一种起重机端梁自动焊接机器人的制作方法
本发明涉及起重机端梁焊接,具体的说是一种起重机端梁自动焊接机器人。
背景技术:
1、起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械。又称天车,航吊,吊车。对于生产起重机而言,其中一项加工工序是对起重机端梁进行焊接,通常使用熔化极气体保护电弧焊方式焊接,熔化极气体保护电弧焊是采用连续等速送进可熔化的焊丝与被焊工件之间的电弧作为热源来熔化焊丝和母材金属,形成熔池和焊缝的焊接方法。
2、目前,现有的起重机端梁焊接机器人在使用中存在以下不足:首先在电控原件连续等速送入可熔化的焊丝时,不能根据喷嘴的工作状态定量送出焊丝,这就会导致熔化焊丝的熔滴大小不一,喷射不均,影响熔池的成型平整度,在电控件出问题后无法操作自动焊接工作,其次在使用电弧焊时高温会产生多种气体和碎屑等,如果不处理会吸附在熔池内,降低焊缝的质量,污染工作环境,影响整体的焊接效率与质量。
3、例如:现有技术公开了申请号为:cn112658561a的一种起重机端梁自动焊接设备,包括端梁支撑机构、移动车和焊接机器人,所述端梁支撑机构包括底座、翻转变位机和端梁托板,所述翻转变位机设置在底座两端,所述端梁托板通过两端的连接板与翻转变位机连接,因此,本领域技术人员提供了一种起重机端梁自动焊接机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种起重机端梁自动焊接机器人,解决了:现有的起重机焊接机器人在使用时,不能根据喷嘴的工作状态定量送出焊丝,导致熔化焊丝的熔滴大小不一,喷射不均,且电弧焊时高温会产生多种气体和碎屑等,如果不处理会吸附在熔池内,降低焊缝的质量,污染工作环境的问题。
2、为实现以上目的,本发明通过以下技术方案实现:
3、本发明解决其技术问题所采用的技术方案是:一种起重机端梁自动焊接机器人,包括控制机座,所述控制机座的一端转动安装有调节臂,所述调节臂的一端安装有焊头,所述焊头的底端固定连接有蓄料处理筒,所述蓄料处理筒的内侧穿插安装有焊枪,所述蓄料处理筒的底端固定连接有支架,所述支架的底端固定连接有与焊枪相贴合的保护外壳,所述焊枪的底端安装有喷嘴,所述喷嘴的外表面固定连接有安装座,所述安装座的内侧转动安装有加强控制组件,所述加强控制组件包括转动连接在安装座内侧的控制杆、以及转动连接在控制杆底端的控制胶片,所述控制杆的上臂固定连接有短杆,所述保护外壳的一端固定连接有复位组件,所述保护外壳的外表面安装有联动中转组件,所述保护外壳的外表面转动安装有收放卷组件,所述保护外壳的外表面转动安装有分制组件,所述焊枪的内部穿插设置有焊丝。
4、优选的,所述安装座的一端转动连接有上推臂,所述上推臂的底端开设有限位槽,所述限位槽的内侧滑动设置有与短杆相活动连接的限位块。
5、优选的,所述复位组件包括竖向固定连接在保护外壳一端的套筒、以及穿插活动设置在套筒中部的联动杆,所述联动杆位于套筒的内部活动套装有弹簧,所述联动杆与上推臂相配合使用。
6、优选的,所述联动中转组件包括固定连接在保护外壳外表面的安装架、以及转动连接在安装架一端的齿头,所述齿头的一端固定连接有附动杆,所述附动杆的一端转动连接有拉杆,所述安装架的一端穿插转动安装有转盘,所述转盘与拉杆相转动连接,所述转盘的中轴一端固定套装有第二伞齿轮。
7、优选的,所述联动杆的上端固定连接有齿条板,所述齿条板的一端开设有限制槽,所述安装架的一端固定连接有限位架,所述限制槽与限位架相滑动配合,所述齿头与齿条板相啮合匹配。
8、优选的,所述收放卷组件包括转动安装在支架内侧的卷盘、以及固定套装在卷盘一端的蜗轮,所述支架的内侧竖向转动安装有两个转轴,两个所述转轴的上部均固定套装有牵引轮,其中一个所述转轴的下部固定套装有第二齿轮,所述焊丝与卷盘相配合使用。
9、优选的,所述分制组件包括穿插转动安装在支架一端的蜗杆、以及固定套装在蜗杆外表面的第一齿轮,所述蜗杆与蜗轮相啮合,所述第一齿轮与第二齿轮相啮合匹配。
10、优选的,所述蜗杆的底端固定连接有转杆,所述转杆的下部固定套装有第一伞齿轮,所述第一伞齿轮与第二伞齿轮相啮合匹配。
11、优选的,所述喷嘴的外表面套装有收集罩,所述保护外壳与收集罩相固定连接,所述收集罩的外表面固定连接有料管,所述料管的另一端与蓄料处理筒相连通。
12、优选的,所述安装座的一端固定连接有引导桥,所述引导桥的内侧活动设置有传感器,所述控制杆的上表面固定连接有与传感器相配合使用的导杆,所述导杆与引导桥相穿插活动设置。
13、本发明的有益效果:
14、(1)本发明所述的一种起重机端梁自动焊接机器人,通过调节臂的操控下带动并调整焊头的位置角度,焊头带动蓄料处理筒运动,蓄料处理筒带动保护外壳与焊枪活动,在焊枪的运动下喷嘴与加强控制组件活动到焊接位置的前端,当调节臂进入预定角度后加强控制组件中的控制胶片与端梁焊接位置侧沿抵触,有利于对焊接的位置预处理,提高焊接的精准度。
15、(2)本发明所述的一种起重机端梁自动焊接机器人,通过加强控制组件运动后带动联动中转组件活动,联动中转组件活动后能够带动收放卷组件与分制组件转动,其中的蜗杆的转动下第一齿轮与蜗轮被带动进行转动,蜗轮旋转后带动卷盘转动对焊丝进行释放,然后在第一齿轮的转动下带动第二齿轮旋转,第二齿轮转动后转轴旋转带动其中一个牵引轮转动,从而将卷盘上释放的焊丝在牵引轮的转动引导下送入到焊枪的内部,并穿过喷嘴后进行起重机端梁的预焊接作业,有利于端梁焊接作业时焊接机器人自动焊接,对焊丝的自动定量输送,提高熔池的均匀度,保障焊缝平整性,从而提高整体焊接质量。
16、(3)本发明所述的一种起重机端梁自动焊接机器人,通过控制杆的运动下导杆弧型运动,带动引导桥内侧的传感器活动后触控收集罩的开关,实现只有在喷嘴焊接时才会自动打开功能,提高实用效果,在喷嘴焊接时飞尘屑与烟尘被收集罩收集吸入,并经过相连接的料管送出,统一收集到蓄料处理筒内待结束后将其打开取出即可,有利于焊接机器人对端梁焊接时产生的高温飞尘气体与碎屑的收集,提高焊接机器人的使用效果。
技术特征:
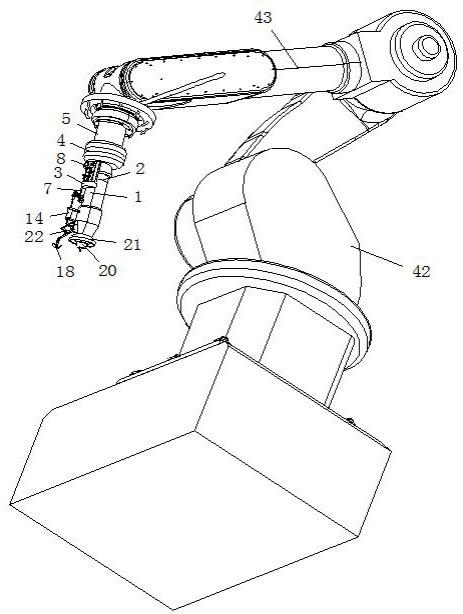
1.一种起重机端梁自动焊接机器人,其特征在于:包括控制机座(42),所述控制机座(42)的一端转动安装有调节臂(43),所述调节臂(43)的一端安装有焊头(5),所述焊头(5)的底端固定连接有蓄料处理筒(4),所述蓄料处理筒(4)的内侧穿插安装有焊枪(2),所述蓄料处理筒(4)的底端固定连接有支架(3),所述支架(3)的底端固定连接有与焊枪(2)相贴合的保护外壳(1),所述焊枪(2)的底端安装有喷嘴(20),所述喷嘴(20)的外表面固定连接有安装座(22),所述安装座(22)的内侧转动安装有加强控制组件(551),所述加强控制组件(551)包括转动连接在安装座(22)内侧的控制杆(17)、以及转动连接在控制杆(17)底端的控制胶片(18),所述控制杆(17)的上臂固定连接有短杆(16),所述保护外壳(1)的一端固定连接有复位组件(552),所述保护外壳(1)的外表面安装有联动中转组件(553),所述保护外壳(1)的外表面转动安装有收放卷组件(554),所述保护外壳(1)的外表面转动安装有分制组件(555),所述焊枪(2)的内部穿插设置有焊丝(19)。
2.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述安装座(22)的一端转动连接有上推臂(15),所述上推臂(15)的底端开设有限位槽(28),所述限位槽(28)的内侧滑动设置有与短杆(16)相活动连接的限位块(29)。
3.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述复位组件(552)包括竖向固定连接在保护外壳(1)一端的套筒(14)、以及穿插活动设置在套筒(14)中部的联动杆(13),所述联动杆(13)位于套筒(14)的内部活动套装有弹簧(24),所述联动杆(13)与上推臂(15)相配合使用。
4.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述联动中转组件(553)包括固定连接在保护外壳(1)外表面的安装架(36)、以及转动连接在安装架(36)一端的齿头(10),所述齿头(10)的一端固定连接有附动杆(39),所述附动杆(39)的一端转动连接有拉杆(37),所述安装架(36)的一端穿插转动安装有转盘(12),所述转盘(12)与拉杆(37)相转动连接,所述转盘(12)的中轴一端固定套装有第二伞齿轮(35)。
5.根据权利要求3或4所述的一种起重机端梁自动焊接机器人,其特征在于:所述联动杆(13)的上端固定连接有齿条板(11),所述齿条板(11)的一端开设有限制槽(38),所述安装架(36)的一端固定连接有限位架(40),所述限制槽(38)与限位架(40)相滑动配合,所述齿头(10)与齿条板(11)相啮合匹配。
6.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述收放卷组件(554)包括转动安装在支架(3)内侧的卷盘(8)、以及固定套装在卷盘(8)一端的蜗轮(30),所述支架(3)的内侧竖向转动安装有两个转轴(32),两个所述转轴(32)的上部均固定套装有牵引轮(33),其中一个所述转轴(32)的下部固定套装有第二齿轮(31),所述焊丝(19)与卷盘(8)相配合使用。
7.根据权利要求6所述的一种起重机端梁自动焊接机器人,其特征在于:所述分制组件(555)包括穿插转动安装在支架(3)一端的蜗杆(6)、以及固定套装在蜗杆(6)外表面的第一齿轮(9),所述蜗杆(6)与蜗轮(30)相啮合,所述第一齿轮(9)与第二齿轮(31)相啮合匹配。
8.根据权利要求4或7所述的一种起重机端梁自动焊接机器人,其特征在于:所述蜗杆(6)的底端固定连接有转杆(7),所述转杆(7)的下部固定套装有第一伞齿轮(34),所述第一伞齿轮(34)与第二伞齿轮(35)相啮合匹配。
9.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述喷嘴(20)的外表面套装有收集罩(21),所述保护外壳(1)与收集罩(21)相固定连接,所述收集罩(21)的外表面固定连接有料管(23),所述料管(23)的另一端与蓄料处理筒(4)相连通。
10.根据权利要求1所述的一种起重机端梁自动焊接机器人,其特征在于:所述安装座(22)的一端固定连接有引导桥(25),所述引导桥(25)的内侧活动设置有传感器(26),所述控制杆(17)的上表面固定连接有与传感器(26)相配合使用的导杆(27),所述导杆(27)与引导桥(25)相穿插活动设置。
技术总结
本发明涉及起重机端梁焊接技术领域,具体的说是一种起重机端梁自动焊接机器人,包括控制机座,所述控制机座的一端转动安装有调节臂,所述调节臂的一端安装有焊头,所述焊头的底端固定连接有蓄料处理筒,所述蓄料处理筒的内侧穿插安装有焊枪,所述蓄料处理筒的底端固定连接有支架,所述支架的底端固定连接有与焊枪相贴合的保护外壳,所述焊枪的底端安装有喷嘴,所述安装座的内侧转动安装有加强控制组件,所述加强控制组件包括转动连接在安装座内侧的控制杆、以及转动连接在控制杆底端的控制胶片,有利于端梁焊接作业时焊接机器人自动焊接,对焊丝的自动定量输送,提高熔池的均匀度,且能对高温飞尘气体与碎屑的收集。
技术研发人员:郭新志
受保护的技术使用者:湖北亿广同盛科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!