一种中小组立机器人智能焊接装置及方法与流程
本发明涉及机器人智能焊接,尤其涉及一种中小组立机器人智能焊接装置及方法。
背景技术:
1、在现代中小组立机器人智能焊接领域中,各类中小组立板材样式繁多,焊接需求多,如何安全、高效以及高精度的去同步焊接多块中小组立板材一直是此领域研究的热门话题。
2、传统的中小组立机器人装置焊接单次只能焊接同一类型的单块型材,并且对于曲面板的焊接精度极低,焊接质量无法保证,焊接效果差,这种焊接方式不仅低效、成本高,也限制了中小组立的智能化生产。
技术实现思路
1、本发明的目的是提供一种中小组立机器人智能焊接装置及方法。
2、为了实现上述目的,本发明的技术方案是:
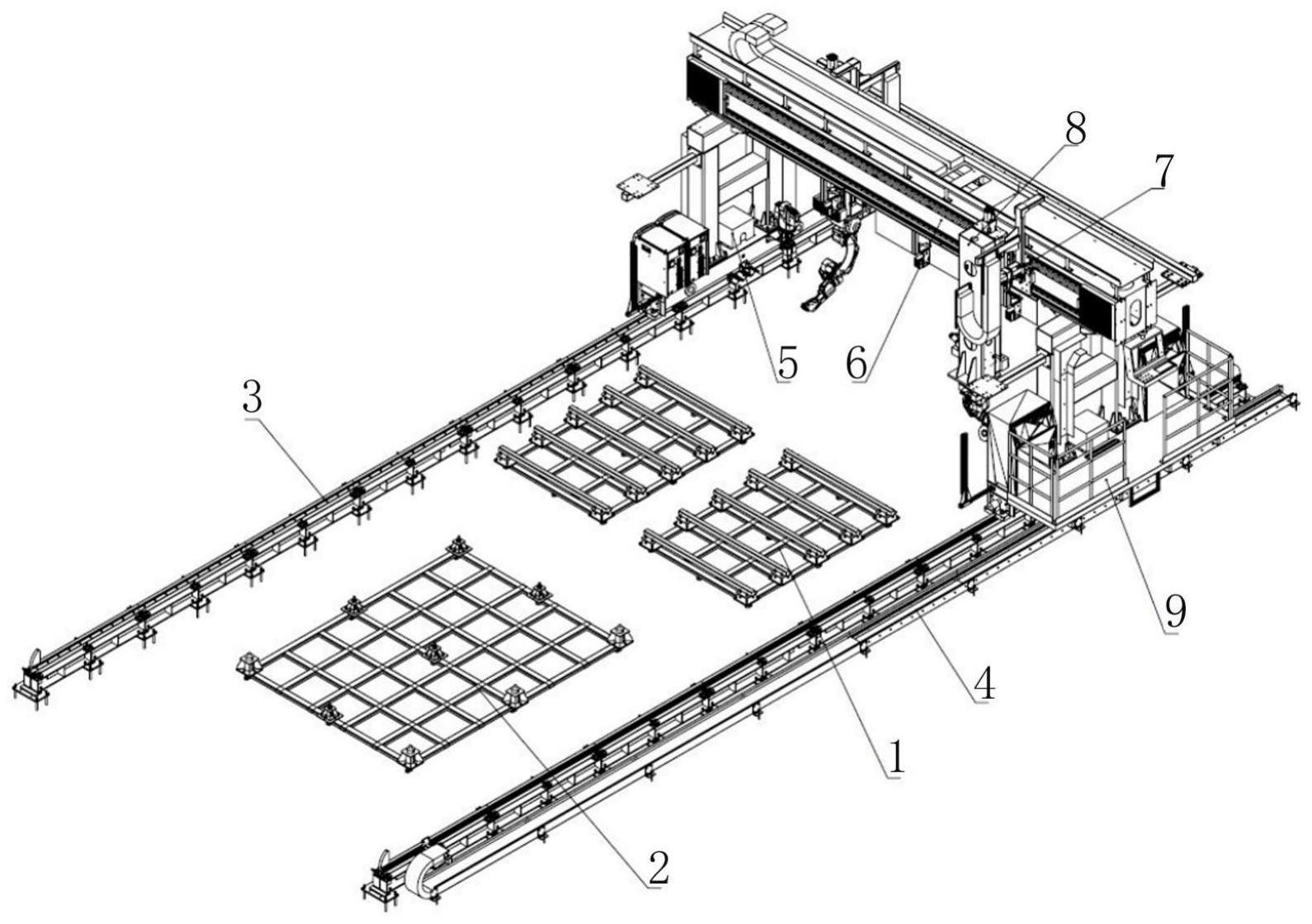
3、中小组立机器人智能焊接装置,其特征在于,包括第一定位装置、第二定位装置、地面轨道、地面拖链、行走底架、焊接门架横梁、焊接门架横向小车、升降装置和设备平台;
4、所述第一定位装置、第二定位装置、地面轨道、地面拖链固定在地面上,两条地面轨道沿前后方向平行布置,两条地面轨道之间设有两个第一定位装置和一个第二定位装置,
5、两个行走底架通过电机驱动齿轮齿条啮合分别沿两条地面轨道运动,所述设备平台与行走底架固定连接并跟随行走底架同步运动,所述焊接门架横梁沿左右方向横跨两个行走底架的上端并固定,两个焊接门架横向小车通过电机驱动斜齿轮与焊接门架横梁上的斜齿条啮合,两个焊接门架横向小车分别在焊接门架横梁的前后两侧沿左右方向移动,两个升降装置分别与焊接门架横向小车固定连接,所述升降装置由电机减速机驱动丝杆以带动垂直方向运动,所述升降装置的底部设有焊接机器人。
6、进一步地,所述第一定位装置包括底部支撑框架,所述底部支撑框架两侧的上端设有地脚,所述地脚通过调节螺栓沿垂直方向高度可调,两侧的地脚之间通过定位支架连接,所述底部支撑框架的下端设有第一福马轮,所述底部支撑框架通过第一福马轮在水平方向移动。
7、进一步地,所述第二定位装置包括底部框架,所述底部框架的上端设有大行程升降平台和小行程升降平台,所述底部框架的下端设有第二福马轮,所述底部框架通过第二福马轮在水平方向移动。
8、进一步地,所述地面轨道包括地梁,所述地梁的上端固定设有带齿条轨道组,所述带齿条轨道组通过斜齿条传动,所述地梁的下端设有沉梁地脚板,所述地梁上端的两侧设有限位块,所述地面轨道设有检测板材到位的轨道传感器。
9、进一步地,所述行走底架包括底架,所述底架的下端设有行走轮和门架驱动电机,所述底架下端的两侧设有导向轮,所述底架的一侧设有安全光栅,所述底架的内侧固定设有剪丝机支撑座,所述剪丝机支撑座的上端设有清枪剪丝机构,所述门架驱动电机通过底架斜齿轮与地面轨道的斜齿条配合驱动行走轮。
10、进一步地,所述焊接门架横梁包括横梁主体,所述横梁主体设有横梁斜齿条,所述横梁主体的上端设有焊接门架拖链支架,所述横梁主体的一端设有横梁限位块,所述横梁主体的两端设有防护安装板,所述横梁主体的下端设有若干线激光传感器,线激光传感器沿横梁主体的长度方向间隔设置。
11、进一步地,所述焊接门架横向小车包括横向驱动电机,所述横向驱动电机固定于横向滑板下部的一侧,所述横向滑板下部的另一侧设有毛毡斜齿轮,所述横向驱动电机驱动毛毡斜齿轮,所述横向驱动电机通过毛毡斜齿轮与横梁斜齿条配合,所述横向滑板上部的一侧设有横向拖链支架。
12、进一步地,所述升降装置包括电机减速机和丝杆,所述丝杆沿竖向设置在升降立柱体内,沿丝杆设有升降滑板,所述丝杆通过电机减速机驱动为升降滑板提供动力,所述升降滑板通过螺栓固定于横梁主体上,所述升降立柱体的底部设有焊接机器人。
13、进一步地,所述设备平台包括平台主体,所述平台主体的下端设有平台支架,所述平台主体的上端设有护栏安装板,所述护栏安装板的上端设有护栏,所述设备平台还设有垂直爬梯。
14、一种中小组立机器人智能焊接方法,其特征在于,包括以下步骤:
15、步骤s1)地面轨道的轨道传感器感应到上一工位输送过来的中小组立板材,将到位信号反馈给行走底架的门架驱动电机;
16、步骤s2)门架驱动电机驱动行走轮在地面轨道上从原点带着焊接门架横梁、焊接门架横向小车、升降装置以及设备平台向前运动,靠近中小组立板材焊接位置;
17、步骤s3)线激光传感器对工件轮廓进行扫描,确认焊接位置,将位置信息反馈给门架驱动电机和升降装置的电机减速机,对中小组立板材焊接位置进行微调,确保工件的具体焊接位置,并把信号反馈给焊接机器人;
18、步骤s4)两侧的焊接门架横向小车在横向驱动电机驱动下在横梁主体上水平运动,两侧升降装置的电机减速机收到反馈信号后驱动丝杆,丝杆带动升降滑板往下移动至中小组立焊接板材的既定位置;
19、步骤s5)线激光传感器扫描精确焊缝位置并反馈给焊接机器人,焊接机器人协同焊枪精准调整位置并开始焊接对位,对位完成后,两侧的焊枪同时对不同类型的中小组立板材进行焊接;
20、步骤s6)中小组立板材焊接完成后,焊接机器人的机械臂收缩,升降滑板上升,随焊接门架横向小车一起水平移动至清枪剪丝机构中,进行自清洁;
21、步骤s7)清洁完成后,行走底架带着焊接门架横梁、焊接门架横向小车、升降装置和设备平台组件退回至原点,升降装置上升至原点,焊接完成后的中小组立型材输送至下一工位。
22、本发明可实现两块中小组立板材的智能同步焊接,适用于多种样件定位放置,高度以及水平方向的三自由度可调,提高焊接效率,节约焊接周期;线激光非线性安装设计,覆盖区域广泛,针对不同高度和宽度的中小组立焊接件都可以发挥性能;
23、本发明既适用于单块中小组立平面板和曲面板的焊接,也适用于两块中小组立平面板和曲面板同步焊接,同时适用于多款不同类型的中小组立板材,适用范围广泛;
24、本发明通过齿轮齿条结合驱动,辅以润滑系统和防护装置,操作环境更安全。
技术特征:
1.一种中小组立机器人智能焊接装置,其特征在于,包括第一定位装置、第二定位装置、地面轨道、地面拖链、行走底架、焊接门架横梁、焊接门架横向小车、升降装置和设备平台;
2.根据权利要求1的中小组立机器人智能焊接装置,其特征在于,所述第一定位装置包括底部支撑框架,所述底部支撑框架两侧的上端设有地脚,所述地脚通过调节螺栓沿垂直方向高度可调,两侧的地脚之间通过定位支架连接,所述底部支撑框架的下端设有第一福马轮,所述底部支撑框架通过第一福马轮在水平方向移动。
3.根据权利要求1的中小组立机器人智能焊接装置,其特征在于,所述第二定位装置包括底部框架,所述底部框架的上端设有大行程升降平台和小行程升降平台,所述底部框架的下端设有第二福马轮,所述底部框架通过第二福马轮在水平方向移动。
4.根据权利要求1的中小组立机器人智能焊接装置,其特征在于,所述地面轨道包括地梁,所述地梁的上端固定设有带齿条轨道组,所述带齿条轨道组通过斜齿条传动,所述地梁的下端设有沉梁地脚板,所述地梁上端的两侧设有限位块,所述地面轨道设有检测板材到位的轨道传感器。
5.根据权利要求4的中小组立机器人智能焊接装置,其特征在于,所述行走底架包括底架,所述底架的下端设有行走轮和门架驱动电机,所述底架下端的两侧设有导向轮,所述底架的一侧设有安全光栅,所述底架的内侧固定设有剪丝机支撑座,所述剪丝机支撑座的上端设有清枪剪丝机构,所述门架驱动电机通过底架斜齿轮与地面轨道的斜齿条配合驱动行走轮。
6.根据权利要求5的中小组立机器人智能焊接装置,其特征在于,所述焊接门架横梁包括横梁主体,所述横梁主体设有横梁斜齿条,所述横梁主体的上端设有焊接门架拖链支架,所述横梁主体的一端设有横梁限位块,所述横梁主体的两端设有防护安装板,所述横梁主体的下端设有若干线激光传感器,线激光传感器沿横梁主体的长度方向间隔设置。
7.根据权利要求6的中小组立机器人智能焊接装置,其特征在于,所述焊接门架横向小车包括横向驱动电机,所述横向驱动电机固定于横向滑板下部的一侧,所述横向滑板下部的另一侧设有毛毡斜齿轮,所述横向驱动电机驱动毛毡斜齿轮,所述横向驱动电机通过毛毡斜齿轮与横梁斜齿条配合,所述横向滑板上部的一侧设有横向拖链支架。
8.根据权利要求6的中小组立机器人智能焊接装置,其特征在于,所述升降装置包括电机减速机和丝杆,所述丝杆沿竖向设置在升降立柱体内,沿丝杆设有升降滑板,所述丝杆通过电机减速机驱动为升降滑板提供动力,所述升降滑板通过螺栓固定于横梁主体上,所述升降立柱体的底部设有焊接机器人。
9.根据权利要求1的中小组立机器人智能焊接装置,其特征在于,所述设备平台包括平台主体,所述平台主体的下端设有平台支架,所述平台主体的上端设有护栏安装板,所述护栏安装板的上端设有护栏,所述设备平台还设有垂直爬梯。
10.一种中小组立机器人智能焊接方法,其特征在于,包括以下步骤:
技术总结
本发明提供一种中小组立机器人智能焊接装置及方法,两条地面轨道平行布置,两个行走底架通过电机驱动齿轮齿条啮合沿两条地面轨道运动,设备平台与行走底架固定连接并跟随行走底架同步运动,焊接门架横梁横跨两个行走底架的上端并固定,两个焊接门架横向小车通过电机驱动斜齿轮与焊接门架横梁上的斜齿条啮合,两个焊接门架横向小车分别在焊接门架横梁的前后两侧沿左右方向移动,两个升降装置分别与焊接门架横向小车固定连接,升降装置由电机减速机驱动丝杆以带动垂直方向运动,升降装置的底部设有焊接机器人;本发明可实现两块中小组立板材的智能同步焊接,适用于多种样件定位放置,高度以及水平方向的三自由度可调,提高焊接效率,节约焊接周期。
技术研发人员:郁榴华,潘慧君,顾胜,沈鹏,缪逢吉,甘露,刘营
受保护的技术使用者:上海船舶工艺研究所(中国船舶集团有限公司第十一研究所)
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!