焊接设备,还包括加热枪,所述加热枪用于预热所述工件;所述焊接机器人还包括夹具,所述夹具用于夹持所述加热枪。
20、根据本发明提供的一种焊接设备,所述加热枪上设置有温度检测元件,所述温度检测元件用于检测所述工件的温度。
21、根据本发明提供的一种焊接设备,所述变位机还包括:
22、卡盘锁紧装置,所述卡盘锁紧装置的驱动端用于与所述卡盘的锁紧孔对接;
23、滑动装置,用于驱动所述卡盘锁紧装置靠近或远离所述卡盘。
24、本发明还提供的一种工件的焊接方法,基于上述任意一项所述的焊接设备,包括:
25、获取工件固定在工作台上的信号;
26、控制位置调节机构将所述工作台调节到预设高度和预设水平角度;
27、控制焊接机器人移动至第一位置,并焊接所述工件的焊缝。
28、根据本发明提供的一种工件的焊接方法,还包括:
29、获取所述焊接机器人对所述工件的部分焊缝焊接完成的信号;
30、控制所述焊接机器人移动至第二位置;
31、控制回转机构驱动变位机回转,使所述工作台在各个工作位之间移动;
32、控制所述焊接机器人移动至第一位置,并对所述工件的其余焊缝进行焊接
33、本发明提供的焊接设备及工件的焊接方法,焊接设备包括变位机、至少两个焊接机器人和控制系统,变位机包括至少两个工作台和至少两个位置调节机构,工作台用于固定工件,并且各个位置调节机构可以分别用于调节工作台的高度和水平角度,焊接设备包括至少两个工作位,各个焊接机器人分别设置在各个工作位处,各个工作台分别与各个工作位相对应设置,各个焊接机器人分别用于焊接工作台上的工件的焊缝。控制系统与位置调节机构和焊接机器人通信连接,控制系统用于控制位置调节机构调节工作台的高度和水平角度,以便于焊接机器人对其焊缝进行焊接;控制系统用于控制焊接机器人移动至第一位置处,并对工件的焊缝进行焊接。
34、如此设置,通过焊接设备的控制系统对变位机的位置调节机构的控制,可以实现对工件位置的自动调节,在对带有多道焊缝进行焊接时,在每焊完一道焊缝后无需通过人工吊运翻转工件,无需重新对工件进行定位,且无需将工件吊运至另一个焊接专机上,减少了人工的参与,降低了人工劳动强度,提高了工件的焊接效率;并且,通过至少两个焊接机器人分别对至少两个工件的焊缝同时焊接,可以进一步地提高了焊接效率,从而提高了工件的生产效率。
技术特征:
1.一种焊接设备,其特征在于,包括:
2.根据权利要求1所述的焊接设备,其特征在于,还包括:
3.根据权利要求1所述的焊接设备,其特征在于,所述位置调节机构包括:
4.根据权利要求1所述的焊接设备,其特征在于,所述变位机还包括至少两个用于固定所述工件的固定机构,所述固定机构包括:
5.根据权利要求1所述的焊接设备,其特征在于,还包括用于驱动所述焊接机器人移动的滑台,所述滑台包括:
6.根据权利要求1所述的焊接设备,其特征在于,还包括加热枪,所述加热枪用于预热所述工件;所述焊接机器人还包括夹具,所述夹具用于夹持所述加热枪。
7.根据权利要求6所述的焊接设备,其特征在于,所述加热枪上设置有温度检测元件,所述温度检测元件用于检测所述工件的温度。
8.根据权利要求4所述的焊接设备,其特征在于,所述变位机还包括:
9.一种工件的焊接方法,其特征在于,基于权利要求1-8任意一项所述的焊接设备,包括:
10.根据权利要求9所述的工件的焊接方法,其特征在于,还包括:
技术总结
本发明涉及焊接设备技术领域,提供一种焊接设备及工件的焊接方法,焊接设备包括变位机、至少两个焊接机器人和控制系统,变位机包括至少两个工作台和至少两个位置调节机构,工作台用于固定工件,各个位置调节机构分别用于调节各个工作台的高度和水平角度;至少两个焊接机器人分别设在至少两个工作位处,各个工作台分别与各个工作位相对设置,各个焊接机器人分别用于焊接工作台上的工件的焊缝;控制系统用于控制位置调节机构调节工作台的高度和水平角度;控制系统用于控制焊接机器人移动至第一位置并对工件的焊缝进行焊接。可实现对工件位置的自动调节,降低劳动强度,通过至少两个焊接机器人分别对至少两个工件的焊缝同时焊接,提高了焊接效率。
技术研发人员:邓绍振,李才,钟海江
受保护的技术使用者:娄底市中兴液压件有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!