一种铁路车辆摇枕的机器人等离子切割方法与流程
本发明属于切割,具体涉及一种铁路车辆摇枕的机器人等离子切割方法。
背景技术:
1、摇枕是铁路车辆主要产品,是铁路车辆转向架的重要组成部分,目前摇枕产品有十余种,其中转k6型摇枕是目前生产批量最大的国铁货车转向架用铸钢零部件,适用于c70、c80b、p70等多种型号的铁路货车。转k6型摇枕属于弧形箱式结构,比较复杂,且材质是铸钢件,含硅、锰,属于高硬度材质。转k6型摇枕大多采用铸造工艺生产,铸造产生的浇冒口需要进行切割去除。现有的切割方式是,人工使用火焰切割枪对浇冒口进行切割,经喷丸处理后,再由人工使用碳弧气刨机对浇冒口余根进行气刨处理。
2、现有的人工生产模式、人工物流转运等制造手段较为落后,尚未实现自动化生产,无法满足量产节拍需求,且存在安全隐患大、作业环境恶劣、职业病危害因素大、操作者劳动强度高、招工困难、人工成本高、质量效率因人而异等问题,已成为制约产品质量一致性和可靠性提升的关键。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种铁路车辆摇枕的机器人等离子切割方法,以解决人工切割工艺安全隐患大,作业环境火花、烟雾、粉尘浓度高的问题。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种铁路车辆摇枕的机器人等离子切割方法,该方法包括如下步骤:
5、s101、人工检查摇枕有无瑕疵,无瑕疵开始准备切割;
6、s102、人工使用单臂吊将摇枕吊运至切割设备的专用工装上,操作人员按下设备启动按钮,设备通电工作,防护房的安全卷帘门抬起打开,待切割摇枕通过物流滑台系统输送至防护房内的切割工位;
7、s103、防护房的安全卷帘门下降关闭;
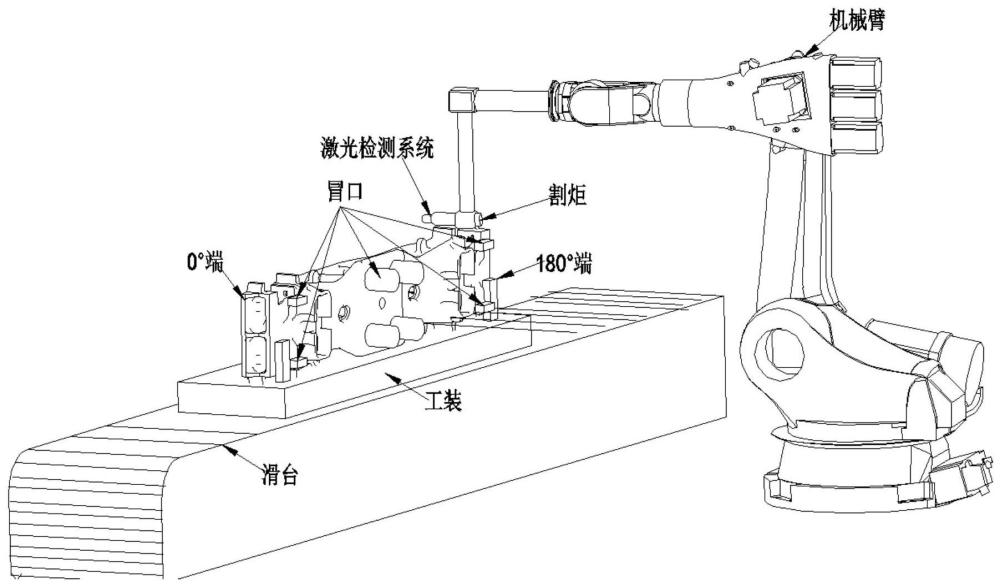
8、s104、安装在切割机器人执行端的激光检测系统先在摇枕的一端的侧面设置触点,该端记做0°端,进行取点测量,然后再测量摇枕的0°端上表面;
9、s105、物流滑台系统带动转台上的摇枕旋转180°进行测量;
10、s106、检测完毕后,依据测量数据,确定摇枕切割部位的几何参数,将数据输入设备工控电脑,机器人根据参数修正起弧位置;
11、s107、切割机器人六轴协同动作,从180°端开始依次对待切割部位进行切割;
12、s108、切割作业完毕后,机器人主轴退让到安全距离,割炬机械臂旋转至90°,机器人进入待命状态,切割机器人回到原始位置;
13、s109、物流滑台系统输送摇枕开始退出,防护房的安全卷帘门抬起打开,物流滑台系统将携带摇枕的工装输送至防护房外;
14、s110、人工借助悬臂吊将摇枕卸下。
15、(三)有益效果
16、本发明提出一种铁路车辆摇枕的机器人等离子切割方法,本发明的关键点一是摇枕的机器人自动切割方法步骤,以及每个步骤的工艺参数设定。二是等离子切割方法代替火焰切割和气刨方法,等离子切割比火焰切割和碳弧气刨更安全;等离子切割适用于几乎所有金属,且不存在碳弧气刨普遍存在的渗碳问题;由于高能量密度的等离子气是连续产生的,因此非常适合于实现自动化操作;等离子气刨相对于碳弧气刨,其产生的噪音等级也较低(通常比碳弧气刨小5~10db),另外其气刨所产生的污染粉尘要比碳弧气刨少许多。
17、本发明的优点在于采用机器人对铁路车辆摇枕进行自动化切割,具有操作简单,人机隔离安全隐患低,消除烟雾粉尘及火花对人体的伤害,劳动强度低,切割工艺流程固化,产品质量一致性高,切割过程无需人工干预等诸多优点。
技术特征:
1.一种铁路车辆摇枕的机器人等离子切割方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,工装设有自动液压夹紧机构。
3.如权利要求1所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s105具体包括:激光检测系统先对摇枕的另一端的侧面设置触点,该另一端记做180°端,进行取点测量,然后再测量摇枕的180°端上表面。
4.如权利要求1所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s107中,待切割部位包括:八字面冒口。
5.如权利要求1所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s107中,等离子电弧割炬枪头使用循环水冷却。
6.如权利要求5所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s107中,等离子电弧设备设定压缩空气气压为0.35~0.6mpa,设定工作电压为200~245v,工作电流为580~700a。
7.如权利要求5所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s107中,等离子电弧设备电弧割炬枪头走刀速度1.7~2.3mm/s。
8.如权利要求5所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,所述s107中,等离子电弧割炬枪头走刀路径为先沿冒口外沿切割八字面冒口,再切割心盘冒口。
9.如权利要求8所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,八字面冒口采用先下后上切割。
10.如权利要求8所述的铁路车辆摇枕的机器人等离子切割方法,其特征在于,心盘冒口采用先上后下切割。
技术总结
本发明涉及一种铁路车辆摇枕的机器人等离子切割方法,属于切割技术领域。本发明采用摇枕的机器人自动切割方法,以及每个步骤的工艺参数设定,采用等离子切割方法代替火焰切割和气刨方法。本发明的优点在于采用机器人对铁路车辆摇枕进行自动化切割,具有操作简单,人机隔离安全隐患低,消除烟雾粉尘及火花对人体的伤害,劳动强度低,切割工艺流程固化,产品质量一致性高,切割过程无需人工干预等诸多优点。
技术研发人员:张校铖,马宁,郝慧慧,杨春光,张鹏,张磊,邢颖,张立宾,樊超,王虎明,韩宝,宋淳,侯保敏,高培军,高瑞,陈玮
受保护的技术使用者:内蒙古第一机械集团股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!