一种具有多夹爪的移动机器人上下料设备的制作方法
本技术涉及用于移动机器人自动化上下料领域,具体涉及一种具有多夹爪的移动机器人上下料设备。
背景技术:
1、机器人自动化上下料领域,传统解决方法是采取单一夹具夹取或放下工件来完成不同工位的交换,这样就导致机械臂需要在加工机床与原料之间多次往复运动,从而进行上下料作业;多次的往复运动,增加了设备使用时间、降低了上下料作业的效率,间接增加了生产成本。
技术实现思路
1、本实用新型的目的是提供一种具有多夹爪的移动机器人上下料设备,能够将多夹爪应用于移动机器人自动化上下料领域;由于使用了多夹爪,从而减少了往复运动的次数,节省了设备使用成本,提高了上下料作业灵活性;节省了设备数量,也就减小了上下料调度系统的调度压力,使移动机器人在多工位间的移动更畅通,提高了自动化上下料的工作效率。
2、为了达到上述目的,本实用新型有如下技术方案:
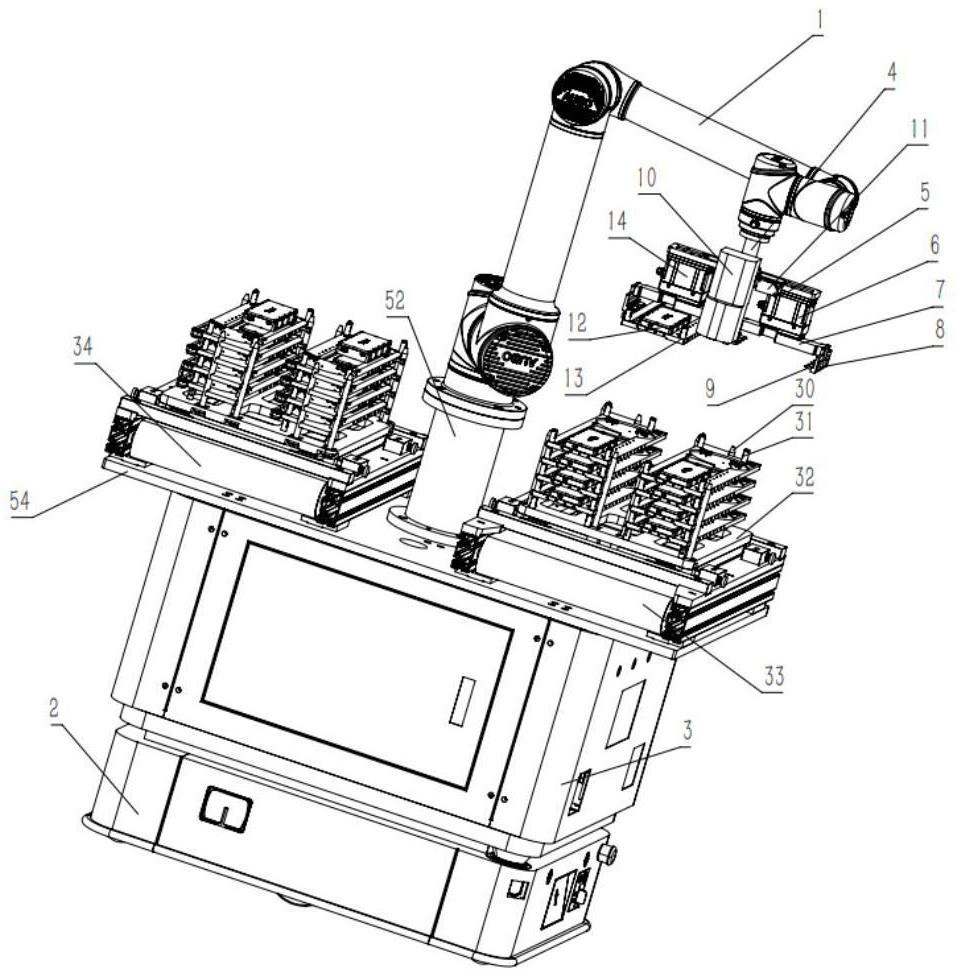
3、本实用新型的一种具有多夹爪的移动机器人上下料设备,包括机械臂,移动机器人,电控柜,末端连接件,左侧滚筒装置,右侧滚筒装置,机械臂安装加高座,平台框架面板,夹爪装置,所述电控柜安装在移动机器人上,平台框架面板安装在电控柜上,左侧滚筒装置,右侧滚筒装置安装在平台框架面板上,左侧滚筒装置,右侧滚筒装置呈对称分布,机械臂安装加高座位于左侧滚筒装置,右侧滚筒装置中间,机械臂安装加高座与平台框架面板连接;机械臂安装加高座上安装有机械臂,末端连接件与机械臂末端连接,所述末端连接件与夹爪装置连接。
4、其中,所述夹爪装置包括夹爪安装板,左侧电爪,右侧电爪,夹持手指安装座,夹持手指,夹持销,视觉组件,激光位移传感器,所述左侧电爪,右侧电爪安装在夹爪安装板下方;所述左侧电爪,右侧电爪下方分别连接两个夹持手指安装座,夹持手指安装座上连接夹持手指,夹持手指上有四根夹持销用于夹住工件;夹爪安装板通过末端连接件与机械臂连接;视觉组件与夹爪安装板相连,激光位移传感器与夹爪安装板相连,且位于视觉组件的左侧。
5、其中,所述左侧滚筒装置,右侧滚筒装置为相同结构的装置;左侧滚筒装置,右侧滚筒装置均包括托盘、工件、托盘导向柱、冶具支撑杆、工件放置底板、滚筒;工件固定在配套的托盘上,托盘两侧有可供夹持销配合的盲孔,在视觉组件与激光位移传感器的共同定位下,夹持手指上的四根夹持销夹住工件;所述滚筒上有工件放置底板,将加工好或者未加工的工件置于工件放置底板上方,工件之间用冶具支撑杆连接,保证放置和夹取时的精度,工件四个为一组堆叠,堆叠时用冶具支撑杆保证竖直方向上的精度,八个工件分为两组,左右两侧对称分布。
6、本实用新型的优点在于:
7、1、本实用新型将机器人多夹爪用于移动机器人自动化上下料领域,在此领域的传统解决方法是采取单一夹具解决方案,这样就导致需要多次进行上下料作业;而本实用新型由于使用了机器人多夹爪,从而减少了上下料时间,节省了设备使用成本、提高了上下料作业灵活性。
8、2、由于节省了设备时间,也就减小了上下料调度系统的调度压力,使移动机器人在多工位间的移动更畅通,一定程度上提高了自动化上下料的工作效率。
技术特征:
1.一种具有多夹爪的移动机器人上下料设备,其特征在于:包括机械臂,移动机器人,电控柜,末端连接件,左侧滚筒装置,右侧滚筒装置,机械臂安装加高座,平台框架面板,夹爪装置,所述电控柜安装在移动机器人上,平台框架面板安装在电控柜上,左侧滚筒装置,右侧滚筒装置安装在平台框架面板上,左侧滚筒装置,右侧滚筒装置呈对称分布,机械臂安装加高座位于左侧滚筒装置,右侧滚筒装置中间,机械臂安装加高座与平台框架面板连接;机械臂安装加高座上安装有机械臂,末端连接件与机械臂末端连接,所述末端连接件与夹爪装置连接。
2.按照权利要求1所述的一种具有多夹爪的移动机器人上下料设备,其特征在于:所述夹爪装置包括夹爪安装板,左侧电爪,右侧电爪,夹持手指安装座,夹持手指,夹持销,视觉组件,激光位移传感器,所述左侧电爪,右侧电爪安装在夹爪安装板下方;所述左侧电爪,右侧电爪下方分别连接两个夹持手指安装座,夹持手指安装座上连接夹持手指,夹持手指上有四根夹持销用于夹住工件;夹爪安装板通过末端连接件与机械臂连接;视觉组件与夹爪安装板相连,激光位移传感器与夹爪安装板相连,且位于视觉组件的左侧。
3.按照权利要求1所述的一种具有多夹爪的移动机器人上下料设备,其特征在于:所述左侧滚筒装置,右侧滚筒装置为相同结构的装置;左侧滚筒装置,右侧滚筒装置均包括托盘、工件、托盘导向柱、冶具支撑杆、工件放置底板、滚筒;工件固定在配套的托盘上,所述滚筒上有工件放置底板,将加工好或者未加工的工件置于工件放置底板上方,工件之间用冶具支撑杆连接,保证放置和夹取时的精度,工件四个为一组堆叠,堆叠时用冶具支撑杆保证竖直方向上的精度,八个工件分为两组,左右两侧对称分布。
技术总结
本技术涉及一种具有多夹爪的移动机器人上下料设备,电控柜安装在移动机器人上,平台框架面板安装在电控柜上,左侧滚筒装置,右侧滚筒装置安装在平台框架面板上,左侧滚筒装置,右侧滚筒装置呈对称分布,机械臂安装加高座位于左侧滚筒装置,右侧滚筒装置中间,机械臂安装加高座与平台框架面板连接;机械臂安装加高座上安装有机械臂,末端连接件与机械臂末端连接,所述末端连接件与夹爪装置连接;本技术由于使用了多夹爪,从而减少了往复运动的次数,节省了设备使用成本,提高了上下料作业灵活性;节省了设备数量,也就减小了上下料调度系统的调度压力,提高了自动化上下料的工作效率。
技术研发人员:刘顶,张军,陈威,郑曙光
受保护的技术使用者:艾思博(武汉)科技有限公司
技术研发日:20230210
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!