一种搬运机械手的制作方法
本发明涉及机械手,尤其涉及一种搬运机械手。
背景技术:
1、在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成工件的取放。对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带a上的工件或物品搬运到传送带b上。通过机械手来完成上升、下移、左移、右移抓紧和放松等操作过程。
2、机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。工业机械手是近几十年发展起来的一种高科技自动化生产设备,其可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
3、经检索,专利公开号为cn108792612b的一种搬运机械手,涉及搬运机构技术领域。搬运机械手包括用于提供驱动力的驱动组件,以及用于抓取和释放工件的抓取组件,还包括:转动臂的一端与驱动组件的输出端连接,另一端与抓取组件连接;平衡组件的一端与驱动组件的输出端连接,平衡组件的另一端与转动臂连接,驱动组件的输出端转动以驱动转动臂动作以实现抓取组件在第一工位和第二工位之间的移动。在实现该方案的过程中发现现有技术中存在如下问题没有得到良好的解决:现有技术中的搬运机械手在夹取物料进行上升过程中,一般采用摆动的方式进行上升操作,但是在程序设置时会直接将摆动幅度设置一定,也就是表明将上升高度设置一定,使其在将物料上升的不同高度时,不具有较好的调节效果,无法满足人们的使用需求,因此,亟需设计一种搬运机械手来解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、本发明提供一种搬运机械手,旨在解决物料上升到不同高度时不具有较好的调节效果,无法满足人们使用需求的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种搬运机械手,包括:
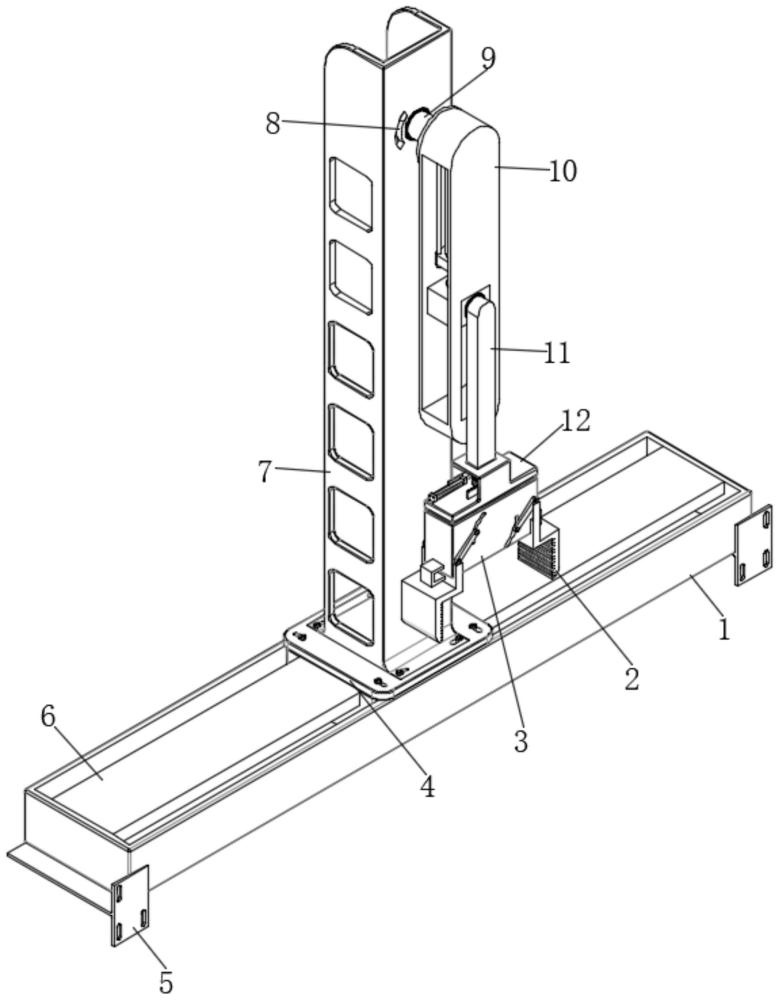
5、水平位移机构;
6、机械手撑架,所述机械手撑架安装在所述水平位移机构的顶部;
7、摆臂机构,所述摆臂机构安装在所述机械手撑架的顶部;
8、旋转机构,所述旋转机构安装在所述摆臂机构的一侧,且位于所述机械手撑架的一侧;
9、夹爪机构,所述夹爪机构安装在所述旋转机构的底部,且位于所述机械手撑架的一侧;
10、所述摆臂机构包括开设在机械手撑架一侧顶部的安装孔,且安装孔的内壁通过轴承连接有工字型转盘,机械手撑架的内壁顶部固定安装有基板,基板的一侧固定安装有用于驱动工字型转盘的第二电机,所述工字型转盘远离机械手撑架的一端固定安装有转动框,且工字型转盘靠近机械手撑架的一端内壁顶部固定有限位杆,所述机械手撑架的顶部一侧开设有第一弧形导向槽,且第一弧形导向槽的弧形与安装孔的圆心重合,第一弧形导向槽的内壁滑动设置有导向块,导向块的顶部一侧固定有限位挡座,限位挡座的位置与限位杆的位置相对应,所述机械手撑架的一侧内壁固定安装有第一液压缸,且第一液压缸的活塞端顶部与导向块的底部之间通过销轴连接有第一推拉杆。
11、进一步的,所述水平位移机构包括支撑框,且支撑框的内壁滑动设置有u型移动座,u型移动座的顶部固定安装有支撑底座,机械手撑架固定安装在支撑底座的顶部中间位置,所述u型移动座的中间位置开设有螺纹通孔,且螺纹通孔的内壁螺纹连接有螺纹杆,螺纹杆的一端与支撑框的一端内壁之间通过销轴连接,支撑框的另一端内壁固定安装有用于驱动螺纹杆旋转的第一电机。
12、进一步的,所述转动框的一侧底部开设有导向竖槽,且导向竖槽的内壁与转动框的内壁之间滑动设置有升降座,升降座的顶部与转动框的顶部内壁之间固定安装有第二液压缸,所述升降座的一端开设有转动孔,且转动孔的内壁通过轴承连接有摆动轴,摆动轴的一端固定有连接臂,连接臂的底部固定有吊框。
13、进一步的,所述旋转机构包括开设在吊框底部中间位置的中心孔,且中心孔的内壁通过轴承连接有旋转轴,旋转轴的顶部与吊框的顶部内壁通过销轴连接,旋转轴的外壁固定有插接在吊框内的齿轮,齿轮的一侧啮合有u型齿条板,u型齿条板一侧内壁的一端与吊框的顶部内壁之间固定安装有气缸。
14、进一步的,所述夹爪机构包括固定安装在旋转轴底部的机框,且机框的顶部内壁中间位置固定有基座,基座的底部固定安装有第三电机,第三电机设置为双轴电机,第三电机的两个输出轴均固定安装有呈倾斜状的旋转臂,所述机框两侧外壁的一端顶部和另一端底部均开设有第二弧形导向槽,且第二弧形导向槽的弧形位置与第三电机的输出轴轴心重合,两个旋转臂的两端之间均固定有插接在两个第二弧形导向槽内的连接轴,两个连接轴的两端均转动连接有呈倾斜状的第二推拉杆,相邻两个第二推拉杆的一端通过销轴连接有夹爪板,两个夹爪板分别贴合设置在机框的底部两端。
15、进一步的,两个所述夹爪板上均开设有导向口,且机框的两端底部之间固定安装有穿过两个导向口的第二导轨板。
16、进一步的,两个所述夹爪板的相对侧底部均开设有等距离分布的防滑槽。
17、进一步的,所述支撑框的两端内壁顶部之间固定安装有第一导轨板,且u型移动座的内壁与第一导轨板的外壁滑动连接。
18、进一步的,所述支撑框的两端均固定连接有安装架,且安装架的横截面呈t型,安装架的一端开设有多个安装基孔。
19、(三)有益效果
20、本发明提供了一种搬运机械手,具备以下有益效果:
21、1、通过设置的水平位移机构、机械手撑架、摆臂机构、吊框、旋转机构和夹爪机构等组成整个搬运机械手结构,利用夹爪机构对物料进行夹取处理,并利用摆臂机构对夹爪机构和物料进行摆动式上升操作,再通过第二液压缸调节升降座在转动框和导向竖槽内移动,调节夹爪机构和物料的竖直高度或水平位置,实现对物料的搬运操作,使得该搬运机械手结构简单,可靠性高,并在搬运过程中,使得物料在夹爪机构自身重力作用下始终处于垂直方向上,便于在上升完成后进行直接卸料操作;
22、2、通过设置的旋转机构可带动夹爪机构进行旋转处理,从而调节物料在搬运前后的不同朝向,便于安放,并可通过水平移动机构来调节整个搬运机械手的水平位置,便于将物料搬运到不同水平位置处;
23、3、通过设置的第一弧形导向槽、工字型转盘、限位杆、导向块、限位挡座、第一推拉杆和第一液压缸,在通过摆臂机构进行旋转上升时,可利用第一液压缸调节第一推拉杆和导向块的位置,并调节限位挡座的位置,改变限位杆与限位挡座之间的夹角,便于对摆臂机构的摆动幅度进行调节处理,使的物料能够上升到不同高度,使得整个搬运机械手具有较好的调节效果,满足人们的使用需求。
技术特征:
1.一种搬运机械手,其特征在于,包括:
2.如权利要求1所述的一种搬运机械手,其特征在于,所述水平位移机构包括支撑框(1),且支撑框(1)的内壁滑动设置有u型移动座(14),u型移动座(14)的顶部固定安装有支撑底座(4),机械手撑架(7)固定安装在支撑底座(4)的顶部中间位置,所述u型移动座(14)的中间位置开设有螺纹通孔,且螺纹通孔的内壁螺纹连接有螺纹杆(15),螺纹杆(15)的一端与支撑框(1)的一端内壁之间通过销轴连接,支撑框(1)的另一端内壁固定安装有用于驱动螺纹杆(15)旋转的第一电机(13)。
3.如权利要求2所述的一种搬运机械手,其特征在于,所述转动框(10)的一侧底部开设有导向竖槽(23),且导向竖槽(23)的内壁与转动框(10)的内壁之间滑动设置有升降座(21),升降座(21)的顶部与转动框(10)的顶部内壁之间固定安装有第二液压缸(20),所述升降座(21)的一端开设有转动孔(22),且转动孔(22)的内壁通过轴承连接有摆动轴(27),摆动轴(27)的一端固定有连接臂(11),连接臂(11)的底部固定有吊框(12)。
4.如权利要求3所述的一种搬运机械手,其特征在于,所述旋转机构包括开设在吊框(12)底部中间位置的中心孔,且中心孔的内壁通过轴承连接有旋转轴(38),旋转轴(38)的顶部与吊框(12)的顶部内壁通过销轴连接,旋转轴(38)的外壁固定有插接在吊框(12)内的齿轮(39),齿轮(39)的一侧啮合有u型齿条板(28),u型齿条板(28)一侧内壁的一端与吊框(12)的顶部内壁之间固定安装有气缸(29)。
5.如权利要求4所述的一种搬运机械手,其特征在于,所述夹爪机构包括固定安装在旋转轴(38)底部的机框(3),且机框(3)的顶部内壁中间位置固定有基座(36),基座(36)的底部固定安装有第三电机(37),第三电机(37)设置为双轴电机,第三电机(37)的两个输出轴均固定安装有呈倾斜状的旋转臂(34),所述机框(3)两侧外壁的一端顶部和另一端底部均开设有第二弧形导向槽(32),且第二弧形导向槽(32)的弧形位置与第三电机(37)的输出轴轴心重合,两个旋转臂(34)的两端之间均固定有插接在两个第二弧形导向槽(32)内的连接轴,两个连接轴的两端均转动连接有呈倾斜状的第二推拉杆(31),相邻两个第二推拉杆(31)的一端通过销轴连接有夹爪板(2),两个夹爪板(2)分别贴合设置在机框(3)的底部两端。
6.如权利要求5所述的一种搬运机械手,其特征在于,两个所述夹爪板(2)上均开设有导向口(35),且机框(3)的两端底部之间固定安装有穿过两个导向口(35)的第二导轨板(30)。
7.如权利要求6所述的一种搬运机械手,其特征在于,两个所述夹爪板(2)的相对侧底部均开设有等距离分布的防滑槽(33)。
8.如权利要求2所述的一种搬运机械手,其特征在于,所述支撑框(1)的两端内壁顶部之间固定安装有第一导轨板(6),且u型移动座(14)的内壁与第一导轨板(6)的外壁滑动连接。
9.如权利要求2所述的一种搬运机械手,其特征在于,所述支撑框(1)的两端均固定连接有安装架(5),且安装架(5)的横截面呈t型,安装架(5)的一端开设有多个安装基孔。
技术总结
本发明涉及机械手技术领域,提供了一种搬运机械手,包括水平位移机构;机械手撑架,所述机械手撑架安装在所述水平位移机构的顶部;摆臂机构,所述摆臂机构安装在所述机械手撑架的顶部;旋转机构,所述旋转机构安装在所述摆臂机构的一侧,且位于所述机械手撑架的一侧;夹爪机构,所述夹爪机构安装在所述旋转机构的底部,且位于所述机械手撑架的一侧。本发明中利用夹爪机构对物料进行夹取处理,实现对物料的搬运操作,使得该搬运机械手结构简单,可靠性高,便于对摆臂机构的摆动幅度进行调节处理,使的物料能够上升到不同高度,使得整个搬运机械手具有较好的调节效果。
技术研发人员:章辉
受保护的技术使用者:嘉兴猛犸象工业设计有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!