一种承力件施力装置及施力方法与流程
本发明涉及一种施力器械,尤其涉及一种用于对螺栓或者其它承力件进行施力的施力装置及使用该施力装置的施力方法。
背景技术:
1、螺栓拉伸器是一种能够对螺栓进行施力的承力件施力装置,其作用是通过对螺栓施加拉力以检测螺栓的锁紧力或方便对螺母进行锁紧。
2、现有技术中,螺栓拉伸器基本都是液压式螺栓拉伸器,即采用液压作为动力来对螺栓进行拉拔,这种液压式螺栓拉伸器存在明显的问题,液压结构比较笨重,不仅尺寸大、加工难度较大,而且液压的压强最高也就是150兆帕,如果压力再高,密封圈就会出现问题。
3、为了能够简化施力结构,克服液压式施力结构存在的问题,我们公司研制了“一种螺栓拉伸器”,并申请了相应的专利,专利申请号为“2023113572972”,该专利中,设置左侧楔面式施力单元和右侧楔面式施力单元,螺栓拉伸器还包括驱动左侧楔面式施力单元的第一构件、右侧楔面式施力单元的第一构件同速相对移动或同速相背移动的构件驱动机构,构件驱动机构包括与左侧楔面式施力单元的第一构件传动连接的左侧驱动机构,构件驱动机构还包括与右侧楔面式施力单元的第一构件传动链接的右侧驱动机构。
4、使用时,左侧驱动机构、右侧驱动机构同时动作,驱动两个楔面式施力单元的第一构件同速相背移动或相对移动,保证左侧楔面式施力单元的第二构件对拉伸螺母的作用力与右侧楔面式施力单元的第二构件对拉伸螺母的作用力的合力与拉伸螺母、被拉伸的螺栓同轴线设置,从而保证被拉伸的螺栓不会受到偏载力,可以保证螺栓仅沿轴向变形。
5、但是这种新型的螺栓拉伸器在使用时,也发现了其存在一些其它问题:1、需要两套驱动机构,即左侧驱动机构、右侧驱动机构需要同步动作,对两个驱动机构的同步控制在施工现场是一个难题,在施工现场,往往由于两个驱动机构动作不同步,而使螺栓受到非轴向的偏载拉伸力;此外,左侧驱动机构、右侧驱动机构两个驱动机构会占用较大的空间,当被拉伸螺栓的左右两侧较近位置有阻挡物时,这种螺栓拉伸器便不再适用。
技术实现思路
1、本发明的目的在于提供一种承力件施力装置,以解决现有技术中为了承力件所受力出现偏载,需要严格控制左侧驱动机构、右侧驱动机构同步动作而控制难度较大的技术问题;本发明的目的还在于提供一种使用该承力件施力装置的施力方法。
2、为解决上述技术问题,本发明中一种承力件施力装置的技术方案如下:
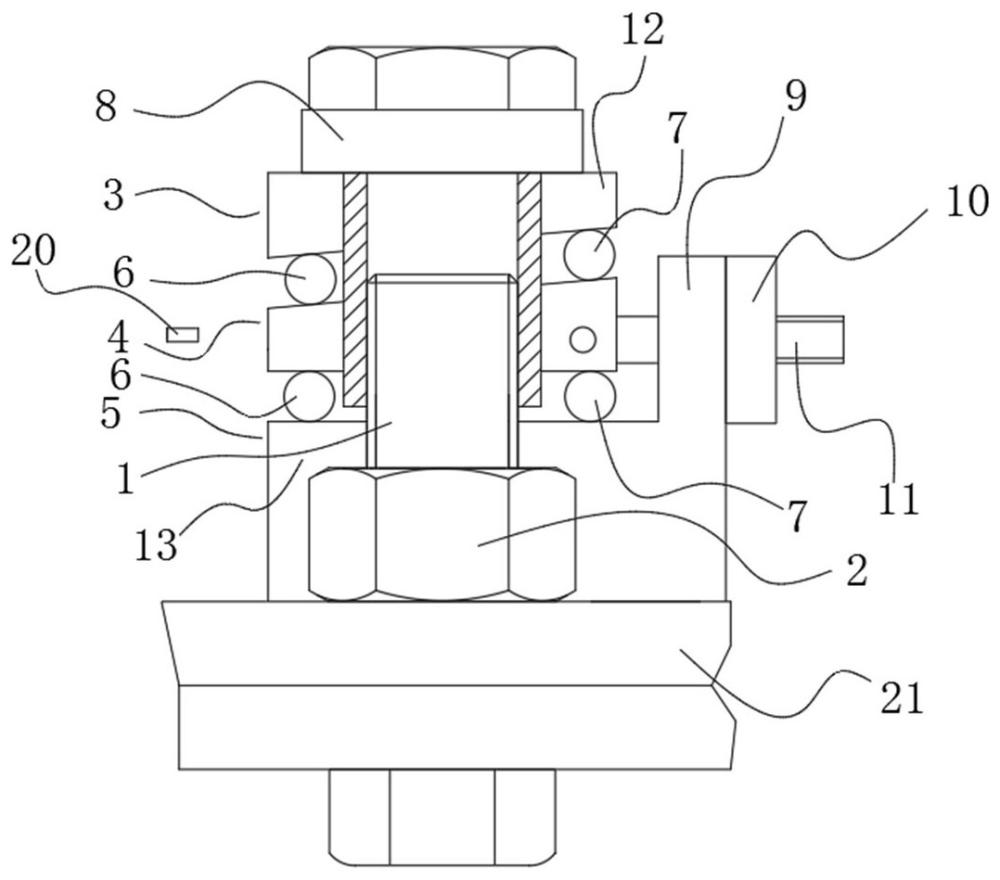
3、一种承力件施力装置,包括楔面式施力单元,楔面式施力单元包括用于对外输出顶推力的第一构件,楔面式施力单元还包括用于在一个驱动机构驱动下左右平移的第二构件,第二构件的上下两侧设置有至少两个沿左右方向顺序布置的左侧支撑滚动体和右侧支撑滚动体,第一构件的上下两个侧面中其中至少一个侧面为与左右方向倾斜布置的楔面,楔面式施力单元还包括用于检测第二构件左右方向位移量的位移传感器;或者第一构件上连接有左右顺序布置的左侧测力传感器或右侧测力传感器。
4、进一步的,第二构件的下侧设置有第三构件,左侧支撑滚动体、右侧支撑滚动体分布于第一构件、第二构件之间和第二构件、第三构件之间。
5、进一步的,左侧支撑滚动体、右侧支撑滚动体为轴线沿前后方向延伸的支撑滚柱。
6、进一步的,第一构件包括前后间隔设置的前侧第一构件和后侧第一构件,第三构件包括前后间隔设置的前侧第三构件和后侧第三构件,第二构件包括前后间隔设置的前侧第二构件和后侧第二构件,前侧第二构件、后侧第二构件的一端通过连接件相连,驱动机构通过驱动连接件左右移动而实现驱动第二构件左右移动。
7、进一步的,前侧第一构件、后侧第一构件位于承力件的前后两侧,前侧第二构件、后侧第二构件位于承力件的前后两侧,前侧第三构件、后侧第三构件位于承力件的前后两侧,左侧支撑滚动体、右侧支撑滚动体位于承力件的左右两侧。
8、进一步的,承力件施力装置包括装置基板,驱动机构包括与装置基板转动配合的驱动丝母以及与驱动丝母传动连接的轴线沿左右方向延伸的驱动丝杆,驱动丝杆与连接件相连。
9、进一步的,装置基板的上端铰接有前后间隔设置的上侧前连杆和上侧后连杆,上侧前连杆、上侧后连杆的另外一端分别与前侧第一构件和后侧第一构件铰接相连;装置基板的下端铰接有前后间隔设置的下侧前连杆和下侧后连杆,下侧前连杆、下侧后连杆的另外一端分别与前侧第三构件和后侧第三构件铰接相连。
10、本发明中,承力件施力装置的施力方法的技术方案为:该施力方法包括以下步骤:第一步,第二构件在驱动机构驱动下朝左或右平移,左侧支撑滚动体、右侧支撑滚动体朝左滚动或朝右滚动,第一构件对承力件施加朝上或朝下方向的推力;第二步有以下两种形式,第一种形式的第二步,通过位移传感器测量第二构件的水平位移量,保证b≤e*r,式中,e=1%~5%,r表示承力件的半径,b表示左侧支撑滚动体、右侧支撑滚动体之间的中心线偏离承力件轴线的位移;第二种形式的第二步,左侧测力传感器位于承力件的左侧,右侧测力传感器位于承力件的右侧,左侧测力传感器、右侧测力传感器距离承力件轴线的位移相等,当左侧测力传感器、右侧测力传感器的测力力值相等时,第二构件停止水平移动。
11、本发明的有益效果为:本发明中,通过一个驱动机构驱动第二构件左右移动,因此不存在两个驱动同步控制困难的问题,但是当第二构件左右移动时,左侧支撑滚动体和右侧支撑滚动体也会左右滚动,也就是说左侧支撑滚动体、右侧支撑滚动体对承力件的施力位置在发生变化,如果保证左侧支撑滚动体、右侧支撑滚动体对承力件的施力合力与承力件的轴线一致,来减少承力件所承受的偏心载荷成为了新的难题,本发明中创新的使用了位移传感器,或者左侧测力传感器、右侧测力传感器的配合使用来保证左侧支撑滚动体、右侧支撑滚动体对承力件的施力合力与承力件的轴线一致,从而减少承力件所承受的偏心载荷。
技术特征:
1.一种承力件施力装置,包括楔面式施力单元,楔面式施力单元包括用于对外输出顶推力的第一构件,其特征在于:楔面式施力单元还包括用于在一个驱动机构驱动下左右平移的第二构件,第二构件的上下两侧设置有至少两个沿左右方向顺序布置的左侧支撑滚动体和右侧支撑滚动体,第一构件的上下两个侧面中其中至少一个侧面为与左右方向倾斜布置的楔面,楔面式施力单元还包括用于检测第二构件左右方向位移量的位移传感器;或者第一构件上连接有左右顺序布置的左侧测力传感器或右侧测力传感器。
2.根据权利要求1所述的承力件施力装置,其特征在于:第二构件的下侧设置有第三构件,左侧支撑滚动体、右侧支撑滚动体分布于第一构件、第二构件之间和第二构件、第三构件之间。
3.根据权利要求2所述的承力件施力装置,其特征在于:左侧支撑滚动体、右侧支撑滚动体为轴线沿前后方向延伸的支撑滚柱。
4.根据权利要求3所述的承力件施力装置,其特征在于:第一构件包括前后间隔设置的前侧第一构件和后侧第一构件,第三构件包括前后间隔设置的前侧第三构件和后侧第三构件,第二构件包括前后间隔设置的前侧第二构件和后侧第二构件,前侧第二构件、后侧第二构件的一端通过连接件相连,驱动机构通过驱动连接件左右移动而实现驱动第二构件左右移动。
5.根据权利要求4所述的承力件施力装置,其特征在于:前侧第一构件、后侧第一构件位于承力件的前后两侧,前侧第二构件、后侧第二构件位于承力件的前后两侧,前侧第三构件、后侧第三构件位于承力件的前后两侧,左侧支撑滚动体、右侧支撑滚动体位于承力件的左右两侧。
6.根据权利要求4所述的承力件施力装置,其特征在于:承力件施力装置包括装置基板,驱动机构包括与装置基板转动配合的驱动丝母以及与驱动丝母传动连接的轴线沿左右方向延伸的驱动丝杆,驱动丝杆与连接件相连。
7.根据权利要求6所述的承力件施力装置,其特征在于:装置基板的上端铰接有前后间隔设置的上侧前连杆和上侧后连杆,上侧前连杆、上侧后连杆的另外一端分别与前侧第一构件和后侧第一构件铰接相连;装置基板的下端铰接有前后间隔设置的下侧前连杆和下侧后连杆,下侧前连杆、下侧后连杆的另外一端分别与前侧第三构件和后侧第三构件铰接相连。
8.一种使用权利要求1~7任意一项所述的承力件施力装置的施力方法,其特征在于:该施力方法包括以下步骤:第一步,第二构件在驱动机构驱动下朝左或右平移,左侧支撑滚动体、右侧支撑滚动体朝左滚动或朝右滚动,第一构件对承力件施加朝上或朝下方向的推力;第二步有以下两种形式,第一种形式的第二步,通过位移传感器测量第二构件的水平位移量,第二构件的位移结束时,需要保证b≤e*r,式中,e=1%~5%,r表示承力件的半径,b表示左侧支撑滚动体、右侧支撑滚动体之间的中心线偏离承力件轴线的位移;第二种形式的第二步,左侧测力传感器位于承力件的左侧,右侧测力传感器位于承力件的右侧,左侧测力传感器、右侧测力传感器距离承力件轴线的位移相等,当左侧测力传感器、右侧测力传感器的测力力值相等时,第二构件停止水平移动。
技术总结
本发明涉及一种承力件施力装置及施力方法,承力件施力装置包括楔面式施力单元,楔面式施力单元包括用于对外输出顶推力的第一构件,楔面式施力单元还包括用于在一个驱动机构驱动下左右平移的第二构件,第二构件的上下两侧设置有至少两个沿左右方向顺序布置的左侧支撑滚动体和右侧支撑滚动体,第一构件的上下两个侧面中其中至少一个侧面为与左右方向倾斜布置的楔面,楔面式施力单元还包括用于检测第二构件左右方向位移量的位移传感器;或者第一构件上连接有左右顺序布置的左侧测力传感器或右侧测力传感器。本发明解决了现有技术中为了承力件所受力出现偏载,需要严格控制左侧驱动机构、右侧驱动机构同步动作而控制难度较大的技术问题。
技术研发人员:尚廷东,徐小磊,王丽红,贾洋,彭梦男,任玉志
受保护的技术使用者:郑州东辰科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!