一种焊接机器人示教空间定位装置的制作方法
本申请涉及焊接机器人示教,具体涉及一种基于视觉的焊接机器人示教空间定位装置。
背景技术:
1、一般对操作人员示教进行空间定位时,通常至少采用两个相机(基于双目测量原理),例如在专利公开号为:cn113102880a的申请文件中,公开了一种基于视觉示教的线激光焊缝自动跟踪系统,包括线激光视觉传感器,其内部包含两个相同的立体视觉模块,也即两个工业相机,这两个相机可对手持示教装置中的特征识别单元进行拍摄,以获取手持示教装置的位置和姿态,但是这种空间定位方式要利用两个相机,因此这样存在着成本较高的问题。
技术实现思路
1、针对上述问题,本申请的目的在于提供一种焊接机器人示教空间定位装置,以解决现有示教空间定位装置中存在的成本较高的问题。
2、为了实现上述目的,本申请采用了如下的技术方案:一种焊接机器人示教空间定位装置,包括焊接机器人,还包括单目相机和手持器,所述手持器上设置有标志物,所述单目相机放置在所述焊接机器人上,所述单目相机用于对所述标志物进行拍摄。
3、可选地,所述单目相机放置在所述焊接机器人的最后一个机械臂上。
4、可选地,所述标志物为标定板或者特定形状的物体。
5、可选地,所述标志物为红外光发光装置。
6、可选地,所述手持器为无线手柄。
7、有益效果:在操作人员手握手持器进行示教时,通过单目相机来对手持器上的标志物进行空间定位,就可以获得操作人员所示教的空间位置信息,完成对焊接机器人示教的空间定位,整个空间定位过程仅仅只利用了一个相机,和现有技术相比,这样至少可以节省一个相机的硬件成本,从而降低空间定位的成本。
技术特征:
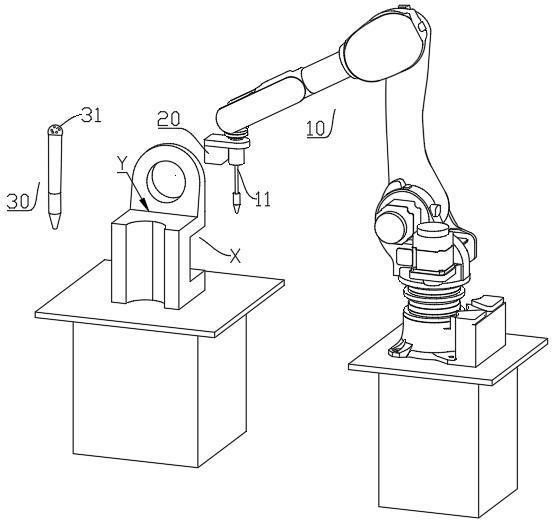
1.一种焊接机器人示教空间定位装置,包括焊接机器人(10),其特征在于,还包括单目相机(20)和手持器(30),所述手持器(30)上设置有标志物(31),所述单目相机(20)放置在所述焊接机器人(10)上,所述单目相机(20)用于对所述标志物(31)进行拍摄。
2.根据权利要求1所述的一种焊接机器人示教空间定位装置,其特征在于,所述单目相机(20)放置在所述焊接机器人(10)的最后一个机械臂上。
3.根据权利要求1所述的一种焊接机器人示教空间定位装置,其特征在于,所述标志物(31)为标定板或者特定形状的物体。
4.根据权利要求1所述的一种焊接机器人示教空间定位装置,其特征在于,所述标志物(31)为红外光发光装置。
5.根据权利要求1所述的一种焊接机器人示教空间定位装置,其特征在于,所述手持器(30)为无线手柄。
技术总结
本申请涉及焊接机器人示教技术领域,具体公开了一种焊接机器人示教空间定位装置,包括焊接机器人,还包括单目相机和手持器,该手持器上设置有标志物,该单目相机放置在焊接机器人上,该单目相机用于对该标志物进行拍摄。本申请仅利用一个相机就可以对手持器上的标志物进行空间定位,从而获得操作人员所示教的空间位置信息,包括其所示教的空间运动轨迹和/或运动姿态,完成对焊接机器人示教的空间定位,这样至少可以节省一个相机的硬件成本,从而降低空间定位的成本。
技术研发人员:程子豪
受保护的技术使用者:佛山墨家科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!