一种天轨回字生产线的制作方法
本发明涉及机械手,具体是一种天轨回字生产线。
背景技术:
1、使用桁架机械手搬运货物、对工件进行加工是一种常见的自动化作业方式,能够有效的提高作业效率。在很多行业中对机械手臂移动的精准度要求较高,而大多桁架机械手的机械手臂在工作过程中进行多次的来回移动后难免会因为各种问题使机械手臂的实际位置和预设位置之间产生一定的差距,进而影响机械手臂工作的精准度。而且,桁架机械手所包含的结构较多,使得其连接结构较为复杂。另外,在处理结构部件较多的产品的零部件时,为提高作业效率,需要同时使用较多的机械手臂进行操作,此时,经常会加长直线式生产线的长度来满足要求,而这种办法的空间利用率低,而且增大了工作人员对生产线作业过程监测的难度。
技术实现思路
1、本发明的目的是针对以上问题提供一种空间利用率高、监测方便、便于精准控制机械手臂且结构简单的天轨回字生产线。
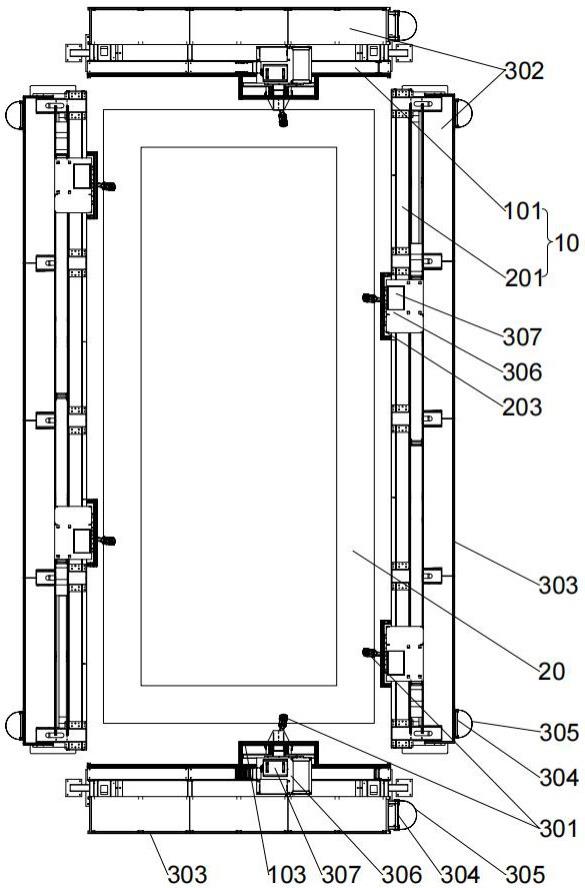
2、为达到上述目的,本发明公开了一种天轨回字生产线,包括前后对称设置的两横向桁架和左右对称设置的两纵向桁架,两横向桁架和两纵向桁架围成矩形的桁架结构,所述桁架结构内侧下方设有矩形工位,所述桁架结构与所述工位形成回字结构。横向桁架和纵向桁架上分别设有可沿其长度方向移动的横滑台和纵滑台,所述横滑台和纵滑台上皆设有机械手臂,所述机械手臂位于桁架结构下方设置。回字结构的生产线有效的提高了空间利用率,可以根据实际的空间范围调整桁架结构的具体尺寸,灵活度高。
3、优选地,所述横滑台上设置有位于横向桁架下方且沿横向竖直设置的矩形横向视觉框架,所述纵滑台上设置有位于纵向桁架下方且沿纵向竖直设置的矩形纵向视觉框架,所述机械手臂包括位于始端连接横滑台或纵滑台的基座,所述基座位于与其相对应的横向视觉框架或纵向视觉框架内。横向视觉框架和纵向视觉框架的设置能够便于生产作业中使用视觉相机对机器人进行精准定位,便于精准控制机械手臂的作业,提高了作业的精准度。
4、优选地,所述横向桁架和所述纵向桁架外侧皆沿其长度方向设置有水平的维修通道,所述维修通道的外侧设有竖直向上的第一防护栏,所述维修通道的一端或两端设置有维修爬梯,所述纵向桁架上沿其长度方向等间距设置有多个向下伸出的第一立柱,所述横向桁架上设置有多个向下竖直设置的第二立柱。维修通道和维修爬梯的设置能够方便对桁架结构进行维修。
5、优选地,所述横滑台和所述纵滑台上皆通过水平设置的控制托盘设置有系统控制站,所述横向桁架和所述纵向桁架上皆沿其长度方向设置有拖链托板,所述拖链托板内设置有拖链,所述拖链的一端固定设置于其所在的拖链托板上,另一端电连接与其相对应的系统控制站。
6、优选地,所述纵滑台水平安装于所述纵向桁架底侧,所述第一立柱包括竖直设置的立柱本体和自其上端部向内延伸的固定块,所述纵向桁架位于所述立柱本体内侧且纵向桁架上端面连接所述固定块下侧面,所述纵向桁架上设置的拖链托板开口向上设置于所述第一立柱上端面。第一立柱结构以及其与纵向桁架和位于该纵向桁架上的拖链托板的连接设置结构简单。
7、优选地,与所述纵向桁架相连的维修通道内侧边开设有多个安装槽,所述安装槽与所述第一立柱一一对应设置,所述立柱本体上端部向上穿过所述安装槽,即所述立柱本体上端部位于所述维修通道上方设置,所述固定块位于所述维修通道上方设置。该设置使得结构更加合理,进一步提高了空间利用率。
8、优选地,所述纵向桁架前后两侧面的下部沿其长度方向分别设有朝向前和朝向后的两纵向直线导轨,所述纵滑台上侧面设有前后对称设置的两纵向滑块,所述纵向滑块上开设有与纵向直线导轨相适配的c形滑槽,前后两纵向滑块上的滑槽开口分别向后和向前设置,所述纵滑台上设有第一伺服电机配减速机,所述第一伺服电机配减速机传动连接有第一传动齿轮,所述纵向桁架下侧面沿其长度方向设有与第一传动齿轮相适配的第一齿条。
9、优选地,位于所述纵滑台上的机械手臂的基座连接该纵滑台下表面,所述纵向视觉框架包括位于其上端水平设置的矩形安装框和连接于所述安装框下方的u形框,所述安装框连接所述纵滑台上表面,所述纵滑台上设置的控制托盘通过竖直设置的第一支架固定连接于纵滑台上侧面的内端部。通过安装框将纵向视觉框架安装于纵滑台上表面,使得纵向视觉框架与纵滑台的连接结构简单且稳固。
10、优选地,所述横滑台竖直设置于所述横向桁架的内侧,所述横向桁架的内侧壁沿其长度方向设有上下对称设置的两第二直线导轨,所述横滑台上设有第二伺服电机配减速机,所述第二伺服电机配减速机传动连接有第二传动齿轮,所述横向桁架的内侧壁沿其长度方向上设有与所述第二传动齿轮相适配的第二齿条。
11、优选地,所述横滑台通过向下伸出的安装立柱连接机械手臂,所述横滑台所连接的机械手臂的基座连接所述安装立柱下端且位于横向视觉框架中间位置,所述横滑台上端连接有向内延伸的水平安装板,所述横滑台上设置的控制托板通过竖直设置的第二支架固定连接于所述安装板上。简化了横滑台和与之相连的部件之间的连接结构。
12、综上所述,本发明的有益效果在于:在本发明中,回字结构的生产线有效的提高了空间利用率,可以根据实际的空间范围调整桁架结构的具体尺寸,灵活度高;横向视觉框架和纵向视觉框架的设置能够便于生产作业中使用视觉相机对机器人进行精准定位,便于精准控制机械手臂的作业,提高了作业的精准度;维修通道和维修爬梯的设置能够方便对桁架结构进行维修;第一立柱结构以及其与纵向桁架和位于该纵向桁架上的拖链托板的连接设置结构简单合理,进一步提高了空间利用率。
技术特征:
1.一种天轨回字生产线,其特征在于,包括前后对称设置的两横向桁架(101)和左右对称设置的两纵向桁架(201),两横向桁架(101)和两纵向桁架(201)围成矩形的桁架结构(10),所述桁架结构(10)内侧下方设有矩形工位(20),所述桁架结构(10)与所述工位(20)形成回字结构,横向桁架(101)和纵向桁架(201)上分别设有可沿其长度方向移动的横滑台(102)和纵滑台(202),所述横滑台(102)和纵滑台(202)上皆设有机械手臂(301),所述机械手臂(301)位于桁架结构(10)下方设置。
2.如权利要求1所述的天轨回字生产线,其特征在于,所述横滑台(102)上设置有位于横向桁架(101)下方且沿横向竖直设置的矩形横向视觉框架(103),所述纵滑台(202)上设置有位于纵向桁架(201)下方且沿纵向竖直设置的矩形纵向视觉框架(203),所述机械手臂(301)包括位于始端连接横滑台(102)或纵滑台(202)的基座(311),所述基座(311)位于与其相对应的横向视觉框架(103)或纵向视觉框架(203)内。
3.如权利要求2所述的天轨回字生产线,其特征在于,所述横向桁架(101)和所述纵向桁架(201)外侧皆沿其长度方向设置有水平的维修通道(302),所述维修通道(302)的外侧设有竖直向上的第一防护栏(303),所述维修通道(302)的一端或两端设置有维修爬梯(304),所述纵向桁架(201)上沿其长度方向等间距设置有多个向下伸出的第一立柱(204),所述横向桁架(101)上设置有多个向下竖直设置的第二立柱(104)。
4.如权利要求3所述的天轨回字生产线,其特征在于,所述横滑台(102)和所述纵滑台(202)上皆通过水平设置的控制托盘(306)设置有系统控制站(307),所述横向桁架(101)和所述纵向桁架(201)上皆沿其长度方向设置有拖链托板(308),所述拖链托板(308)内设置有拖链(309),所述拖链(309)的一端固定设置于其所在的拖链托板(308)上,另一端电连接与其相对应的系统控制站(307)。
5.如权利要求4所述的天轨回字生产线,其特征在于,所述纵滑台(202)水平安装于所述纵向桁架(201)底侧,所述第一立柱(204)包括竖直设置的立柱本体(241)和自其上端部向内延伸的固定块(242),所述纵向桁架(201)位于所述立柱本体(241)内侧且纵向桁架(201)上端面连接所述固定块(242)下侧面,所述纵向桁架(201)上设置的拖链托板(308)开口向上设置于所述第一立柱(204)上端面。
6.如权利要求5所述的天轨回字生产线,其特征在于,与所述纵向桁架(201)相连的维修通道(302)内侧边开设有多个安装槽(243),所述安装槽(243)与所述第一立柱(204)一一对应设置,所述立柱本体(241)上端部向上穿过所述安装槽(243),即所述立柱本体(241)上端部位于所述维修通道(302)上方设置,所述固定块(242)位于所述维修通道(302)上方设置。
7.如权利要求5所述的天轨回字生产线,其特征在于,所述纵向桁架(201)前后两侧面的下部沿其长度方向分别设有朝向前和朝向后的两纵向直线导轨(206),所述纵滑台(202)上侧面设有前后对称设置的两纵向滑块(207),所述纵向滑块(207)上开设有与纵向直线导轨(206)相适配的c形滑槽(271),前后两纵向滑块(207)上的滑槽(271)开口分别向后和向前设置,所述纵滑台(202)上设有第一伺服电机配减速机(208),所述第一伺服电机配减速机(208)传动连接有第一传动齿轮(281),所述纵向桁架(201)下侧面沿其长度方向设有与第一传动齿轮(281)相适配的第一齿条(209)。
8.如权利要求5所述的天轨回字生产线,其特征在于,位于所述纵滑台(202)上的机械手臂(301)的基座(311)连接该纵滑台(202)下表面,所述纵向视觉框架(203)包括位于其上端水平设置的矩形安装框(231)和连接于所述安装框(231)下方的u形框(232),所述安装框(231)连接所述纵滑台(202)上表面,所述纵滑台(202)上设置的控制托盘(306)通过竖直设置的第一支架(211)固定连接于纵滑台(202)上侧面的内端部。
9.如权利要求4所述的天轨回字生产线,其特征在于,所述横滑台(102)竖直设置于所述横向桁架(101)的内侧,所述横向桁架(101)的内侧壁沿其长度方向设有上下对称设置的两第二直线导轨(105),所述横滑台(102)上设有第二伺服电机配减速机(106),所述第二伺服电机配减速机(106)传动连接有第二传动齿轮,所述横向桁架(101)的内侧壁沿其长度方向上设有与所述第二传动齿轮相适配的第二齿条(107)。
10.如权利要求9所述的天轨回字生产线,其特征在于,所述横滑台(102)通过向下伸出的安装立柱(108)连接机械手臂(301),所述横滑台(102)所连接的机械手臂(301)的基座(311)连接所述安装立柱(108)下端且位于横向视觉框架(103)中间位置,所述横滑台(102)上端连接有向内延伸的水平安装板(109),所述横滑台(102)上设置的控制托板通过竖直设置的第二支架(110)固定连接于所述安装板(109)上。
技术总结
本发明涉及机械手技术领域,具体是一种天轨回字生产线,包括前后对称设置的两横向桁架和左右对称设置的两纵向桁架,两横向桁架和两纵向桁架围成矩形的桁架结构,桁架结构内侧下方设有矩形工位,桁架结构与工位形成回字结构。横向桁架和纵向桁架上分别设有可沿其长度方向移动的横滑台和纵滑台,横滑台和纵滑台上皆设有机械手臂,机械手臂位于桁架结构下方设置。回字结构的生产线有效的提高了空间利用率,可以根据实际的空间范围调整桁架结构的具体尺寸,灵活度高。设置有横向视觉框架和纵向视觉框架,能够便于生产作业中使用视觉相机对机器人进行精准定位,便于精准控制机械手臂的作业,提高了作业的精准度。
技术研发人员:陈晓龙,范宣平,陈振东,范宣泽
受保护的技术使用者:潍坊和特管业发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!