一种基于焊接机器人的风扇网罩半自动化焊接平台的制作方法
本发明涉及自动化焊接设备领域,尤其涉及一种基于焊接机器人的风扇网罩半自动化焊接平台。
背景技术:
1、随着焊接机器人在焊接领域的大量应用,其在批量焊接标准化程度以及焊接产品质量方面相较传统人工焊接具备较大优势,但是其在产量和不同种类的产品柔性兼容方面仍难以满足工厂批量生产要求,特别是在国内电风扇网罩的焊接领域,因风扇网罩焊接前需先进行钢筋盘条的机械盘卷及螺旋定位,且钢筋盘条具有一定的柔韧性,其在定位精度等方面要求较高,因此尚无法采用焊接机器人全部自动化地焊接加工。
2、现有的电风扇网罩焊接多采用人工定位及人工焊接方式,在焊接过程需要2人或多人配合多时才能实施,速度慢、效率低,焊接质量不可控。
3、综上,如何设计一种半自动化平台,降低人员劳动强度,充分利用人员定位以及机器人焊接的优势,以提高焊接质量及焊接效率,便成为本领域人员亟待解决的技术问题。
技术实现思路
1、本发明的目的在于,解决现有技术的不足之处,提出一种基于焊接机器人的风扇网罩半自动化焊接平台,该焊接平台能够有效降低焊接劳动强度,提高焊接效率,保证焊接质量。
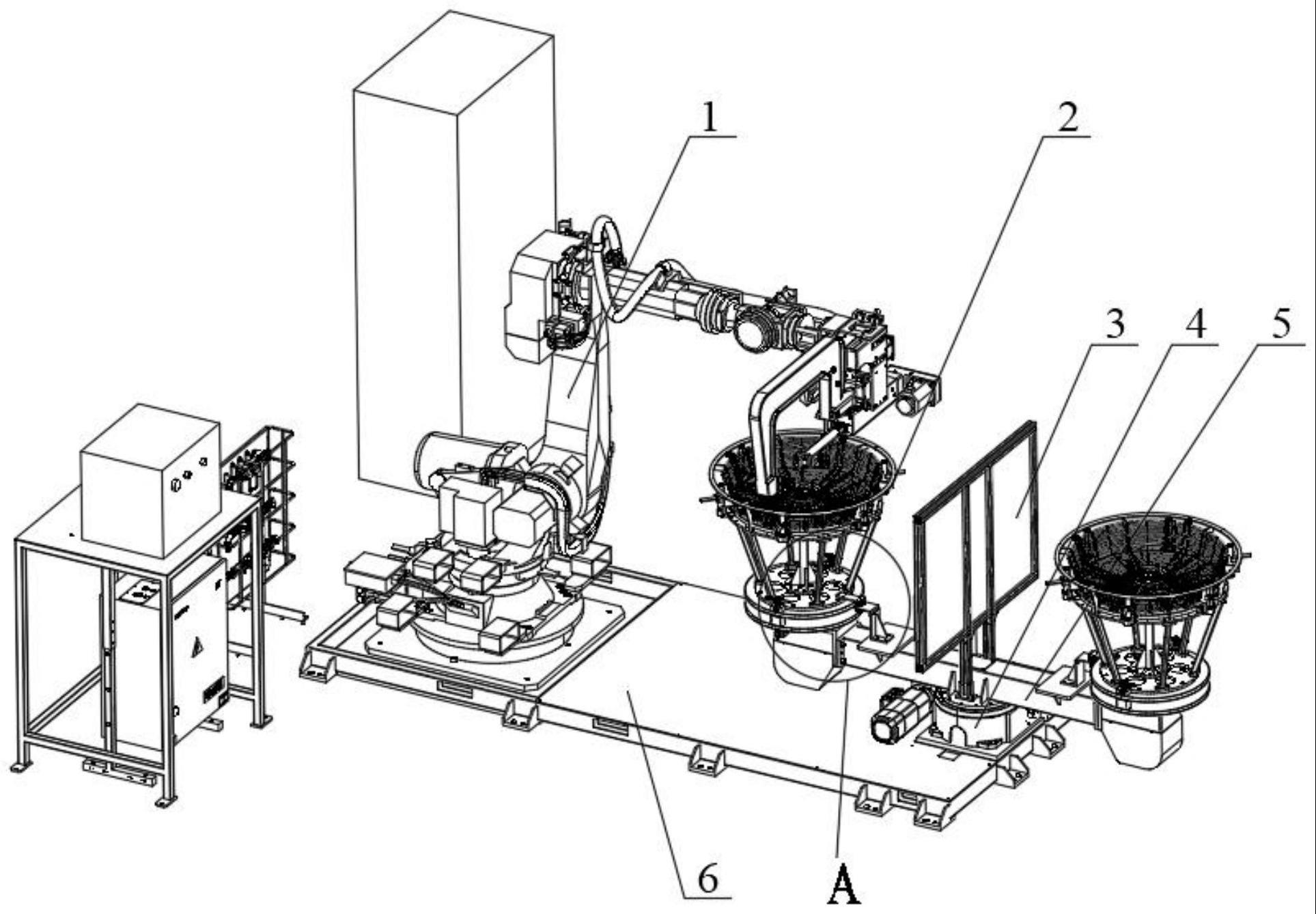
2、一种基于焊接机器人的风扇网罩半自动化焊接平台,该焊接平台的一侧安装焊接机器人,焊接平台的另一侧活动设置焊接变位装置,该焊接变位装置包括伺服转台、钢构支撑臂以及盘条定位工装;伺服转台固设在焊接平台上,且伺服转台的旋转动力输出端通过钢构支撑臂公转连接盘条定位工装;盘条定位工装自转并离合传动连接在钢构支撑臂的两端,且钢构支撑臂的两端内部固设有为盘条定位工装提供旋转动力的动力单元。
3、优选的,钢构支撑臂以水平姿态设置,该钢构支撑臂的中段由伺服转台固定支撑,钢构支撑臂的中部固设有向上延伸并分隔开两组盘条定位工装的防护挡板,钢构支撑臂的两端顶面上通过法兰离合单元支撑盘条定位工装。
4、优选的,法兰离合单元包括基座转盘及离合转盘,其中基座转盘同轴固接在动力单元的旋转动力输出端上,该基座转盘的一个轴向端面周向旋转并轴向限位连接在钢构支撑臂两端的顶面上,且基座转盘的另一个轴向端面上轴向限位并周向离合连接离合转盘;离合转盘的顶部固定支撑盘条定位工装,且离合转盘上垂向穿透连接有销杆;销杆离合穿透插接在基座转盘上。
5、优选的,钢构支撑臂的两端固设有位置传感器,该位置传感器的检测端渐进检测离合转盘与基座转盘相对旋转的初始位置。
6、优选的,钢构支撑臂两端的顶面上固设有环形轨,该环形轨上周向滑动并轴向限位支撑离合转盘的底部端面。
7、优选的,动力单元包括电机及减速机,其中电机及减速机均固设在钢构支撑臂两端的空腔内部,其中减速机的动力输出端同轴固接电机的动力输出端,减速机的动力输出端同轴固接基座转盘。
8、本发明的优点及技术效果在于:
9、本发明的一种基于焊接机器人的风扇网罩半自动化焊接平台,通过焊接变位装置实现机器人焊接工位与人员绑扎工位的分离及交替转换,使二者互不干涉并同时进行,以充分利用人员定位精度高和机器人焊接精度高的优势,有效降低焊接劳动强度,提高焊接效率,保证焊接质量。
10、本发明的一种基于焊接机器人的风扇网罩半自动化焊接平台,1、以伺服转台通过钢构支撑臂公转支撑盘条定位工装,以实现盘条定位工装在焊接工位与人员绑扎工位的相互切换;2、以动力单元为盘条定位工装提供自转动力,以进行焊接过程中的工件变位;3、以法兰离合单元调节盘条定位工装的旋转离合动力,以便于向盘条定位工装上人工绑扎钢筋盘条,最后通过销杆以及位置传感器,有效保证基座转盘与离合转盘的周向相对零点位置以及零点位置锁紧,避免定位误差导致的焊接精度降低问题。
技术特征:
1.一种基于焊接机器人的风扇网罩半自动化焊接平台,该焊接平台的一侧安装焊接机器人,其特征在于:所述焊接平台的另一侧活动设置焊接变位装置,该焊接变位装置包括伺服转台、钢构支撑臂以及盘条定位工装;所述伺服转台固设在焊接平台上,且伺服转台的旋转动力输出端通过钢构支撑臂公转连接盘条定位工装;所述盘条定位工装自转并离合传动连接在钢构支撑臂的两端,且钢构支撑臂的两端内部固设有为盘条定位工装提供旋转动力的动力单元。
2.根据权利要求1所述的一种基于焊接机器人的风扇网罩半自动化焊接平台,其特征在于:所述钢构支撑臂以水平姿态设置,该钢构支撑臂的中段由伺服转台固定支撑,钢构支撑臂的中部固设有向上延伸并分隔开两组盘条定位工装的防护挡板,钢构支撑臂的两端顶面上通过法兰离合单元支撑盘条定位工装。
3.根据权利要求2所述的一种基于焊接机器人的风扇网罩半自动化焊接平台,其特征在于:所述法兰离合单元包括基座转盘及离合转盘,其中基座转盘同轴固接在动力单元的旋转动力输出端上,该基座转盘的一个轴向端面周向旋转并轴向限位连接在钢构支撑臂两端的顶面上,且基座转盘的另一个轴向端面上轴向限位并周向离合连接离合转盘;所述离合转盘的顶部固定支撑盘条定位工装,且离合转盘上垂向穿透连接有销杆;所述销杆离合穿透插接在基座转盘上。
4.根据权利要求3所述的一种基于焊接机器人的风扇网罩半自动化焊接平台,其特征在于:所述钢构支撑臂的两端固设有位置传感器,该位置传感器的检测端渐进检测离合转盘与基座转盘相对旋转的初始位置。
5.根据权利要求3所述的一种基于焊接机器人的风扇网罩半自动化焊接平台,其特征在于:所述钢构支撑臂两端的顶面上固设有环形轨,该环形轨上周向滑动并轴向限位支撑离合转盘的底部端面。
6.根据权利要求3所述的一种基于焊接机器人的风扇网罩半自动化焊接平台,其特征在于:所述动力单元包括电机及减速机,其中电机及减速机均固设在钢构支撑臂两端的空腔内部,其中减速机的动力输出端同轴固接电机的动力输出端,减速机的动力输出端同轴固接基座转盘。
技术总结
本发明公开了一种基于焊接机器人的风扇网罩半自动化焊接平台,该焊接平台的一侧安装焊接机器人,焊接平台的另一侧活动设置焊接变位装置,该焊接变位装置包括伺服转台、钢构支撑臂以及盘条定位工装;伺服转台固设在焊接平台上,且伺服转台的旋转动力输出端通过钢构支撑臂公转连接盘条定位工装;盘条定位工装自转并离合传动连接在钢构支撑臂的两端,且钢构支撑臂的两端内部固设有为盘条定位工装提供旋转动力的动力单元。该焊接平台能够有效降低焊接劳动强度,提高焊接效率,保证焊接质量。
技术研发人员:牛经天,杨瑞军,刘腊腊,范晓东
受保护的技术使用者:天津七所高科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!