基于机器人视觉识别的自动焊接设备及加工工艺的制作方法
本申请涉及容器加工,尤其是涉及一种基于机器人视觉识别的自动焊接设备及加工工艺。
背景技术:
1、完整的保温容器包括杯体、杯盖与杯底,在制造过程中,杯体与杯底通过激光焊接的方式固定,且在焊接前将杯底通过搭接的方式安装。
2、相关技术中,在焊接过程中,对于不同型号的杯体需要设定不同的焊接轨迹,每次更换不同型号杯体时,要提前对焊接轨迹进行设定。
3、在实现上述申请过程中,发明人发现该技术中至少存在如下问题,对于不同型号的杯体焊接时,每次进行杯体更换均需要对激光焊接枪头的焊接轨迹进行调整,所耗费时间较多;同时杯体在传送带上运输,在运输过程中若发生杯体倾倒现象则无法继续焊接过程,导致焊接效率降低。
技术实现思路
1、为了提升焊接效率,本申请提供一种基于机器人视觉识别的自动焊接设备及工艺。
2、第一方面,本申请提供的一种基于机器人视觉识别的自动焊接设备采用如下的技术方案:
3、一种基于机器人视觉识别的自动焊接设备,包括第一支撑架,所述第一支撑架上设置有第一传送带与第二传送带,所述第二传送带置于所述第一传送带上方且第一传送带长度大于第二传送带长度,所述第一支撑架上设置有用于焊接的激光焊接枪头,所述第一支撑架上固定有用于检测装配结果的装配摄像头,所述第一支撑架上端部设置有用于装配的装配机械手。
4、通过采用上述技术方案,在焊接过程中,装配摄像头对杯体和杯底的装配程度进行检测,当杯体和杯底搭接完好时,装配摄像头可将检测信号传输给电脑,电脑控制激光焊接枪头的运动轨迹并对杯体和杯底进行焊接;同时杯体若在第一传送带上发生倾倒时,不会被转移至第二传送带上,不会影响焊接过程的进行,提升了焊接效率。
5、可选的,所述激光焊接枪头有三个且分别设置于第一支撑架顶部与第一支撑架的两侧壁,所述激光焊接枪头滑动连接于第一支撑架。
6、通过采用上述技术方案,第一支撑架两侧壁和第一支撑架顶部均设置有激光焊接枪头,因此可对杯体和杯底的不同位置进行焊接,焊接过程较为便捷。
7、可选的,所述第一支撑架顶部转动连接有转动盘,置于第一支撑架顶部的所述激光焊接枪头转动连接于转动盘端面。
8、通过采用上述技术方案,第一支撑架顶部的激光焊接枪头转动连接于转动盘端面,可对杯体和杯底进行周向焊接,便于焊接过程的进行。
9、可选的,所述第一传送带端部设置有上料检测部,所述上料检测部包括固定于地面的第二支撑架,所述第二支撑架上转动连接有支撑杆,所述支撑杆呈“十”字形,所述支撑杆端部固定有定位杆,所述定位杆上套设有支撑台且支撑台底部固定有用于使支撑台端面保持水平的配重块。
10、通过采用上述技术方案,支撑台上用于放置杯体和杯底,通过支撑杆的转动可调节支撑台位于不同的位置,从而使杯体和杯底的位置发生变化,便于上料过程的进行,同时支撑台底部固定有配重块,配重块用于使支撑台端面保持水平,减小了支撑台端面倾斜而导致杯体和杯底脱离支撑台的可能。
11、可选的,所述支撑杆端面固定有带动杆,所述支撑杆转轴处转动连接有操作块,操作块上滑动连接有操作杆,所述第二支撑架端面固定有带动电机,带动电机转轴处固定有调整杆且调整杆转动连接于操作杆侧壁,所述操作杆上开设有用于穿设带动杆的带动槽。
12、通过采用上述技术方案,带动电机启动带动调整杆转动,调整杆带动操作杆在操作块上滑移同时绕支撑杆轴线处转动,在转动过程中,由于带动杆穿设在带动槽中,因此可带动支撑杆转动,从而带动支撑台转动,同时在操作杆的和转动过程中,带动槽可转动至不同带动杆处,便于带动支撑杆转动,且每次带动支撑杆转动的角度相同。
13、可选的,置于支撑杆顶部的支撑台两侧设置有两上料传送带,地面上固定有用于支撑上料传送带的上料架,所述上料架上滑动连接有推动块且推动块滑动方向垂直于上料传送带运动方向,所述上料架上转动连接有推动盘,所述推动盘端面滑动连接有上料块,上料块端面转动连接有上料杆,所述上料杆端部转动连接于推动块侧壁。
14、通过采用上述技术方案,两上料传送带分别用于放置杯体和杯底,杯体和杯底在上料传送带上运动至支撑杆顶部的支撑台处时,推动盘转动带动推动块滑移,从而将杯体和杯底推动至支撑台上,通过调节上料块在推动盘上的位置,可以调节推动块的滑移距离。
15、可选的,所述装配机械手固定于上料检测部顶部,所述第一支撑架上固定有用于检测焊接质量的检测摄像头,所述第一支撑架上设置有用于清理残次品的清理机械手。
16、通过采用上述技术方案,检测摄像头可对焊接质量进行检测,清理机械手可将质量合格的产品与质量不合格的产品分离,便于收集过程的进行,装配机械手固定于上料检测部顶部,便于对杯体和杯底进行装配。
17、可选的,所述第二支撑架上固定有用于推动产品至第一传送带上的推动电缸,所述第一支撑架上固定有两调整块,且两调整块相对的侧壁上开设有调整导向面。
18、通过采用上述技术方案,第一传送带上的杯体和杯底在调整块及调整导向面的作用下位置被调整,从而使其运动轨迹相同,便于焊接过程的进行。
19、可选的,地面上固定有收纳箱,且所述收纳箱高度高于配重块底部至地面的距离。
20、通过采用上述技术方案,检测不合格的杯体和杯底继续在支撑台上随支撑台运动,运动至支撑杆底部时,支撑台底部的配重块侧壁与收纳箱侧壁接触,支撑台倾斜,将支撑台上的杯体和杯底转移至收纳箱中。
21、第二方面,本申请还公开了一种适用于上述基于机器人视觉识别的自动焊接设备的加工工艺,包括以下步骤:
22、a、将杯体和杯底分别放置在两上料传送带上,推动块将其推动至支撑台上;
23、b、装配机械手对支撑台上的杯体和杯底进行装配;
24、c、支撑杆转动带动杯体和杯底转动,并进行检测;
25、d、检测合格的杯体和杯底被转移至第一传送带上继续运输;检测不合格的杯体和杯底继续随支撑杆转动;
26、e、杯体和杯底被转移至第二传送带上,激光焊接枪头转动对其进行焊接;
27、f、焊接完成后检测摄像头对其进行检测,并由清理机械手分拣焊接质量合格的产品和焊接质量不合格的产品。
28、通过采用上述技术方案,
29、综上所述,本申请包括以下至少一种基于机器人视觉识别的自动焊接设备及工艺有益技术效果:
30、1.焊接过程中,装配摄像头对杯体和杯底的装配程度进行检测,当杯体和杯底搭接完好时,装配摄像头可将检测信号传输给电脑,电脑控制激光焊接枪头的运动轨迹并对杯体和杯底进行焊接;同时杯体若在第一传送带上发生倾倒时,不会被转移至第二传送带上,不会影响焊接过程的进行,提升了焊接效率;
31、2.第一支撑架顶部的激光焊接枪头转动连接于转动盘端面,可对杯体和杯底进行周向焊接,便于焊接过程的进行。
技术特征:
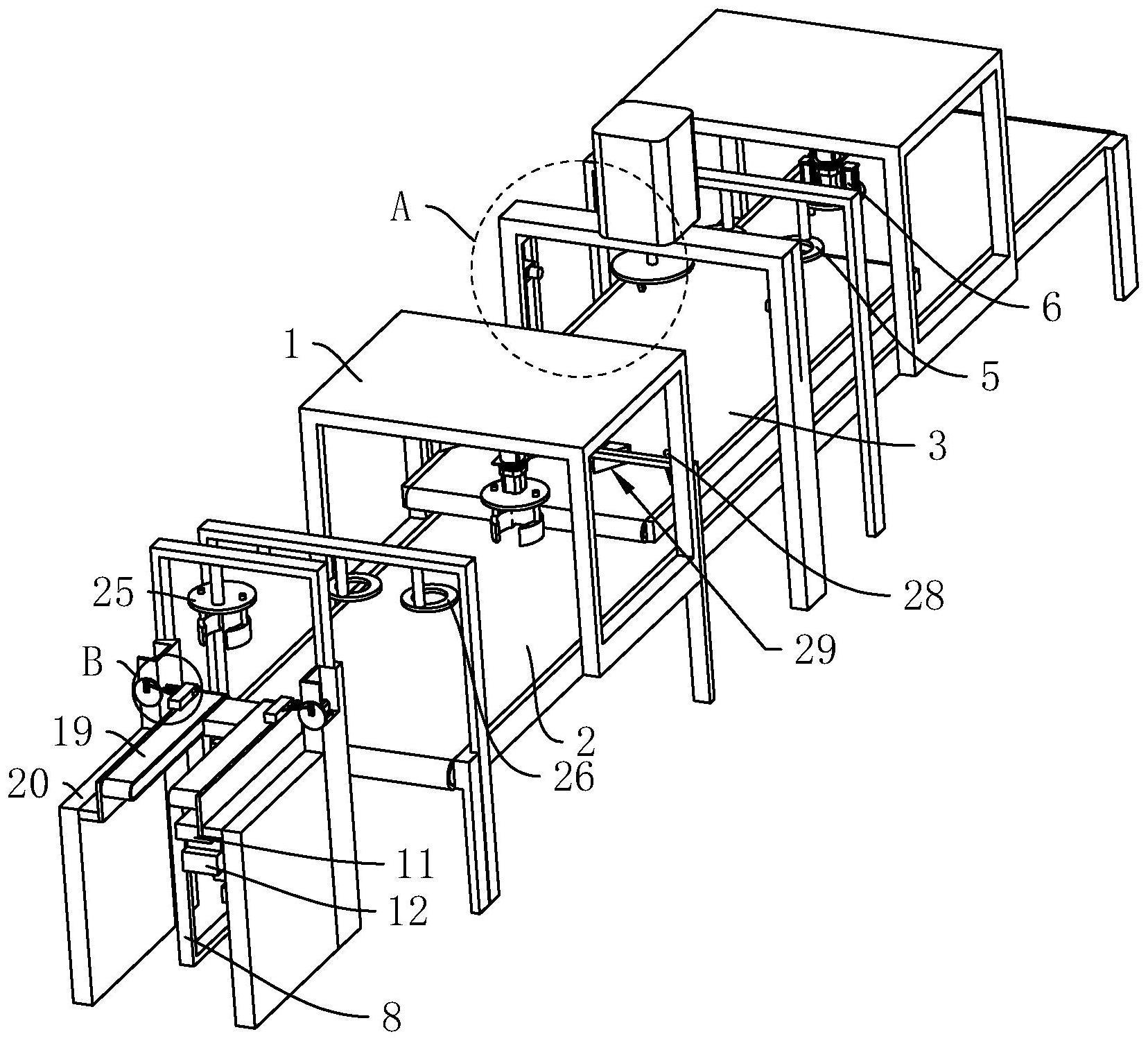
1.一种基于机器人视觉识别的自动焊接设备,其特征在于:包括第一支撑架(1),所述第一支撑架(1)上设置有第一传送带(2)与第二传送带(3),所述第二传送带(3)置于所述第一传送带(2)上方且第一传送带(2)长度大于第二传送带(3)长度,所述第一支撑架(1)上设置有用于焊接的激光焊接枪头(4),所述第一支撑架(1)上固定有用于检测装配结果的装配摄像头(26),所述第一支撑架(1)上端部设置有用于装配的装配机械手(25)。
2.根据权利要求1所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述激光焊接枪头(4)有三个且分别设置于第一支撑架(1)顶部与第一支撑架(1)的两侧壁,所述激光焊接枪头(4)滑动连接于第一支撑架(1)。
3.根据权利要求2所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述第一支撑架(1)顶部转动连接有转动盘(7),置于第一支撑架(1)顶部的所述激光焊接枪头(4)转动连接于转动盘(7)端面。
4.根据权利要求1所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述第一传送带(2)端部设置有上料检测部,所述上料检测部包括固定于地面的第二支撑架(8),所述第二支撑架(8)上转动连接有支撑杆(9),所述支撑杆(9)呈“十”字形,所述支撑杆(9)端部固定有定位杆(10),所述定位杆(10)上套设有支撑台(11)且支撑台(11)底部固定有用于使支撑台(11)端面保持水平的配重块(12)。
5.根据权利要求4所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述支撑杆(9)端面固定有带动杆(13),所述支撑杆(9)转轴处转动连接有操作块(14),操作块(14)上滑动连接有操作杆(15),所述第二支撑架(8)端面固定有带动电机(16),带动电机(16)转轴处固定有调整杆(17)且调整杆(17)转动连接于操作杆(15)侧壁,所述操作杆(15)上开设有用于穿设带动杆(13)的带动槽(18)。
6.根据权利要求4所述的基于机器人视觉识别的自动焊接设备,其特征在于:置于支撑杆(9)顶部的支撑台(11)两侧设置有两上料传送带(19),地面上固定有用于支撑上料传送带(19)的上料架(20),所述上料架(20)上滑动连接有推动块(21)且推动块(21)滑动方向垂直于上料传送带(19)运动方向,所述上料架(20)上转动连接有推动盘(22),所述推动盘(22)端面滑动连接有上料块(23),上料块(23)端面转动连接有上料杆(24),所述上料杆(24)端部转动连接于推动块(21)侧壁。
7.根据权利要求4所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述装配机械手(25)固定于上料检测部顶部,所述第一支撑架(1)上固定有用于检测焊接质量的检测摄像头(5),所述第一支撑架(1)上设置有用于清理残次品的清理机械手(6)。
8.根据权利要求7所述的基于机器人视觉识别的自动焊接设备,其特征在于:所述第二支撑架(8)上固定有用于推动产品至第一传送带(2)上的推动电缸(27),所述第一支撑架(1)上固定有两调整块(28),且两调整块(28)相对的侧壁上开设有调整导向面(29)。
9.根据权利要求1所述的基于机器人视觉识别的自动焊接设备,其特征在于:地面上固定有收纳箱(30),且所述收纳箱(30)高度高于配重块(12)底部至地面的距离。
10.一种适用于上述基于机器人视觉识别的自动焊接设备的加工工艺,其特征在于,包括以下步骤:
技术总结
本申请公开了一种基于机器人视觉识别的自动焊接设备及加工工艺,涉及容器加工技术领域,其包括第一支撑架,所述第一支撑架上设置有第一传送带与第二传送带,所述第二传送带置于所述第一传送带上方且第一传送带长度大于第二传送带长度,所述第一支撑架上设置有用于焊接的激光焊接枪头,所述第一支撑架上固定有用于检测焊接质量的检测摄像头,所述第一支撑架上设置有用于清理残次品的清理机械手。本申请具有提升焊接效率的效果。
技术研发人员:吴海洋,吴存君,梁郁健,唐小辉
受保护的技术使用者:浙江安胜科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!