一种人防门活门槛焊接机器人工作站的制作方法
本发明涉及活门槛焊接,具体为一种人防门活门槛焊接机器人工作站。
背景技术:
1、人防门就是人民防护工程出入口的门,人防门分类比较鲜明,有普通单、双扇防护密闭门和密闭门,活门槛单、双扇防护密闭门和密闭门等多种人防设备,目前市面上活门槛的生产很是常见,主要是因为人防门一般都要设计一个凸出于地面的门槛,但这种门槛并不利于车辆的出行,由此设计出活门槛,因此销量增长,以适应市场需求。
2、目前在进行人防门生产时,常采用人工对多面板材进行焊接,但此焊接方式十分不便,需要投入大量的人力成本,且在进行多面焊接时,还需要进行人工翻转,不能进行智能化生产,与此同时,在人工焊接时还不能保证部件间的紧密连接,若是发生较大浮动且人工未注意时,易造成焊接缝隙,且造成焊接不牢固,由此上述现象成为本领域人员亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种人防门活门槛焊接机器人工作站,以解决上述背景技术中提出的问题。
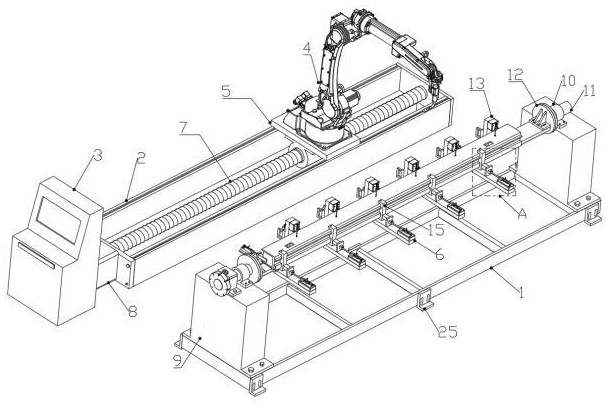
2、为了解决上述技术问题,本发明提供如下技术方案:一种人防门活门槛焊接机器人工作站,包括焊接机器人、设置于焊接机器人下方的底架二以及设置于焊接机器人一侧的底架一,所述焊接机器人的另一侧电连接有控制箱,所述控制箱内设置有焊接控制系统,用于控制整个焊接过程,所述底架一上方设置有支撑板,所述支撑板上设置有加工工件,所述支撑板上设置有一组第一推钳、一组第二推钳、一组第三推钳,用于对加工工件进行夹持,所述第一推钳、第二推钳、第三推钳内均设置有夹持组件,所述夹持组件包括移动杆,所述第二推钳处的移动杆的下端固定连接有伸缩杆,所述伸缩杆为电控元件,所述伸缩杆的输出端固定连接有压块,所述压块的内部设置有压力传感器。
3、本发明进一步说明,所述底架二的内壁轴承连接有第一螺杆,所述底架二的外部设置有第一驱动部,所述第一驱动部输出端与第一螺杆固定连接,所述第一螺杆上螺纹连接有第一滑座,所述第一滑座的两侧与底架二的两侧滑动连接,所述底架二的上表面与焊接机器人底部螺栓固定。
4、本发明进一步说明,所述底架一的两侧均螺栓固定有支架,所述支架的上表面螺栓固定有支座,所述支座的内部轴承连接有支撑轴,所述支撑轴的相对面均固定有圆盘,所述圆盘的另一侧表面中部固定有三角架,所述三角架的底部与支撑板螺栓固定,其中一侧所述支架上螺栓固定有第二驱动部,所述第二驱动部与旋转单元信号连接,所述第二驱动部的输出端与相邻一侧的支撑轴相固定。
5、本发明进一步说明,所述加工工件包括角钢、定位块、盖板、l型铁块、扁铁,所述扁铁、l型铁块从上至下焊接于角钢的侧面。
6、本发明进一步说明,所述第一推钳包括第一底座,所述第二推钳包括第二底座,所述第三推钳包括第三底座,所述第一底座、第二底座、第三底座上均与夹持组件相固定,所述第二底座的中部贯穿设置有支撑块,所述第二底座的底部固定有第二滑座,一组所述第二推钳的下侧均对应开设有第三滑槽,所述第三滑槽的一端固定有第三驱动部,所述第三驱动部的输出端固定连接有第三螺杆,所述第三螺杆与第二滑座间螺纹连接。
7、本发明进一步说明,所述夹持组件包括底板,所述底板的上表面两端均分别固定有转动座、支撑滑座,所述转动座内部转动连接有拉手,所述拉手的中部铰接有一组连接板,一组所述连接板的另一端与移动杆相铰接,所述移动杆与支撑滑座的内部滑动连接。
8、本发明进一步说明,所述第三推钳与第一推钳的移动杆均铰接有连接块,所述第一推钳处的连接块一侧固定有夹块,所述第三推钳处的连接块一侧通过杆件固定连接有卡板。
9、本发明进一步说明,所述焊接控制系统包括运行模块,运行模块包括吊装单元、夹持单元、焊接单元和旋转单元,所述焊接控制系统还包括判断模块和调试模块,所述调试模块通过判断模块与运行模块信号连接,所述判断模块包括压力传感单元、数据分析单元,所述调试模块包括滑动单元和警报单元。
10、与现有技术相比,本发明所达到的有益效果是:
11、通过设置有焊接机器人、控制箱、第一推钳、第二推钳、一第三推钳,第一推钳、第二推钳、第三推钳内均设置有夹持组件,实现了人防门活门槛焊接机器人工作站对加工工件的夹持以及旋转式的智能焊接,提高了生产效率;
12、通过设置有焊接控制系统、伸缩杆、压力传感器,在焊接过程中进行夹持处的稳定性检测,并得出相应的稳定性系数,根据稳定性系数判断出加工工件被夹持处的稳定性结论;
13、通过设置有第三驱动部、第三滑槽、第二滑座,在调试模块运行下,根据稳定性系数智能调整支撑块的支撑位置,实现稳定性的增强。
技术特征:
1.一种人防门活门槛焊接机器人工作站,包括焊接机器人(4)、设置于焊接机器人(4)下方的底架二(2)以及设置于焊接机器人(4)一侧的底架一(1),所述焊接机器人(4)的另一侧电连接有控制箱(3),所述控制箱(3)内设置有焊接控制系统,用于控制整个焊接过程,其特征在于:所述底架一(1)上方设置有支撑板(17),所述支撑板(17)上设置有加工工件,所述支撑板(17)上设置有一组第一推钳(14)、一组第二推钳(13)、一组第三推钳(6),用于对加工工件进行夹持,所述第一推钳(14)、第二推钳(13)、第三推钳(6)内均设置有夹持组件,所述夹持组件包括移动杆,所述第二推钳(13)处的移动杆的下端固定连接有伸缩杆(132),所述伸缩杆(132)为电控元件,所述伸缩杆(132)的输出端固定连接有压块(133),所述压块(133)的内部设置有压力传感器(134)。
2.根据权利要求1所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述底架二(2)的内壁轴承连接有第一螺杆(7),所述底架二(2)的外部设置有第一驱动部(8),所述第一驱动部(8)输出端与第一螺杆(7)固定连接,所述第一螺杆(7)上螺纹连接有第一滑座(5),所述第一滑座(5)的两侧与底架二(2)的两侧滑动连接,所述底架二(2)的上表面与焊接机器人(4)底部螺栓固定。
3.根据权利要求1所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述底架一(1)的两侧均螺栓固定有支架(9),所述支架(9)的上表面螺栓固定有支座(10),所述支座(10)的内部轴承连接有支撑轴(11),所述支撑轴(11)的相对面均固定有圆盘(12),所述圆盘(12)的另一侧表面中部固定有三角架(18),所述三角架(18)的底部与支撑板(17)螺栓固定,其中一侧所述支架(9)上螺栓固定有第二驱动部(16),所述第二驱动部(16)与旋转单元信号连接,所述第二驱动部(16)的输出端与相邻一侧的支撑轴(11)相固定。
4.根据权利要求3所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述加工工件包括角钢(19)、定位块(20)、盖板(22)、l型铁块(23)、扁铁(24),所述扁铁(24)、l型铁块(23)从上至下焊接于角钢(19)的侧面。
5.根据权利要求4所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述第一推钳(14)包括第一底座(141),所述第二推钳(13)包括第二底座(131),所述第三推钳(6)包括第三底座(61),所述第一底座(141)、第二底座(131)、第三底座(61)上均与夹持组件相固定,所述第二底座(131)的中部贯穿设置有支撑块(21),所述第二底座(131)的底部固定有第二滑座(35),一组所述第二推钳(13)的下侧均对应开设有第三滑槽(32),所述第三滑槽(32)的一端固定有第三驱动部(33),所述第三驱动部(33)的输出端固定连接有第三螺杆(34),所述第三螺杆(34)与第二滑座(35)间螺纹连接。
6.根据权利要求5所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述夹持组件包括底板(31),所述底板(31)的上表面两端均分别固定有转动座(27)、支撑滑座(30),所述转动座(27)内部转动连接有拉手(28),所述拉手(28)的中部铰接有一组连接板(29),一组所述连接板(29)的另一端与移动杆相铰接,所述移动杆与支撑滑座(30)的内部滑动连接。
7.根据权利要求6所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述第三推钳(6)与第一推钳(14)的移动杆均铰接有连接块(36),所述第一推钳(14)处的连接块(36)一侧固定有夹块(26),所述第三推钳(6)处的连接块(36)一侧通过杆件固定连接有卡板(15)。
8.根据权利要求7所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述焊接控制系统包括运行模块,运行模块包括吊装单元、夹持单元、焊接单元和旋转单元,所述焊接控制系统还包括判断模块和调试模块,所述调试模块通过判断模块与运行模块信号连接,所述判断模块包括压力传感单元、数据分析单元,所述调试模块包括滑动单元和警报单元;
9.根据权利要求8所述的一种人防门活门槛焊接机器人工作站的工艺流程,其特征在于:
10.根据权利要求9所述的一种人防门活门槛焊接机器人工作站,其特征在于:所述s2的稳定性检测的内容如下:
技术总结
本发明公开了一种人防门活门槛焊接机器人工作站,涉及活门槛焊接技术领域,包括焊接机器人、设置于焊接机器人下方的底架二以及设置于焊接机器人一侧的底架一,所述焊接机器人的另一侧电连接有控制箱,所述控制箱内设置有焊接控制系统,用于控制整个焊接过程,所述支撑板上设置有一组第一推钳、一组第二推钳、一组第三推钳,所述第一推钳、第二推钳、第三推钳内均设置有夹持组件,所述夹持组件包括移动杆,所述第二推钳处的移动杆的下端固定连接有伸缩杆,所述伸缩杆的输出端固定连接有压块,所述压块的内部设置有压力传感器,该装置解决了当前活门槛生产时如何实现智能焊接,且如何在焊接过程中进行焊接的稳定性判断的问题。
技术研发人员:周传海,潘文忠,沈建国,张勇
受保护的技术使用者:盐城耀晖人防防护设备科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!